記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
第31回神戸RT研究会「農業用ロボットの開発と生物機能の有効利用」 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
神戸市は「元気な産業のまち」の実現と、ロボット王国神戸をめざし「神戸RT構想」を推進している。神戸RT構想の中核機関として、2002年6月にNIRO「神戸ロボット研究所」が設置され、産官学民の連携により、医療、福祉・介護、レスキュー分野を中心としたロボット研究を続けている。2002年7月に発足した神戸RT研究会では、研究者・企業などの講演や、RTの最新情報、活用事例のセミナーを定期的に行なっている。 今回は、兵庫県立中央農業技術センターの主任研究員を勤めた経験があり、農産業用ロボットの開発に従事している土肥誠氏(島根大学生物資源科学部)を講師に招き、「農業用ロボットの開発と生物機能の有効利用」と題して講演を行なった。 最近、食の安全を考える側面から自給率アップや、地域活性化のための農商工連携という切り口で農業がクローズアップされている。土肥氏は、RT技術で現代農業が抱える問題を解決しようと、農業用ロボットの研究開発をしている。 整った環境の中で稼働する産業用ロボットと違い、不確定要素が多い中で稼働する農業用ロボットは開発が非常に難しい。そのためさまざまな研究がされても、商品化には結びついていない現状がある。土肥氏は、これまでの研究成果や農業用ロボットが持つ問題点を紹介した。 ● 農業用ロボット研究開発の背景 日本は食糧自給率が低いことが問題になっているが、その中で米はほぼ100%の自給率をあげている。「これは、機械化が進んでいるからだ」と、土肥氏はいう。稲作用の農業用機械はトラクターやコンバイン、田植機などが普及している。もし、これが手作業に頼った辛い作業のままだとしたら、米もこれだけの自給率を確保できないだろうと指摘する。最近、機械の知能化・ロボット化が進み、福祉や災害救助といった方面にもロボットの実用化が期待されている。ならば将来的には、農業分野にもロボットが活躍するようになるかもしれない。とはいうものの、ヒューマノイド型ロボットが人と一緒に協働作業をするというのは、課題が多すぎて実現が難しいだろう。ただ、農薬散布に代表されるような作業者の健康面に影響するような作業、危険な作業をロボットにやらせたいというニーズはある。 ただ農業の場合は、周囲の環境が刻々と変わり、作物の形状も個々で異なるという難しさがある。そのため「まず農作業のノウハウを蓄積していくことが、開発の初期段階には必要」と土肥氏は考えているそうだ。
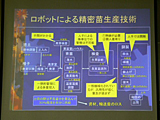
農業用ロボットの研究は、「機械化が遅れている作業分野」「既存農業機械の自律化」「施設園芸・調整出荷の自動化」という3つの分野で進んでいるという。 土肥氏は、1つ目の「機械化が遅れている作業分野」をターゲットに研究をしている。これは地域性というのもあるそうだ。西日本では、どちらかというと小規模な農地で地域特性を活かした作柄や作物を生産している。また、山間地域など山や棚田で農業をしているケースが多い。 それに対して、2つ目の既存農業用機械を自律走行させる研究は、北海道や東北などの大規模農業が盛んなところで進んでいる。かつては、アメリカや欧米の農業に近いような形態で、大量の肥料や農薬を撒くタイプの農業をしていた。近年は、環境破壊や安全性の反省があり、必要なところに必要な分の資材を投入し、環境を破壊せずに生産量を維持しようという流れになっている。 そのためにトラクターや田植機という機材にGPSやGIS(Geographic Information System:地理情報システム)を搭載し、リモートセンシング技術を使いどの位置にどれだけの肥料を蒔き、収穫の時期を判断し最良の収量を得るような研究をしようという考え方だ。 3つ目は施設園芸の高度化や自動化で、植物工場のような施設で無農薬で効率的な食糧生産、安全な食糧生産ということを目指している。農業用ロボットシステムの開発は、こうした3つの方向性で研究されている。
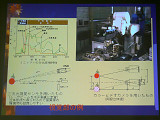
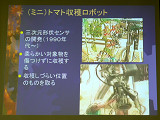
● 作物収穫用ロボット 世界初の農業用ロボットは、1980年代に京都大学で開発された「トマト収穫ロボット」だそうだ。これは1つのカメラを移動してステレオ画像で赤いトマトを見つけて収穫するロボットだった。農業用ロボット開発のポイントとなるのは、作物の形状が複雑なだけでなく個体毎に差異があるという点だ。トマトを収穫するためには、茎や葉の中から赤く熟した収穫できるトマトを見つけなくてはならない。大きさが異なる柔らかい実を傷つけないように、柔軟なハンドが必要となる。 このロボットには、いくつかの問題点があると土肥氏は言う。トマトのように房にいくつも実っているものは、ステレオ画像方式の位置認識では奥行きが分かりづらく、どれを対象としているのか判断が難しいそうだ。 また、トマトならば“赤”という色を情報にできるが、これがキュウリのように茎も葉も実も緑色では、対象物の選定ができない。そこでキュウリに対しては、LEDやレーザー光をあててPSDセンサーで農作物の反射分光特性により、収穫に適した果実を選別するという実験もしている。センサーの開発により、こうしたことも技術的に可能となってきた。
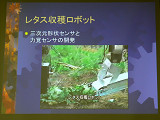
似たような作物を1つのロボットで収穫できればロボットの稼働効率がよくなる、と考えて設計したのが「レタス収穫ロボット」だ。キャベツやレタス・白菜などを対象としている。これは鏡にレーザー光をあてて生えているレタスを走査し、形から収穫できるサイズになっているかどうかを判断する。 ただ、こうした野菜は大きくなっていても、中がスカスカの状態でまだ収穫するには早すぎるということもある。また、レタスは逆に中身が詰まり過ぎていても美味しくないため市場性がない。農家の方は見た目だけでなく、レタスを触った感触で収穫に適しているかどうかを判断しているそうだ。 そこで、このロボットはハンドの先端に力覚センサーをつけて、レタスを軽くポンっと叩いて硬さを確認してから収穫するシステムになっている。このように農作業の場合「作物を見つける」「収穫時期かどうか判断する」という選択的な作業が必要になる。
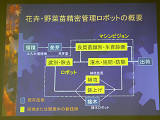
このように、野菜を収穫するロボットをいろいろと研究してきた。「しかし収穫作業をロボット化するのは難しい」と土肥氏は言う。 最近もイチゴの収穫ロボットがニュースになったことがあるので、ご覧になった方もいるだろう。しかし、これが農家の方に受け入れられるかというと、非常に難しいと土肥氏は指摘する。というのは、イチゴやプチトマトはヘタが取れただけで、商品価値がなくなってしまうからだ。ヘタを食べるわけではないが、店頭に並べる商品としてはヘタが必要なのだ。消費者の意識は食糧確保や安全性だけにあるのではないため、生産者としては作物の仕上げになる収穫作業をロボットに任せるのは不安が生じる。丹誠込めて育てた作物が、もし収穫の段階で20%のロスが出たとしたら、がっかりしてしまうだろう。 もう1つ生産者のメンタリティの問題もある。収穫作業は、全農作業の1/3~1/2を占めるくらい労働時間として長く、かつ重労働だ。しかし、それでも農家の方にとって、収穫作業には喜びが伴う。収穫作業が大変だから全てロボットにお任せとなってしまったら、作物を育てる喜びや充足感が薄れてしまうのではないか? “来年もまたいい物を作ろう”という気持ちが保てなくなってしまうのではないか? と土肥氏は懸念を示した。 ● RT技術でコスト削減「花卉・野菜苗精密管理ロボット」 そういう点から考えて、土肥氏は収穫以外の作業にも目を向けるようになったという。稲作には「苗半作」という言葉があるという。苗の出来で、その年の作柄が半分決定してしまうという意味だ。田んぼに植えてから天候に影響されるのは仕方がないが、苗の善し悪しは作り手次第ということだ。 「ならば、100%いい苗だけ揃えて出荷できるような育苗システムを作れば役に立つのではないか」と土肥氏が取り組んだのが「花卉・野菜苗精密管理ロボット」だ。
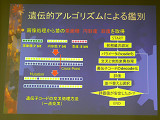
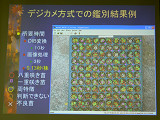
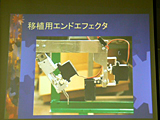
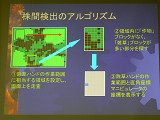
これは、新苗の品質を判断して不良苗を抜き取り、補填して鉢上げするシステムだ。土肥氏は、苗を生産する中でも一番難しいと言われている花、ストックを対象とした。 ストックの何が難しいかというと、八重の花と一重の花が混在していて、種を見ただけでは判断できない点にあるそうだ。そのまま畑に植えてしまうと、50%の確率で出荷できない一重の花が咲く。それでは非常にコスト効率が悪い。 篤農家と呼ばれる農業におけるエキスパートの人は、ストックが発芽して10日頃に葉の長さや色で八重咲きの苗を判断できるという。土肥氏は彼らの協力を得て、画像処理で葉の大きさや色・形を判別し、遺伝的アルゴリズムで判別の精度をアップさせる仕組みを作り実験した。 万が一、畑に一重の花が混ざると困るため、篤志家の方も一重咲きか八重咲きか判別が難しい時は“疑わしきは除外”で取り除いているそうだ。これはかなり基準が厳しいそうで、仮に100%八重咲きの種子があったとしても、苗を見て確実に“八重”と判断できるのは20~30%だという。つまり最低でも70%の種を無駄にしている計算になる。 結果を述べると、土肥氏が開発したシステムでは、91%くらいまで八重咲きを見分けることができるようになり大幅なコスト削減に繋がるという。 また、ピンセットのような形状の移植用ハンドで、不要な苗を除去した後にいい苗を補填したり、いい苗だけを大きな鉢に移植するロボットも作った。この時、植え付け時の深さを調整しないと、根づかずに枯れてしまうため、小さくて傷つきやすい苗を丁寧に扱い正確に移植する必要がある。「この作業を1,000株やったら、人ならイヤになってしまうだろうけど、ロボットなら黙々と働いてくれる」と、土肥氏はロボットならではの利点をあげた。
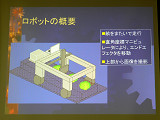
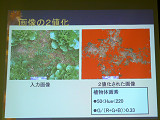
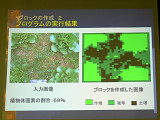
● 農作業の移り変わりとRT技術の活用 農業用ロボットが実用化しづらい問題点として、季節性が非常に大きいということが挙げられる。稲作を例にすると、4月に種まき、5月に田植え、9~10月に収穫と季節によって作業内容が変わる。そしてそれぞれの作業をする期間が非常に短い。先ほども述べたように、米は田植機があるから高い自給率を確保できているが、農家にとってみれば田植機は年に1週間しか使わない、コンバインは10日間しか使わないという状況で、機械を利用するコストが高い。このような季節性がある作業にロボットを導入する場合、どう対応していくべきなのか考える必要がある、と土肥氏はいう。 もしロボットのプログラムやハンドを替えることで、いろいろな環境や作物へ柔軟に対応できればメリットがあると考えて、草抜きや苗の移植、収穫など1年中使用できるロボットを研究開発した。それが、先に紹介したレタスの収穫ロボットだ。共通プラットフォームでハンドやソフトを替えることで、複数作業が可能になる。 土肥氏は、白菜の苗を植えた畑で草取りをする様子を紹介した。単に画像を二値化するだけでは、苗も雑草も緑色なので判別が難しい。そこで畝(うね)をブロック指定することで、苗と雑草を識別している。ロボットは畝をまたいで走行し、上部から画像を撮影して苗と雑草を見分ける。直角座標マニピュレータでエンドエフェクタを移動、耕耘機の爪のようなぎざぎざしたハンドを回転させて草引きをする。
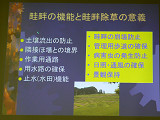
この草取り作業が、農家の方々にとって大変な作業であることは言うまでもない。最近は特に安全性の面から減農薬だったり除草剤を使わない傾向にあり、農家の方々は雑草との戦いといった状態になっているそうだ。草取りには収穫のような喜びがないため、本当に辛い作業になると土肥氏はいう。 畑の草引きだけではなく、棚田などの畦(あぜ)に生える雑草の問題もある。こうした畦には、土壌の流出を防ぎ用水の確保、作業通路という重要な機能がある。しかしここに雑草が茂っていると病害虫発生の巣になり、作物への影響や日当たりの悪化という問題が生じるため、草刈りをしなくてはならない。 これは、不安定な地形での作業のため危険が伴う。先日も、ため池の畦の草刈りをしていたお年寄りが足を滑らせて、池に転落して亡くなったという事故がニュースであったという。土肥氏は、畦を走行し草取りする装置を研究開発中だという。
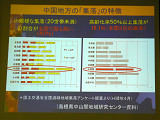
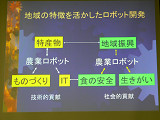
土肥氏は、このようにいろいろな農作業用ロボットの研究開発を行なってきた。その背景には、食の確保や安全を考え、今ある生産基盤が崩壊しないように、単に雇用確保だけではなく技術的なサポートで崩壊を防衛していくことが重要だという考えがある。 「農家の高齢化が進んでいるが、生産者の方達の多くは動けるかぎり農業に携わりたいと言っている」と土肥氏はいう。しかし現実には体力的にきつかったり、危険な作業があったりしてできないこともある。今後、高齢化が進み限界集落化する前に、RT技術でサポートし対策していかなくてはならないと、土肥氏は述べた。 その時に大切なことは、一口に農業と言っても、地域によって環境が異なり、それに伴って作業内容も要求仕様も大きく違うという点だ。広い畑が多い北海道と、中国・四国のような山間地域では、農業のあり方も作物も違う。それぞれ地域に根付いた作物があり、地域独特の技術がある。農家の方々が生産者として生き甲斐を持って働くことができるよう、地域の方々の意見を伺いながら研究開発をしていきたい。農業用ロボットが実用化され、食の安全や地域社会振興という面の社会貢献もできたら嬉しく思う、と土肥氏は語った。
■URL 新産業創造研究機構(NIRO) http://www.niro.or.jp/index.php
( 三月兎 )
- ページの先頭へ-
|