記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
「第12回 ロボットグランプリ」レポート【大道芸コンテスト編】 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3月28日(土)と29日(日)の両日、 東京・江東区の日本科学未来館において「第12回 ロボットグランプリ」が開催された【写真1】。主催は日本機械学会 ロボティクス・メカトロニクス部門。本イベントは、日本機械学会の100周年記念行事として1997年からスタートしたロボット競技会だ。ユニークなアイデアを競いあう「大道芸ロボットコンテスト」や、槍騎兵 (ランサー)の自律型ロボットによる競技会、ピンポン玉などの回収能力を競い合うスカベンジャーロボット競技会が2日間にわたり開かれた。 初日は大道芸ロボットコンテスト決勝戦が催され、15組の個性的なロボットがアイデアを競い合った【写真2】。この競技には、コンピュータ制御によって芸を演じる「コンピュータ制御部門」と、重りやバネなどの機械的な動力を利用する「からくり部門」がある。いずれもテーマは自由だが、ロボットの独創性、楽しさ、芸術性などが評価される。通常のロボット競技のような決められた目標はなく、ロボットに芸をさせて、いかに観客に楽しんでもらうかがポイントだ。そのため逆にコンテストとしては難しい側面もあるが、それが大道芸ロボットの醍醐味でもあるようだ。以下、学生たちが知恵を絞りあった技術の結晶を部門別に紹介しよう。
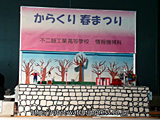
● 日本の伝統技術を受け継ぐ「からくりロボット部門」 まず、からくり部門のロボットから見てみよう。からくりの場合は、電気を利用しないため、駆動系や制御系での制約が大きい。とはいえ、カムやクランクなどの機械要素を駆使すれば、かなり面白い動作を実現できるだろう。ただし今回は参加チームが2つだけで、少し寂しい気がした。ぜひ来年はもっと多くのチームが参加してほしいところだ。・からくり春まつり(不二越工業高等学校 情報機械科) 不二越工業高等学校は、あでやかな日本の春まつりの風景を再現するからくりロボットをつくった【写真3】。巻き取りバネを手動ハンドルで回して引き伸ばし【写真4】【写真5】、その収縮力によってリンク機構などで構成される人形を動作させる仕組みだ。バネ収縮に伴って、水平方向に人形がスライドするほか、太鼓をポンポンと叩いたり、桜の木が回転して開花したり、背景がパッと変化するなど、仕掛けが満載だ【動画1】。バネの力は、自転車用発電機の回転にも利用され、発生した電気は点滅するLEDの発光用に用いられている。伝統的な日本のからくりを再現した、高校生らしい秀作だった。
・スーパーマリヲユビキタス(電気通信大学ロボメカ工房) 電気通信大学は、某社のゲームに似た!? キャラクター「スーパーマリヲ」が登場するゲームロボットを製作した【写真6】。このスーパーマリヲを操作し、回転する障害物をジャンプしながら倒していくと、得点が与えられるというルールだ。スーパーマリヲのジャンプは、手前にあるボタンをタイミングよく押して操作できるが、ボタンの強弱によってジャンプ量も変化する仕組み【動画2】。また回転テーブルの速さや方向は、手前にあるレバーを倒して調整する。実は回転テーブルはロボットの背後にいるスタッフが手動で回している。この黒子にレバー操作が機械的に伝わるようになっており、その指示がくると黒子が人的に回転方向を変える手順だ【写真7】。参加型ゲームということもあって、審査員の子供たちの人気も高かった。
● 芸達者なロボットたちが揃い踏み~「コンピュータ制御部門」 次に「コンピュータ制御部門」に登場した芸達者なロボットを見てみよう。こちらの部門は合計13チームがエントリー。自由な発想でつくられた楽しいロボットが多く、見ごたえも十分だった。・タカユカ!?(金沢工業大学) タカユカ!?は、冬から春に変わる美しい季節の移ろいを表現した、金沢工業大学の作品だ【写真8】。中央の回転テーブルに載ったロボットが笛を吹く動作をすると徐々に春に近づいていき、雪に見立てた綿が落ちたり、花や草が回転して現れたり、周りにあるウサギやニワトリなどの動物たちが登場して動き出す仕掛けになっていた【写真9】【動画3】。ロボットはシーケンス的に時系列で制御をかけているという。また絵が描かれた背景の布地は電磁石で挟んであり、冬のカーテンが落ちて春の絵柄へと変更できる機構も取り入れていた。かなり大掛かりな作品で、重量を抑えるために、できるだけ軽い素材を利用したり、可搬性を考慮して分割・組み立てが行なえるような工夫を凝らしたという。
・魔術師ロボット(中京大学 情報理工学部 機械情報工学科) 中京大学 情報理工学部 機械情報工学科も本大会が初出場となるチーム。同チームの作品は魔術師ロボット【写真10】というアイデアが光って面白かったが、当日のデモはロボットアームのモータ回路にトラブルがあり、完全に動作しなかった点が残念だった。もしスムーズにロボットが動いていれば、次のような流れになる予定だったという。まず中央に置かれたテーブルにコップが3つ置いてあり、その1つにボールが隠れている。それを子供たちに確認させてから、ロボットがコップをゆっくりシャッフル。そして物が入っているコップを子供に当てさせると、不思議なことに別のコップにボールが移動しているというシナリオだ。 実はコップを置くテーブルに仕掛けがあり、テーブルに置かれたボールが下に引っ込んで入れ替わる構造になっていた【写真11】。また最後にすべてのコップからボールが消えて、ロボットの口からボールが連続して飛び出してくるというシナリオも考えた。うまく成功すれば、子供たちの心をがっちり捉えていたと思われるが、今回はロボットの頭部だけの動作にとどまった。ぜひ来年は完全に動いているところを目にしたい【動画4】。
・ゲーセンクエスト(電気通信大学) 電気通信大学の「ゲーセンクエスト」【写真12】は、ゲームセンターのUFOキャッチャーを舞台にしたロボットだ。残念ながらトラブルのため一部の機能しか動かなかったが、内容は参加型のファンタジーで、観客の選択によってストーリーが分岐し、人形たちが別世界の冒険をするというものだという。 UFOキャッチャーで人形を落とすと【動画5】、その人形は別世界にワープして、冒険の旅に出かける。移動した別世界では、骸骨が踊るなど【写真13】、不思議なことが起こるそうだ。さらに、いくつかの場面が回転して切り替わり、最終的に人形が元の世界に戻ってくるというストーリーだという。こちらのロボットも完全稼動を目指し、来年に期待したい。
・マネージャーのフランソワーズたん(東京工業大学 工学部 機械宇宙学科) 個人的に大爆笑だった作品が、東京工業大学の「マネージャーのフランソワーズたん」だ。野球部のマネージャーがキャッチボールで特訓してくれるロボット【写真14】なのだが、この子の性格がツンデレなのだ! 子供にツンデレの意味が分かるかどうかは別として、「ツンデレ萌え~」の人にとっては堪らないキャラだろう。日本独自の感覚として、「カワイイ」に次ぐ文化として、今後世界に発信されるかもしれない。ちなみにマネージャーの顔は液晶ディスプレイ【写真15】で構成され、そのCGは絵のうまい学生が描いたものだという。 デモでは、フランソワーズたんがボールを投げて、相手側がキャッチしてボールをミットに投げ返す。ミットにはマイクロスイッチが内蔵され、ボールが当たるとロボットが反応。たとえば、うまくボールがミットに入れば、フランソワーズたんは「うまいじゃない!」とほめてくれる【動画6】。逆にボールが一定の時間内に返ってこないと罵倒!? されるという具合だ。状況に応じて顔やセリフが変化するので、うまく同期をとって全体を制御することが難しかったという。またアームを回してボールを投球する際の微調整に時間が掛かったそうだ。ボールを連続で投げる強化訓練モードや、最後にスポーツドリンクをくれるツンデレモードがあったりと、笑いを誘う演出が満載で、大変面白かった【動画7】【動画8】。
・N@lus(静岡大学 ロボットファクトリー部) 静岡大学は、人が座ろうとすると逃げ回る楽しいイスロボット「N@lus」【写真16】【動画9】を製作。一見すると地味に見えるが、複数のセンサーを利用し、技術面での工夫が凝らされていた。プレゼンターの腕にあらかじめ超音波発信機【写真17】を付けておき、最初に超音波をキャッチするとイスロボットが近づいてくる。さらに距離センサー(赤外線センサー)も搭載。こちらは人がある程度の距離までイスロボットに接近すると、それを検知して逃げまわるように機能するもの【写真18】。またプレゼンターがイスを無理やり捕まえて座ろうとすると、怒って背後に搭載されているハンマーが下りて頭を叩くという仕掛けもあった【動画10】。 駆動部にはハーモニックドライブギアとDCモータを採用しており、実際に人が座った状態でも移動できる耐性とトルクをもっているという。コントロール系にはH8とPICマイコンを利用し、前者でセンサーの処理を、後者で駆動系の処理をしているそうだ。コンテストの趣旨から外れるだろうが、逃げるイスという発想を真逆にすれば、福祉機器など実用面でも十分に活躍が期待できそうだ。
群馬県立太田工業高校は、ビニール袋でつくられたユニークな歩行エアロボットを出展していた【写真19】。バルブを制御してビニールに圧縮空気を送り込み、足を変形させながら歩行させる仕組みで、歩行パターンをパソコンで制御し、前進・後進するためのアクチュエータも装備している。アイデアは大変ユニークだったが、残念ながら今回のデモまでに製作が間に合わなかったようだ。ぜひ来年は実際に動くところを見てみたい作品だ。 ・SURL(信州大学) 信州大学の「SURL」【写真20】も筆者が個人的に感動した作品の1つ。これは大道芸という意味で、まさにドンピシャのジャグリング・ロボットだった。このロボットには、2本のアーム【写真21】があり、さらにそのアーム両端に光のトーチを装備した回転機構がある。それらが自在に高速回転することで、美しい光の軌跡を描けるようになっている。アームの駆動にはDCモータを利用し、複数のPICマイコンで制御を行なっている。アームには直交するマーカーが張ってあり、それをフォトインターラプタで検出し、90度ごとに位置決めを行なっているそうだ。 チームメンバーは全員がジャグリングサークルに所属。デモでは全国大会に入賞した経験をもつメンバーがロボットと共演した。高速に動くロボットアームの軌跡を見ながら、シンクロする芸術性の高いパフォーマンスを見せてくれた。共演者はこの演技のために1日12時間以上も練習を重ねてきたという【動画11】。またロボットだけでなく、トーチにもPICマイコンが搭載されており、光の色が変化したり、細かい演出も見られた【写真22】。メディアアート分野では、この手の作品もあるようだが、機械と人のコラボレーションまで含めて考えれば、「ロボットアート」という新領域が拓けそうな気がする。子供だけでなく、大人も楽しめた作品だった。
・MECHA沢新一(16)改:ヨーヨー特化型(東京工業大学 工学部 機械宇宙学科) 東京工業大学は、ハイパーヨーヨーのデモを行なうユニークなロボットを紹介【動画12】【動画13】。これは、ヨーヨーの動作をすべて機械的に模すのではなく、一部を映像として見せ、アームとの動作を組み合わせることで芸を披露するもの。ロボット前方に置かれたプロジェクターで、ロボットのボディに映像を投影し、途中から機械的なアームの動きと連動する形だ。制御系には同大学で開発されたロボット専用小型システム(TITech Wire)が用いられており、AD、DA、デジタルなどのIOモジュールと通信し、データの収集やモータ制御の指令を出せる。 アーム部は、動作をよりダイナミックに見せるために、一般的なモータ制御だけでなく、ヨーヨーを自由落下させる工夫も取り入れたそうだ【写真23】【写真24】【写真25】。このほかカーテンレールを利用した簡易スライド機構や、かわいいドコモダケのキャラクターなど、細部にわたる演出も良かった。今回のデモでは披露されなかったが、口から煙(冷却スプレー)を吐出する機構も備えていた。技術的にいろいろな仕組みが盛り込まれた高度な作品という印象だった。
・SLR(香川大学) 「SLR」【写真26】は香川大学の作品。ご当地の名物「讃岐うどん」をテーマにした楽しいロボットだ。3つのロボットがあり、生地を切って(実際に切るのではなく、切る動作をする)【写真27】、うどんを釜に運び、茹で上げ、湯切りをしてから取り出し【写真28】、汁を入れるまでのプロセスを表現【動画14】。うどんを切ったあと、それを磁石のついたヒモで巻き取りながら、釜のほうへ搬送する。 うどんを取り出す機構は、ソレノイドの可動鉄心でハンマーを止め、電気が流れると鉄心が動いてストッパーが外れて、開放されたハンマーが下に落ちる仕組みだ。そしてハンマーの力でテコを押し、勢いよくうどんを飛ばす。ここでうどんをうまく受け取るために、微妙な調整が必要だという。また何回もこの部分を動かしていると、金属疲労でメカが壊れてしまうことがあり、けっこう苦労したそうだ。うどんをつくるロボットという発想がとてもユニークで、子供たちも興味津々の眼差しで見ていたようだ。
・TEAM HOG(千葉工業大学) 千葉工業大学は、自作の車輪型ロボット「TEAM HOG」【動画15】を紹介した。全員1年生のチームで、ロボットの自作は今回が初挑戦だという。このロボットは特にハード面を重視し、イタリアンマフィアをイメージしたスマートなデザインを目指したという。自分たちで型をつくり、FRP樹脂(繊維強化プラスチック)でヘッドやカバーなど、曲線のある造形にチャレンジ。外観に大きなこだわりをみせていた。制御系にはH8マイコンを採用している。複数のモーションを組み合わせて動作させる仕組みだが【写真29】、将来的にはすべての動作を自律制御できるようにしたいそうだ。本番のデモでは、演出のために付けたボディの布が歯車に食い込んでしまうトラブルが発生し、思いどおりに動かなかったようで残念だった。ぜひ来年に期待したい。
・VRチーム(電気通信大学 ロボメカ工房) 電気通信大学は、バーチャルリアリティの技術とロボットを組み合わせた新感覚のゲーム「ウサギさんのにんじん畑」を紹介していた。プロジェクターから映し出される画面には、フィールドを徘徊するブタと複数のニンジンが映し出されている。具体的なゲームのルールは、現実世界のウサギロボットを操作して、ブタにニンジンを荒される前に、これらのニンジンを収穫するというものだ【動画16】。 現実のフィールドでは、ニンジンやブタは見えない【写真30】。これらはCGとして画面上で合成されているからだ。実際にウサギロボットが運ぶ対象は、黒いマーカーが付いたキューブとなる【写真31】【写真32】。 画面上でニンジンなどのCGを合成するために、AR(Augmented Reality:拡張現実感)研究用のソフトウェアライブラリー「ARToolKit」が用いられている。これにより、カメラで取得した現実世界の映像に対し、どの場所にマーカーがあるのか、それぞれのキューブ座標を把握し、その位置にオブジェクト(ニンジンやブタ)を配置する。基本的に画像処理がメインとなるが、カメラ撮影の際に外乱が入ることがあるため、アルゴリズムにいろいろな工夫を凝らしたという。
・SORR・Y(金沢工業大学) どこかで聞いたことがある!? 「SORR・Y」という名前のロボットを出展していたのは金沢工業大学のチームだ【写真33】。学校教育の一環として4カ月ほどで製作したもので、材料は基本的に廃材を利用し、ほとんどコストも掛かっていないという。発想の原点は、手品を披露するマジックボックスにあるという。ロボットの腹部にあるフタが開き、そこに空き缶を入れると、フタがいったん閉じるようになっている。次にフタが開くと、あら不思議! 先ほど入れた空き缶が潰れた缶になっている。さらに今度は靴を中に入れると、次に出てくるときは靴から花が咲いている。とてもうまい演出をしており、目の肥えた子供たちにも大変ウケていた【動画17】。 そのからくりは、あらかじめ潰れた缶や花が咲いた靴をロボットの内部(頸部)にセットしておくというもの【写真34】。それらをサーボモータで排出口【写真35】に落すことで、フタを開いたときにあたかもロボットが缶をプレスしたり、花を咲かせているように見せるというアイデアだ。センサーはリミットスイッチだけで、機構もシンプルに仕上げている。制御マイコンにはatmel AVRシリーズのATmega32を採用。また浅草技研のサーボコントローラーも利用しているという。ロボットに物を入れて経時的にシーケンシャルな動きをさせる方式を採用したため、プレゼンテーター側で十分にタイミング合わせなどの練習をしておく必要があるそうだ。個人的には、しゃぼん玉を連続で吹いて飛ばす演出が華やかで印象に残った【動画18】【写真36】。しゃぼん玉を量産するために輪を十字状に4つ配置し、連続的にしゃぼんを輪につけながらエアを送っているという。
・ピカピカソ(東京工業大学 工学部 機械宇宙学科) 東京工業大学の「ピカピカソ」【写真37】は、名前から想像できるとおり、似顔絵を描いてくれるロボット。人気ゲームキャラクターの「ピカチュウ」と、天才画家「ピカソ」を合わせたネーミングで、デフォルメされた顔を描くことが可能だ。実際にはロボットが絵を描くのではなく、搭載カメラ【写真38】で人の顔を撮影し、その画像にデジタル処理を施してから、ディスプレイ上で表現するという流れだ【動画19】。 見学者と話をする際には、眉毛、目、口、手などがコミカルに動き、とても親しみがわいた。絵を描こうとすると「燃えてきましたよ~」というセリフとともに、熱い心理状態を胸の炎(布)で表現していた【写真39】。こちらも制御系には、ロボット専用小型システム(TITech Wire)が用いられているという。この作品も子供たちに大いにウケていたようだ。
さて気になる競技結果だが、どれも独自性があり、面白い作品が多く、優劣をつけがたいものばかりだった。このコンテストでは技術面からのアプローチだけでなく、いかにプレゼンをうまく行なって、製作物の楽しさを相手に訴求できるかという点が勝敗を決める大きなポイントになる。両部門とも順位は専門審査員による評価に加え、子供たちの意見も対象となった。子供たちは、面白い作品だと明確に反応が返ってくるので、ある意味ではシビアであったかもしれないが、そのぶん公平性もあり、納得がいく結果となったのではないだろうか。以下に入賞作品を示す。 ■からくり部門 優勝 からくり春まつり(不二越工業高等学校 情報機械科)【写真40】 ■コンピュータ制御部門 優勝 SORR・Y(金沢工業大学)【写真41】 準優勝 ピカピカソ(東京工業大学 工学部 機械宇宙学科) ■そのほかの特別賞 技術賞 マネージャーのフランソワーズたん(東京工業大学 工学部 機械宇宙学科) 創造賞 N@lus(静岡大学 ロボットファクトリー部) 芸術特別賞 SURL(信州大学)
● 産学のユニークな先端ロボットも大集合!
まず目を引いたのが、東京工業大学 機械宇宙システム専攻 広瀬・福島研究室のロボットだ。脚車輪複合型ロボット「Roller-Walker」【写真43】は、不整地でも硬平地でもスムーズに移動できるように、脚型移動と車輪型移動の機構を併せ持っている。最大の特徴は、駆動力を持たない「受動車輪」が歩行機械の足先に取り付けられている点だ。硬平地ではローラースケートで滑る原理と同様にしてスイスイと効率よく推進できる。一方、不整地では足首を直角に回転させ、この受動車輪を足裏として用いることで脚型移動が可能だ。アクチュエータがないぶん、足先が軽量化されており、軽快に歩行する【動画20】。
また「Omni-Crawler」【写真44】も特に印象に残ったロボットだった。通常の平らなクローラーとは異なり、断面が円形で、断面中央に回転軸を持つユニークなクローラー【写真45】を開発。前進・後進しながら、素早く横方向への移動が可能な構造になっている点が大きな特徴【動画21】。これにより、狭隘部に対しても位置決めが簡単に行なえるようになり、パイプ内外での走行面の適応性が向上するという。
中央大学は、ユニークな「ミミズロボット」【写真46】と「カタツムリロボット」【写真47】を紹介していた。ミミズロボットは、ミミズのぜん動運動を模したもので、後方から前方に向かって収縮を伝えることで前進していく仕組み。将来的に月探査、配管検査、医療用検査などのロボットとしての応用を目指しているという。デモでは狭い配管の中を這いながら進む様子を紹介していた【動画23】。 一方、カタツムリロボットもカタツムリの移動方法を応用して動くもので、波動の伝播方向によってロボットの進行方向を決定する。ロボットはサーボモータを搭載した8つの駆動モジュールから構成され、それぞれが平行リンクで連結されている。この駆動モジュールよって、ロボットの形状を変えたり、波の伝わり方を変化させ、全方向に移動することが可能だ。たとえば8つのモジュールの並びを円形にし、4つのモジュールを時計回り方向(CW)へ、また残りの4つのモジュールを反時計回り方向(CCW)へ向かうように波を伝播させると、結果としてロボット全体は直進することになる【動画24】。カタツムリロボットは、接地面積が広いため荒地でも安定して移動でき、傾斜面でも摩擦で走行できるというメリットもある。
東京電機大学 工学部 機械工学科の栗栖研究室は、惑星探査や災害現場などで役立つロボット遠隔操作技術について発表していた【写真48】。オペレーターが周囲状況を把握する際に必要な提示装置や、1台あるいは複数台のロボットでの協調作業を実現する操作装置について検討。研究のために合計24個の関節を備えた作業用6脚ロボット【写真49】を製作し、さまざまな作業に合わせてジョイスティックや3次元ハプティクスデバイス【写真50】を使い分けながらロボットを操作。ロボットは安定した形で歩行できるように、常に重心を保ちながら自律制御される。さらにロボット関節部に取り付けられたセンサー(ポテンショメータ)のデータをパソコンへ取り込み、ほぼリアルタイムで姿勢制御の状態を画面上で表示していた。
サスティナブル ロボティクスは、開発中のツインフレームロボット「HEXA LEGS」【写真51】を展示していた。このロボットは、合計6脚を備えたツインフレーム型のシンプルな歩行移動ロボットで、従来の車輪型ロボットでは難しい段差・不整地での移動を可能にするものだ。3脚×2組のフレームを交互に上下方向に移動しながらスライドさせ、段差がある場所でも簡単に移動できる【動画25】。ロボットの操作は、RS-232C経由で方向・速度のコマンドを指定するだけでよく、あとは接地・接触・傾斜センサーなどによって本体が水平になるように自律制御しながら、さまざまな地形に対応する。
以上、本レポートでは第12回ロボットグランプリの初日に行なわれた大道芸ロボットコンテストの模様と、会場で併設されていた先端ロボット紹介コーナーの展示物について紹介した。後編では、翌日に開催されたランサー競技、およびスカベンジャー競技の模様をお伝えする。 ■URL ロボットグランプリ http://www.RobotGrandPrix.com ■ 関連記事 ・ 「第10回ロボットグランプリ」開催(2007/03/13)
( 井上猛雄 )
- ページの先頭へ-
|