記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2050年のロボット活用社会に向けて |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
「ロボット分野におけるアカデミック・ロードマップ」は、ロボット学会が経済産業省から委託を受けて、人間工学会、人工知能学会と連携して未来へのロードマップを描いたもの。経済産業省の平成19年度技術戦略マップローリング委託事業(アカデミック・ロードマップ作成支援事業)におけるロボット分野アカデミック・ロードマップの改訂等の一環として行なわれた。 まず初めに日本ロボット学会会長の佐藤知正氏が「100人を超える執筆者が2年をかけてまとめられた知識が、無料で入手できるこのセッションは大変お得です」と挨拶し、検討規模やその体制概要を解説した。一昨年度は情報系が過去50年の構造的把握を中心に、工学系が50年後の社会が求めていることを中心にまとめた。本年度は、両者のいい点をとり、過去の50年の構造的把握と、50年後の社会をみすえた展開の記述という、ロボットの100年を描くこととした。さらに本年度は、領域間の融合を主眼としたという。ワーキンググループと統括委員会委員は合計51名、執筆委員は109名。 とりまとめの基本方針として4つ立てたという。「ロボットの将来イメージを示す図の作成」「ロボットの歴史と未来」「過去50年と未来50年の計100年間を示す進化系統図の作成」、そして4つ目が若者に取り組んでもらいたいという「ロボットチャレンジ30」だ。実は、5つ目としてとりまとめた結果を出版するこというのもあったが、報告書が分厚すぎるという理由で取りあえず断念したそうだ。確かに今回のパネル参加者にCD-ROMで配布されたPDF資料を見ると700ページ以上あった。興味がある出版社はロボット学会にコンタクトをとってみるといいだろう。 佐藤氏は最後に「ロボットは『出口』が騒がれているが、長い目で取り組むことも大事だ」と述べた。
● アカデミックロードマップの意義 ~経済産業省から
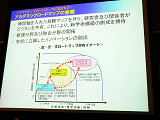
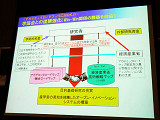
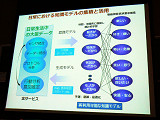
そして今回のアカデミックロードマップは、そのさらに先を描いたものとなる。この3つがそろってはじめて研究資源の配分を考える未来が描けるという。研究者が相互に異分野の進展を知ることで、新しい繋がりや研究分野が生まれる可能性もある。 ロボット分野のイノベーションのためには特にサイエンス分野の学際的取り組みが必要であり、アカデミックロードマップはその「コミュニケーションのためのツール」として機能するという。同様のことは技術系やビジネスにおいても言える。 また、なにより「融合を進めていく」ことが一番の目的であるという。福田氏は最後にロボットと似た分野としてナノテクノロジーを挙げ、これらの分野ではアカデミズムが牽引する時代が来るのではないかと述べた。 このあと、アカデミックロードマップを3分野に分けて、それぞれ解説が行なわれた。
● ロボット工学の将来
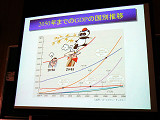
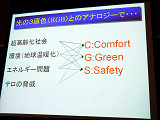
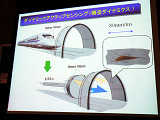
金子氏はまず、GDPの国別推移予想をあげた。日本経済の力をどの程度に見積もるかによって違いはあるが、日本が将来、GDPにおいて中国やインドに負けることは間違いない。国は自国の状況に応じてリソースを配分する。今の状態で予想を描くのではなく、GDPの推移などを想定した上でロードマップを描かないと無意味なものになってしまうというわけだ。 その上で金子氏は2050年の問題キーワードを4つ挙げた。まず1つ目は超高齢化である。日本が超高齢化社会を迎えることは確実だ。2050年以降は、人口の3割以上が高齢者になる。そして2番目は環境問題である。環境問題は今後さらに大きな割合を占めるようになる。3番目はエネルギー問題、4番目はテロの脅威だ。この4つに国の資産は重点投資されるようになると考えられる。 そして、それぞれの項目に対してロボット技術はどういう項目で貢献できるかという検討を行なったという。だが上記の4つのキーワードそのままでは、未来予想としては暗いイメージになってしまう。そこで4つのキーワードをRGBの色の3原色にならって、「comfort」「Green」「Safety」という3つの言葉で組みなおした。4つの問題は、この3つのバランスで描きなおすことができるという。 新たに設定した3つのキーワードでロボット技術を見ると、執筆者であるロボット研究者たちは、あまりGreen=環境を意識してないことが分かったという。 このあと金子氏は「ハイパーヒューマン」と題して自身の研究とアカデミックロードマップをつなげて解説した。人間には動体視力の限界がある。だが機械のビジョンは、現在のチャンピオンデータでは1秒間に1万枚の画像を処理することができる。人間の600倍の能力だ。高速ビジョンを高速アクチュエータと組み合わせれば、人間の能力は簡単に超えられるのではないか、と金子氏は考えているという。 技術カーブは右肩上がりだ。たとえば将来は、今よりも2桁くらいセンシング能力をあげると新幹線を使ったトンネルの微小傷センシングが可能になるのではないかという。新幹線がトンネルに入ったときに、周期的な振動でトンネルにひびがはいっていく。現在はその検査は新幹線を止めて行なっているわけだが、もし極めて性能の高い高速ビジョンができれば、逆に新幹線が入るときのような圧力変化を作ってやって、傷による振動をとらえるようなこと、即ちダイナミックアクティブセンシングができるのではないかという。
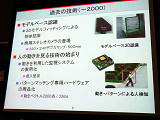
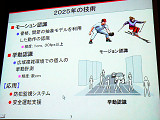
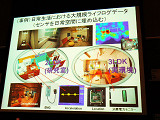
コンピュータビジョンが1つの転機を迎えたのは1990年代である。視覚処理専用ハードウェアが出てきたからだ。商用ステレオカメラを使ってモデルベース3D認識や動きパターンによる人検知など、動画像を使った処理が可能になってきた。現在は動きだけではなくパターンを見る技術が進歩し、ステレオでモノを見たり、顔検知が当たり前の技術になった。その技術を使って、何を注視しているかも分かるようになった。 では2050年の将来はどうなるのだろうか。ロボットの目とは本質的に何なのか。ロボットには人間に見えないものが見えるという長所がある。非常に高速に反応し、離れた場所のモノを見ることができるし、人よりも正確かつ劣化なく転送することができる。将来は、ある意味で人間を超えるハードウェアが揃ってくると考えられる。 では今後のトピックスは何かというと、広域・時系列の画像データ解析による「意味」のある事象の抽出が可能になることだという。また、行為や意図の認識ができるようになれば、人と意味を共有することも可能になる。「カメラ」から「目」となっていくわけだ。 2050年にはモーション、行動の認識ができるのではないかと考えられている。用途は防犯監視や見守りシステム、安全運転支援等だ。今のカメラは映していても人が何をしているのか理解できない。だが将来は動作シーケンスから人の行動を認識することもできるかもしれない。表情やジェスチャーの認識ができるようになれば、子供をあやしたり、介護・看護のような作業もロボットが行なえるのではないかという。 また他の問題もある。現状、もしもロボットに周囲を囲まれたら多くの人は不安に思うだろう。ロボットは人とは異なり、どのように行動するか人間には分かりにくいためだ。将来的には、例えば(画像処理の対象としては難しい)夜景を見て「きれいだ」と思ったり、画像が写していない部分もある程度類推して人の心の動きを推測する、感性的かつ人間と意味を共有するための技術が未来のロボット技術、ロボットビジョンを支えるのではないかという。
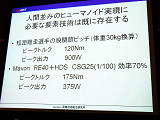
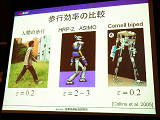
梶田氏は、ヒューマノイドは何よりも増してシステム技術が必要だという。また、システムの性能向上のためには要素技術の向上が必要だといわれている。だが、必ずしもそうとは限らない。要素技術開発に目を向けすぎると得てしてシステム全体ではなくその改良自体が目的化することがあり、また、システムは全体を見ないと開発できないからだ。システム開発においてはシステム全体の性能を総合的に評価する必要がある。模範的なシステム開発の例はホンダ「ASIMO」だという。 では、どんなヒューマノイドを目指したいのか。人間並みの身体能力を仮に歩行速度が時速5km程度、走行時速が30km程度、無補給で4時間以上稼動し、人混み内でも移動できて作業ができること、そして重量が30kg以下だとする。重量は経験上、この程度の重さでないと扱いにくいからだそうだ。 こうして見たときに、人間並みの能力を持つヒューマノイドの実現に必要な要素技術は既にあると梶田氏は語る。例えば短距離走選手の股関節ピッチを体重30kg相当に換算してトルクと出力を検討すると、それに近い能力を発揮するモーターと減速機は既にあるという。一方で欠けているものは何かというと、歩行のエネルギー効率である。今のロボットは仕事率で見ると、人間の10倍エネルギー効率が悪い。 よって、2050年をにらんだストラテジーは要素技術開発ではなく、既存要素技術を使ってシステム設計を洗練し、ハードウェアを効果的に用いる制御・知能化技術ではないかという。そして2025年のヒューマノイドはエネルギー効率を上げることで、単純に今日のリチウムイオンのバッテリを使ったとしても時速5kmで10時間は稼動でき、砂浜や草地のような不整地を踏破できたり、人ごみで日常的活動補助するといった人間並みの能力を実現できるという。 さらにその後、2025年から2050年にかけては超人的能力を持つヒューマノイド実現が目標になる。次世代の制御設計技術を使えば3日間連続稼動し、時速60kmで走行、100mを7秒台で走るロボットができるのではないかという。まとめると、ヒューマノイドはシステム化技術中心の研究開発により、2025年には人間並みの身体能力を持つ実現できるのではないか、2050年にはさらに超人的な能力を発揮できるようになるだろうとまとめた。
● 情報化・知能化社会の将来
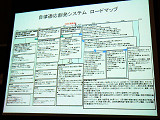
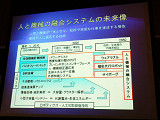
自律システム知とは何か。今の情報システムは自分が扱っている「情報」が何なのか分かっていない。だからとんちんかんなことをしてしまう。また自律目的設定能力がないと、局所的にも大域的にも自分が何をすればいいか分からないので、いちいち人間が指示しなければならなくなる。 社会システム知とは、ネットワークが発達し、色々な人の知恵が融合し、資源として自律性を獲得する。そうした社会インフラのインテリジェント化が、人類を巻き込んでいくという。 3番目の人間の拡大とは、人間を取り巻く環境だけではなく人間そのものが拡大していくというイメージだ。いわゆるエンハンスである。情報的なつながりも拡大していき、人間の存在自体が拡張・強化されていく。サイボーグやテレイグジスタンスや全人間的なシミュレーション技術とその応用などがここに入る。3つの重要課題は、情報、物理、人間の融合を意味している。 また大きなトピックスは量子計算の可能性だ。2030年頃には量子計算が実用化するかもしれない。そうなると超大規模な計算も一瞬ですむようになるかもしれない。ただ膨大な計算を活かすためには評価しなければならない。人間にとって価値があるかどうかという判断が必要だ。いかに計算能力が増してもそこの解決が必要だという。 そのためには記述して処理するという従来の人工知能的な考えから脱却し、言葉と身体・生理のネットワークをベースにした、言語と実世界の常時相互作用をベースとし、たとえば随時言葉の意味も変わっていくような知能情報処理システムが必要だという。 続けて國吉氏は「自律適応創発システム」について短くまとめた。従来技術は単一タスクで特定環境に限定されている。つまり特定用途にしか使えない。だがこれからの技術にはしぶとさやたくましさ、巧みさなどが必要とされる。これまでの工学では予想した範囲に特化するものづくりをやってきた。だがこれからは想定しない環境でも、何でもそこそここなせる、つまり生物が進化の過程でやってきたことができるようなシステムが必要になる。従来の知能技術を見直して生物にならったものへと発展させていくことができれば、その技術は色々な分野にまたがって応用されていく。
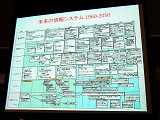
まず、量子コンピューティングが成功するかしないかで情報処理システムのアーキテクチャがまったく変わってくる、と強調した。量子コンピューティングがものになるかならないかによって未来が大きく変わるということだ。 セマンティックウェブは知的なウェブを目指した技術だ。ウェブそのものが単なる検索ではなく知的になるように、文書にメタデータ(タグ)をつけて機械に意味情報が理解できるようにする。このような技術によって、将来は人間の記憶だけではなくインテリジェンスそのものが拡張していくという。 未来のプログラミングについても変化が訪れる。委員の東大・竹内郁雄氏によれば「これからのプログラミングはプロトコル指向になる」という。現在のインターネットに繋がったデバイスがTCP/IPで制御されているように、将来は、ロボット内部の部品間の通信プロトコル、ロボット間の情報交換をどうするかということがロボット全体のシステム設計において重要な課題になっていく。OS指向ではなくプロトコル指向になる、という。 また、プログラムはタスクをあらかじめ想定して書くものだ。つまりプログラムを書くという行為は、あらかじめ想定された環境に対する対応を書くということに他ならない。だから環境が変化すればもう対応できない。プログラムには記号論理の限界がある。だから記号に物理量が付随したような「記号物理学」が必要である、と竹内氏は報告書のなかで述べているそうだ。いわゆる人工知能でいう記号接地は、記号論理をベースにしているからできないため、記号物理学を発展させることが必要になるという。 また電子情報科学が量子情報科学へと大きく変化する可能性もある。課題はスケーラビリティだ。長距離量子通信のための量子中継器や量子メモリの開発が必要になる。量子コンピューティングではまだ様々なレベルでスケーラビリティが必要だ。だが可能性は大きい。
応用用途は広く、意図推定、臨床試験の代替、病気の予測、テイラーメイド医療など。さらにここにロボットのハードウェアが加わると、シミュレーションが実物になって世に出ることになる。さらに進むと、まったく別のボディを持った別の自分によるパラレルライフのようなこともできるかもしれない。 だが運動系、代謝系、脳神経系、いずれにおいてもマクロレベルの知見とミクロレベルの知見が分離しているのが現状だ。マルチスケール化、時間スケールの拡大、マルチモーダル化が今後の方向性だという。関連技術として、計算機の演算能力向上、非侵襲生体計測技術、そしてロボットを作るための要素技術の発展も期待される。 おおよそ20年後に各機能別モデルの進化が進み、統合が始まるのではないかと山根氏は述べた。さらに50年後には本格的統合が始まり、ロボットハードウェアとの融合が始まると考えているという。実際に理研の次世代スーパーコンピュータ開発プロジェクト、EPFLによるThe Blue brain Projectなども始まりつつある。 将来は、医療の効率化は自分で判断して作業できるロボットなどができる可能性がある。一方、情報保護やその他の課題も考えられる。だがそこまで2050年まで技術が進むかどうかの方が課題だとも考えているという。
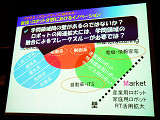
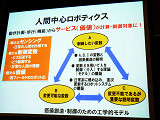
● 人間中心のロボット活用社会
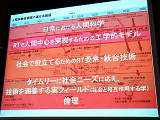
「人間中心」といったときに何がコア技術なのか。従来の計算対象は動作計画や歩行機能だった。これからはサービス、人にとっての価値が計算対象になるという。日常生活で起こるさまざまなイベントは身近な現象だが、実はよくわかっていないことが多い。今はさまざまな日常生活データが実フィールドで集まり始めている段階だが、それがさらに発展することで、日常生活現象がだんだん記述できるようになっていく。そしてデータが集まってくると人間の理解がより進み、工学的な観点から人間を中心にサービスをまとめあげていく技術ができあがっていくのではないか、そして社会全体が人間を中心としてロボット化することでより良くなっていくのではないかという。 これからのロボット開発には、タイムリーに社会ニーズに答え、技術を養う実フィールドを持つことが重要だという。市場に対しては「掃除ロボット」や「マッサージチェア」のような「RT日用品」の普及から始まり、そこから2020年代~30年には人のアシスト、人間行動データのマイニング、個人適合サービス統合へと進んでいくのではないかと予測を述べた。さらに長期的には子供の事故や死亡原因なども日常系を記述してモデル化していく「日常生活インフォマティクス」によって解明・予防が進んでいくという。
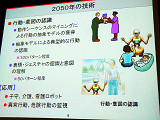
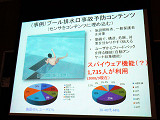
さらに義手を付けたことにより脳が変化する、すなわち機械と人の共存によって脳が変化することが分かりつつある。最初は脳全体が活動するが、徐々に賦活の局在化が見られるようになるという。このことは機械が変化することで人間が変化することを意味する。 知能ロボットに関しては、人間のエゴが生む誤った認識が広がる可能性もあると指摘した。たとえば機械に対しては、モノだからいいだろうということで機械を奴隷のように扱う者が出るかもしれない。またペットロボットなどは、ロボットの後ろに隠れる開発者の意図を、どの程度読み取らせるべきかという課題もある。また小型になればスパイ活動が可能なロボットにおける情報セキュリティの問題なども出てくるし、リスクを無視したより侵襲度の高い実験強行の可能性なども課題の1つだ。これらの問題を解決するためにも倫理基準の策定や法制化が重要になるという。 サイボーグ技術に関しては、これまでは機械の中だけでフィードバック系を考えていればよかったが、将来的には提示系を組み込んだフィードバック系の構築が必要なのではないかと述べた。
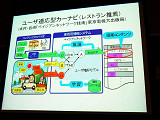
人は、まったく新規なものは受け入れにくい。そのためにコミュニティ支援のような社会的受容性のある情報サービスが必要だという。また実世界の大量データをどのように把握していくかということも実用サービスにおいては重要だ。現状、マシンラーニングの技術的発展により、大量データを集めて知識化し、活用することができるようになりつつある。今後どこまで、実データと統計モデルを使ったリコメンデーションサービスのようなものが可能なのか、どのような情報サービスが社会で必要とされるのかを検討しながら研究を進める必要があるという。 本村氏はベイジアンネットワークを使った「ユーザー適応カーナビ」がレストランを選択する様子などを交えて紹介した。
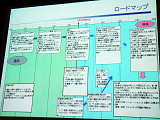
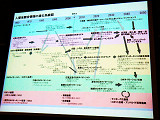
最後にアカデミックロードマップの全体概要を、ARM統括委員長の佐藤氏を代理して國吉康夫氏が述べた。「ロボット技術は人間中心、人間のためにある」という。アカデミックロードマップの図は地球環境との親和性や調和性や、そして人類のフロンティアの拡大をイメージしてデザインされている。 また、この予測は単なる夢物語ではなく専門家の意見に立脚していること、そして気象予報のような観測ベースの受動的予測ではなく、これからの技術や学問、そして社会全体をどのように進めていくべきか意思表示すべきと考えてかなり大胆に行なった、と強調した。
■URL 経済産業省 http://www.meti.go.jp/ 日本ロボット学会 http://www.rsj.or.jp/ 第26回日本ロボット学会学術講演会 http://www.org.kobe-u.ac.jp/rsj2008/ ■ 関連記事 ・ 「次世代スパコン」の脳神経系シミュレーションがロボットを変える ~第26回日本ロボット学会学術講演会 特別講演レポート(2008/09/12) ・ 未来のロボット技術を占うアカデミックロードマップ ~第25回日本ロボット学会学術講演会一般公開セッション(その2)(2007/09/27)
( 森山和道 )
- ページの先頭へ-
|