記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
「次世代ロボット共通プラットフォーム技術の確立」シンポジウムレポート |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2月26日(木)、東京・秋葉原のアキバプラザにて、科学技術連携施策群 次世代ロボット連携群平成20年度シンポジウム「次世代ロボット共通プラットフォーム技術の確立」が開催された。「次世代ロボット連携群」関連の発表はこれまで何度も行なわれてきたが、今年度で終了するプロジェクトのため、これが最後の成果発表となる。 まずはじめに内閣府政策統括官付参事官(情報通信担当)の大久保明氏は「ロボットに対する期待は大きい。既存技術をベースにした産業展開は頭打ちになっており、新たな展開を求めている。そのなかで一般の人に接するところで活用されるロボットはイノベーションとして期待されている。社会の柱にしようとする動きや利用者からの要望も顕在化してきている。テレビ番組で取り上げられることの多さも国民の関心を反映している。医療介護での期待も高い。昨今の経済状況を打破する技術としてロボット技術は欠かせない。連携群の成果を繋げていくことが重要。成果のフォローアップを含めて総合科学技術会議のなかで議論する場をもっていきたい」と開会挨拶を述べた。 前述のように今回が最後の成果発表となるため「次世代ロボット連携群創設関係者の挨拶」として、次世代ロボット連携群で最初のコーディネータを務めた工学院大学学長の三浦宏文氏と、井澤元参事官(現・総務省統合推進局長)がプロジェクトを振り返った。連携施策群が始まった当初、4年前は非常に熱気があったという。平成19年6月に亡くなった故・谷江和雄元主幹(首都大学東京教授)のことを振り返りながら三浦、井澤の両氏は語った。平成19年後からはコーディネータと主幹は東京大学の佐藤知正氏が務めている。当時、他にはICタグ、ユビキタスのテーマがあり、その補完テーマとして始まったものだったという。詳細は平成18年度成果報告レポートそのほか、本誌過去記事を参照して欲しい。 また、総合科学技術会議議員 奥村直樹氏は午後のセッション冒頭で「産業用ロボットだけではなく生活支援ロボットでも世界のトップを切りたい。センサー、処理、アクチュエーターの3要素を上位統合したところでロボットができる。日本の強みを統合してさらに強みを発揮できる分野がロボット。だから施策として進める意義がある。ロボットは技術の結晶であり、成果は国民に分かりやすいもの。それは第3期科学技術基本計画に沿うものだ。先進国は少子高齢化技術のマーケットになる。ロボットはリーディング産業になる可能性が高い」と述べ、各方面からのロボットへの期待は高いと挨拶した。
● 基調講演「ロボット活用社会への道2.0」
まず10年のスパンで見ると、ロボットにはキラーアプリがないと言われているが、そんなことはないと述べた。たとえば笑った瞬間にシャッターが切れるスマイルシャッターはRTの1つだと捉えているという。日本は輸出量の半分がメカトロであり、メカトロが国を支えている。それをRTで強化することが重要であり、ロボットはメカトロのフラッグシップだという。さらに自動車や住宅への応用も考えられる。オフィスだけではなく家庭にもセンサーや制御技術が入る余地は大きい。いろんなところにRTを入れていくベースを作ることが重要であり、そのためにはソフトウェアを作ること、計測技術のベースをつくる必要がある。このような考え方が連携施策群のベースであると述べた。 従来の市場にもRTが投入される。富士重工業の掃除ロボットが最もよい例であると考えているという。またプラットフォームのようなロボットができれば、今後大きく伸びる可能性もある。ロボット単体ではなく、コンテンツやサービスを含めた展開もできる。そのような面での研究開発も今後行なう必要があると述べた。まとめるとここ10年では、最初はRT応用市場、それから従来市場へのRT適用が始まると捉えているという。 いっぽう、50年先を見据えて描かれたのが「ロボット分野におけるアカデミック・ロードマップ」だ。100人を超える執筆者が、これまでの50年を踏まえながら、ロボットの将来イメージ、進化系統図、若手研究者たちに取り組んでもらいたい課題をまとめたものだ。こちらの詳細は、本誌過去記事を参照していただきたい。佐藤氏は、1970年にできた世界初のハンドアイシステム「ETLロボットMK-1」と、ファナックの高速ロボットやIRTの家事支援ロボットなどを比較した。 さて、自動車でも今日を迎えるまでに150年かかっている。その間には道路の整備など大きな社会投資が行なわれた。ロボットにおいても普及においてはかなりの社会投資が必要だと考えられる。だがこれからは人間生活に社会投資を行なうべきであり、それは結果的にロボットへの投資になるはずだと語った。今後においては「生活機能構成」を計算機上、ロボット上で実現することが重要であるとし、ロボットは再現性のある観測を可能にする新しい研究分野を生むものであり、21世紀をつらぬくプロジェクトをやったらどうかと提案した。特にこれまでのプロジェクトは一度で終わってしまうがスパイラルで継続していくことが重要なのではないかと述べた。
● 次世代ロボット連携群の総括 共通プラットフォーム技術と展開
具体的には、OpenHRP3、ロボットタウンプラットフォーム、関西と神奈川の環境プラットフォームである。本誌ではいずれのプラットフォームも既にレポート済みなので、過去の記事をあわせて参照されたい。府省連携に関しては今後は「次世代ロボット推進委員会」に引き継がれていく予定だという。
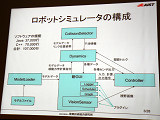
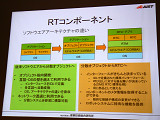
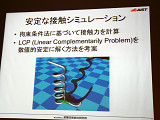
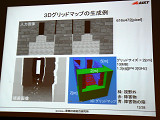
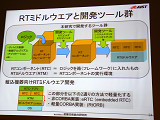
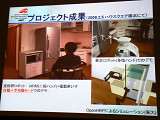
このあと4件の補完的課題の発表が行なわれた。まず最初に独立行政法人産業技術総合研究所 知能システム研究部門副研究部門長の比留川博久氏から発表されたのは「ロボットシミュレータとソフトウェアプラットフォーム」と題されたOpenHRP3について。2008年6月からオープンソースで配布されているOpenHRP3は、分散コンポーネントフレームワーク(RTミドルウェア)を使ったソフトウェア開発・シミュレーション用統合ソフトウェア・プラットフォームだ。ソフトウェアはインターフェイス仕様、データのストリーミング仕様を決めたRTコンポーネントとして書かれており、共用できる。モーターの選定、ギア比の選定など、かなりのレベルまでの開発が今やシミュレータ上でできるようになっているという。 OpenHRP3では動力学計算エンジンに東京大学中村・山根研究室グループが開発した「ADA(Assembly-Disassembly Algorithm)エンジン」と産総研が開発した「ABA(Articulated Body Algorithm)エンジン」の2種類の計算エンジンを新規に開発して実装している。これまで数値的に安定に解くのが難しかった問題を東大の中村研と産総研で共同で安定に解く方法を見つけて実装した。 比留川氏はロボットが見た映像に対して3Dグリッドマップを作るシミュレーションの様子などを示した。今後、より広範囲のソフトウェアの評価をシミュレーションでできるようにしていき、もっと普及活動につとめたいと述べた。目指しているのは、ロボットの開発効率を上げ、開発予算を下げることだという。たとえばインテグレータと要素部品メーカでやりとりするときも標準仕様があったほうが効率化される。そのために開発に必要な一連のツールチェーンを整備しようと努力しているという。またCORBAを使わない実装や、軽量CORBAを採用した実装も検討中だと述べた。
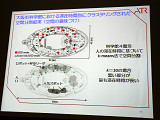
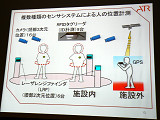
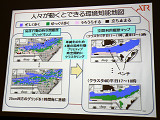
午後は主に環境プラットフォームに関する発表が行なわれた。まず株式会社ATR知能ロボティクス研究所所長の萩田紀博氏は「人間計測環境PFとネットワークロボット」について発表した。人間の位置、移動の履歴をロボットが把握できれば、その人が何をしている人で、どこへ行こうとしているのか予測ができる。ロボットは人を「待ち伏せ」してサービスを行なうことができる。萩原氏はユニバーサルシティウォークでの実証実験の模様を交えながら、ロボット周囲の環境、「環境知能」の話を講演した。下記の講演については「ユニバーサル・シティウォーク大阪で4社7体のロボットを連携して実証実験」他を参照して頂きたい。 最初は無線タグを使うことで、人と人の距離やクラスタリングを行ない、履歴を取ることで空間の意味づけを行なうことから始めた。人の位置が性格にとれると、詳細な行動を取ることができる。環境プラットフォームでは、カメラとレーザーレンジファインダー、RFIDリーダを使って位置をとっている。いまは5cmくらいの精度で位置をとることができる。 詳細な局所行動をとり、10カテゴリに行動プリミティブをわける。1人1人の軌跡だけではなく、各人がどういう行動をとっているかまでわかり、アノテーションをつけることができる。さらにこれを毎日とっていると、大局的行動データが取れるようになる。常に人が忙しく歩いて通り抜けている場所や、ゆっくり歩いていく領域が分かるようになるのだ。1時間単位でこういうデータがとれると、時間帯ごとの人の動きも予測できるようになる。 また、一度このような人間の行動辞書ができると、未知の人が入ってきても、どういうサービスを提供するべきかが事前にある程度予測可能になる。ロボット単体の知能ではできないことが環境知能と組み合わせるとできるようになるのだ。対象となる人を逐次予測するシステムを使えば、何曜日の何時ごろにロボットをうろつかせると効果的か、ということも分かる。 このような位置情報ベースのサービス、経済産業省的な言い方では「G空間」でのサービスは、インターネット空間で実行されているリコメンド的なサービスを実空間で行なうためには必要な技術である。ロボットやロボット的存在が環境情報構造化された環境ではこれらの役割を担う。また、ある程度ロボットを自律化させれば、遠隔オペレータが複数のロボットを扱って対人サービスすることもできる。萩田氏は4台のロボットを1人のオペレータが遠隔操作する実験の様子を示した。また、関西のプラットフォームでは、EUのロボットや、ホンダASIMOとの連携も行なった。萩田氏は、「環境知能はこれからのロボットビジネスの鍵を握る」と語った。今後の課題としては、実験場所の確保や生活者の理解などが挙げられるという。
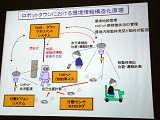
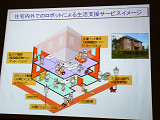
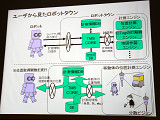
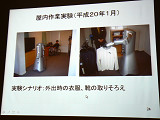
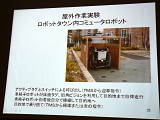
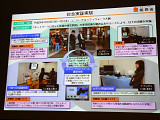
九州大学大学院システム情報科学研究院教授の長谷川勉氏は、昨年度まで実施した「ロボットタウン・プロジェクト」について発表した。街中に配置したビジョンやセンサーシステムで人の動きを常に監視し、その情報はタウンマネージメントシステム(TMS)と呼ばれるサーバが管理する。ロボットはそのTMSに情報を問い合わせて動作を決定する。こちらに関しては「ロボットタウン実証実験公開」ほかを合わせて参照されたい。 このシステムのためには環境地図が必要だが、環境情報構造化を行なうためのロボットシステムも創られている。親ロボットと子供ロボット、カメラなどからなるシステムで、100m×100mくらいの領域をロボットが動き回り4時間ほどですべてのデータを取り終えて、簡単に再構成することができる。このようなシステムでロボットは家のなかのセンサーをあたかも自分のセンサーであるかのように用いて、ロボット単体からは見通しが悪いところであっても人の位置をリアルタイムに把握することができる。 長谷川氏はこの環境を利用した実験の例を示した。TMSを使って屋内ではロボットが外出時の衣服や靴の取り揃え、屋外では車椅子ロボットによる迎車実験などを行なっている。なおこれらのデモの模様も本誌では過去にレポートしているので合わせて参照して頂きたい。またそのほか、患者が受付にカードを出すとその日のスケジュールがロボットに伝えられて、診察室そのほか決められたルートをまわっていくという実験の様子などを示した。 今後は、経済産業省「次世代ロボット知能化プロジェクト」で活用され、「施設内生活支援ロボット知能の研究開発」、ならびに「環境情報を共有するロボットGISに関する知能モジュール群の開発」で用いられる。国土交通省の「インテリジェント基準点(基準タグ)」の活用、ロボットに必要な地理情報の提供「ロボット用WebGIS」などを研究していくことで、さらに研究開発を行なっていく。なおロボットタウンの実証実験施設公開は福岡市と連携して行なっている。
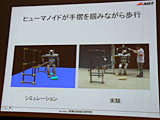
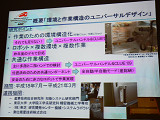
独立行政法人産業技術総合研究所空間機能研究グループ長の大場光太郎氏は「物体操作計測プラットフォームとディペンデンダブルシステム」として先日公開したばかりの神奈川プラットフォームについて報告した。ロボットは多くの場合、特定の場所で特定のロボットを使うことを想定してつくられている。それに対して環境構造化は「異なるロボット、異なる環境、異なる作業において再利用することを想定したインフラ設計」である。神奈川環境プラットフォームではロボットにも人にもやさしいユニバーサルデザインを導入している。なおディペンダリビリティとは、たとえ一部が壊れても安定して動く、安定性の高いシステムのコンセプトである。 ロボットとしてはオランダ製のiARMと電動車椅子を組み合わせて、自動+半自動モードで動かせるようにし、東芝製の多指ハンドロボットでも同じことができることを、実機とOpenHRP3でのシミュレーションで確認した。実験内容や技術の中身については本誌過去記事「神奈川環境プラットフォーム」見学会をご覧頂きたい。
このあと「タスクフォース専門委員からの提言」として東京大学教授の新井民夫氏は「自動車の歴史ではさまざまな支援が社会からあった。技術が社会に受け入れられるのは支援があってこそ。支援と適切なコンペティターとのバランスが重要になる。またロボットの場合、利用者からの過大な期待を調整し、高度な利用者に良い利用者、良い消費者になってもらうことが必要。そのために重要なのが共通プラットフォーム。見かけは地味だが今後が重要。皆さんに是非とも使っていただきたい。まずは我々人間が慣れることだ」とコメントした。 早稲田大学教授の藤江正克氏は、「ロボットがモノになってくれないと困るという声が強い。これからはロボットを使おうというところにシフトしている。今までのロボットの開発は使ってもらう人との組み合わせができる人だけが行なっていた。だがこれから、誰が行なっても利用できるものになる」と述べた。 また新井氏とは違って「私は、ロボットをすぐに使えるようにしたいなという気持ちが強い」とコメントし、「日本に4カ所も拠点ができた。今後も維持できるし、アクセスすれば使える形になったこともこれまでのプロジェクトと違う。これからいろんなロボットが出てきて、ここで実験すれば使えることを示せるようになった。少なくとも気軽に使える状況になることは間違いない。これがうまくいくかいかないかはロボットがうまくいくかいかないかと同じ。難しいことを考えている人がロボットをつくりましたという観点のプロジェクトではないということをご理解いただきたい」と述べた。
● 各省の次世代ロボット研究開発施策の紹介 府省連携がテーマのこのシンポジウムでは、各省の次世代ロボット研究開発施策の紹介も行なわれた。こちらも、別々に行なわれているロボット関連施策を通して眺めるためにも、本誌過去記事を合わせて参照しながらお読み頂ければ幸いである。
まず総合科学技術会議事務局 参事官付の堀俊夫氏が内閣府の取り組みについて紹介した。いまは2010年度までの第三期科学技術基本計画が中間まで終わった段階にあたる。ロボットは、第三期科学技術基本計画、長期戦略指針「イノベーション25」、双方においてそれぞれ推進されている。基本的に各省で開発されてきた技術を連携するというのがこの連携施策群の目的である。詳細は本誌過去記事をご覧頂きたい。
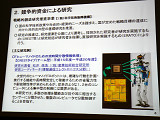
経済産業省 製造産業局 産業機械課 課長補佐の是永基樹氏は、ロボット技術開発の背景について、中長期的には人口減少と高齢化、それに伴う地域間格差の拡大、国際競争力の減少などがあると解説。労働力補足、生活の質向上、製造業の蓄積活用ということで、ロボットが期待されていると述べた。今まではロボットを作ることが中心にあったが、これからは実用化が課題となっているとした。 是永氏は経済産業省の技術開発マップを示し、「次世代ロボット連携群」では3つのロボット開発プロジェクトを行なっていると紹介。リハビリ支援、自立動作支援、介護動作支援を行なうロボットを開発する「人間支援型ロボット実用化基盤技術開発プロジェクト、画像認識・音声認識・運動制御用デバイスの3パーツを開発する「次世代ロボット共通基盤開発プロジェクト」、7テーマを設定して絞り込み評価方式で開発を進めている「戦略的先端ロボット要素技術開発プロジェクト」だ。 今後の政策については、人材が絶対的に不足する時代に突入する。生活支援ロボットのニーズが高まっているが、人との接点が多くなるため安全性が必要になる。だが対人安全技術が未整備であるため、民間ではなかなかリスクが高く技術開発も実用化も難しい。いっぽう海外では、使わなければ課題も分からないという考えで、とにかく実証をやっているような状況だそうだ。生活支援ロボットの実用化プロジェクトを平成21年度から始める予定だ。 ビジネス振興という視点では、年に1度の「今年のロボット」大賞、「次世代ロボット安全性確保ガイドライン」の策定、「ロボットビジネス推進協議会」の支援などを行なっていると紹介した。ロボットが将来世の中に出て行くためには、使う人の技能が非常に重要になる。そのためには人材育成が必要であり、何よりもロボットを実際に見せていくことが重要だと考えて、タカラトミー「i-SOBOT」に「今年のロボット」大賞を与えたという。
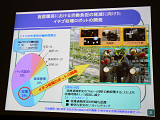
総務省 情報通信国際戦略局 技術政策課 研究推進室室長の森孝氏は、今回発表があったネットワークロボットについて、再度概略を述べた。ロボットをどこでも誰でも使えるネットワーク技術のヒューマンインターフェイスとすることを目指して開発を進めている。ロボットに通信機能をつけただけではなく、環境情報を得られるようにしているところがポイントだ。ネットワークロボットインターフェイス仕様については3月にまとめる予定であり、ネットワークロボットフォーラムは社団法人日本ロボット工業会と連携し、ロボット用位置情報の仕様についてOMGへ標準化提案を行なう。 またネットワークロボット技術は「ユビキタスネットワークソサエティ(UNS)研究開発戦略プログラム2」のなかの革新的技術の1つとして位置づけられている。総務省では来年度からは「高齢者・障害者のためのユビキタスネットワークロボット技術の研究開発」が始まる。そこでは今回開発されたロボットプラットフォームをサービスレベルまで考えて実用化を目指す。受託研究機関は国際標準化も含めて行なうことが義務付けられるという。ちょうど公募が始まったところである。
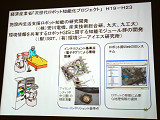
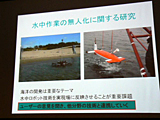
文部科学省 研究振興局 基礎基盤研究課 課長の大竹暁(さとる)氏は、文部科学省の施策の成果の紹介として、理研バイオミメティックコントロール研究センターの視・聴・触・嗅覚を持つ抱き上げロボット「RI-MAN」、CRESTで推進した「ヒューマノイドのための実時間分散情報処理」の研究、ERATOで推進中の「浅田共創知能システムプロジェクト」のほか、グローバルCOEとして進めている「サイバニクス:人・機械・情報系の融合複合」(筑波大学)、早稲田大学の「グローバルロボットアカデミア」ほかを紹介した。 教育面では、若い世代を対象にしたプロジェクトとして、JSTを通じて行なっている「スーパーサイエンスハイスクール」における科学技術・理科学習の推進、ロボット関連の学習の支援、スーパー専門高校などを例としてあげた。また平成18年度まで進められた「大都市大震災軽減化特別プロジェクト」のほか、宇宙ステーションの日本モジュール「きぼう」のロボットアーム、JAMSTECの潜航探査機「うらしま」などをアピールした。ロボットの活用はさまざまに考えられており、知能の開発など基礎の部分を文部科学省では推進していくと同時に、優れた専門家を育成していくと述べた。
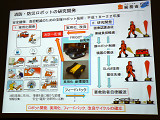
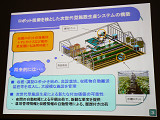
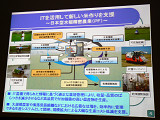
農林水産省 生産局 農業生産支援課 課長補佐 吉田剛氏は、まず農業全体、農業機械を取り巻く状況を解説した。農業就業人口は大きく落ち込みを見せ、高齢化しており、省力化が求められている。就業人口あたりの事故が増えていることもあり、安全面も重要な課題だという。資源を海外に依存している日本においては省エネも必要である。農作物は品目が多く、規模が農家によって全く違う。少量多品目というところに注目しなければ、農業機械はうまくいかないという。吉田氏は開発中のイチゴ収穫ロボットや、次世代型施設生産システムなどを紹介した。 現状の農業ロボットは自律走行型だが、将来はロボットを自立走行させるのではなく、作物のほうがベルトコンベアのように動くということも想定しているという。予期してなかった現場からの声として、人の手にふれることがロボット収穫ではないことから高品質の作物を作れる、そこが新たな魅力になるのではないかといった意見を紹介した。 また、収穫予測によるコンバインの効率的運用ができる収穫計画の自動立案システムなどを考えているという。いま新潟や宮城の一部で実験中だ。作物の質が一定化してくることで大口契約が取れるようになるそうだ。今後もIT農法とロボット技術を融合することで、より商品価値の高い農業システム実現を目指すという。農業ロボットに関しては本誌では「第31回神戸RT研究会「農業用ロボットの開発と生物機能の有効利用」、「進展するロボット化技術と農業機械の開発改良」セミナーレポートなどに詳しい。
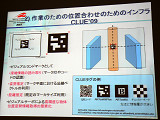
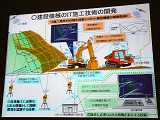
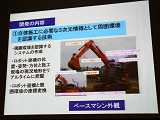
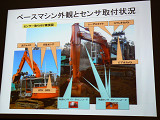
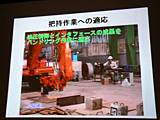
国土交通省のロボット技術関連施策については、独立行政法人 土木研究所 技術推進本部 先端技術チーム 主席研究員の山元弘氏と、独立行政法人 港湾空港技術研究所 施行・制御技術部情報化技術研究チーム研究官の平林丈嗣(たけつぐ)氏が発表した。現在の土木機械はGPSやレーザーレンジファインダーを使ってかなりの作業を指令どおりこなすことができる。たとえば法面を誤差5cm以内で削るといったこともできる。山元氏は「IT施工システム」や「情報化施工推進戦略」について講演。2010年度末までに建設機械の自動機能を向上させることを目指す。今後は実験場内の土ではなく多様な土質条件でも掘れるかどうかをさらに研究開発していくという。土木・建設機械のロボット化については「ロボット化する建設機械の可能性」などをご覧頂きたい。
● ロボットサービスコンテンツとは
また、日本は多くの人がロボットに期待している。ユーザーのレベルも高い。産業用ロボット同様、これからのロボットもユーザーが作っていくことになる。ロボットの本質的な役割は3つあり、「人の役に立つ」、「人を構成論的に知る」、そして「人を元気付けること」だと述べた。ロボットならば理科離れではなく「理科回帰」を狙えるとし、これらの分野に大いに投資をするべきであると語った。そして最後に、今後このプロジェクトの成果は「情報通信プロジェクトチーム」のもと「次世代ロボット研究推進委員会」が引き継ぐ、とまとめた。 なおこのシンポジウムでは他にも、早稲田大学理工学部教授の菅野重樹氏、トヨタ自動車株式会社理事パートナーロボット部の高木宗谷氏、早稲田大学創造理工学部総合機械工学科教授の藤江正克氏の3氏による特別講演も行なわれた。そちらは別記事で別途レポートする。 ■URL 総合科学技術会議 科学技術連携施策群 http://www.jst.go.jp/renkei/ ■ 関連記事 ・ 「ユニバーサルデザイン・ウィズ・ロボット」とは? ~次世代ロボット連携群「神奈川環境プラットフォーム」講演会レポート(2009/02/10) ・ 次世代ロボット共通プラットフォーム技術の現状は? ~「次世代ロボット連携群」講演会レポート(2007/09/20)
( 森山和道 )
- ページの先頭へ-
|