記事検索 |
バックナンバー |
【 2009/04/17 】 |
||
| ||
【 2009/04/15 】 |
||
| ||
【 2009/04/09 】 |
||
| ||
【 2009/04/06 】 |
||
| ||
【 2009/04/03 】 |
||
| ||
【 2009/03/27 】 |
||
| ||
【 2009/03/24 】 |
||
| ||
【 2009/03/18 】 |
||
| ||
【 2009/03/11 】 |
||
| ||
【 2009/03/06 】 |
||
| ||
【 2009/03/04 】 |
||
| ||
【 2009/02/27 】 |
||
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
タカラトミー「Omnibot 17μ i-SOBOT」分解・解析レポート |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Reported by
石井孝佳
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
10月24日に発売されたタカラトミーの「Omnibot 17μ i-SOBOT」。17もの自由度を持ちながら、従来では考えられなかった低価格を実現したロボットトイだが、その構造に興味を持っている方も多いだろう。今回は、約1日という短い時間だったが、i-SOBOTを実際に分解し、可能な限り解析を試みた。写真を中心に、その模様を見ていこう。
● 電源 まずは電源から見ていこう。
● サーボ
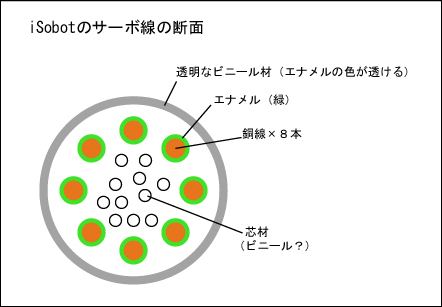
● サーボの線 サーボの線は、ツクモロボット王国で売られている高屈曲ワイヤーに似ているが、線数は少ないようだ。エナメル線なので、皮をむいただけではハンダがのらない。筆者が実験で行なった手順は、 1) 0.3mmのワイヤストリッパで皮をむく 2) ハンダゴテで芯材を熔かす 3) 番目の細かいサンドペーパ(600~1,000番ぐらい)でエナメルを軽く削る(下の写真) 4) ハンダを付ける。一カ所付いたらコテを左右に動かして熔けたエナメルを上手くズラす。 という感じで結線をした。結構細かい作業なので、これをやりたくない場合は、i-SOBOTを全部分解して、基板にハンダ付けされている部分を外した方がよいかもしれない。筆者も途中で切ってしまったことを少し後悔。
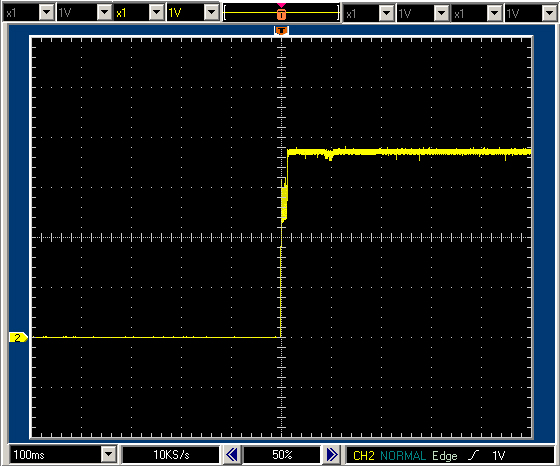
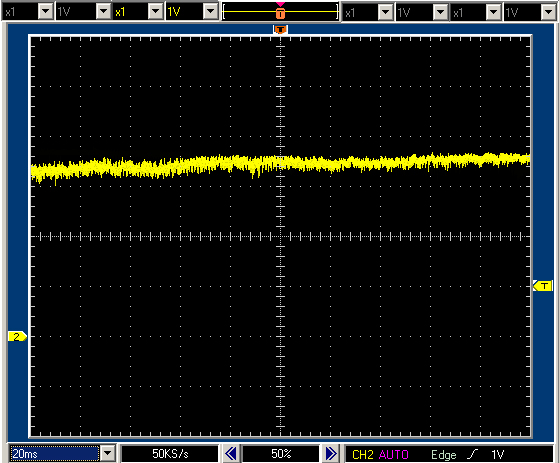
● サーボの信号波形をオシロで測定 サーボの線を次のように呼ぶことにする。R:赤線 G:緑線 B:青線 O:オレンジ線 ● R線の波形
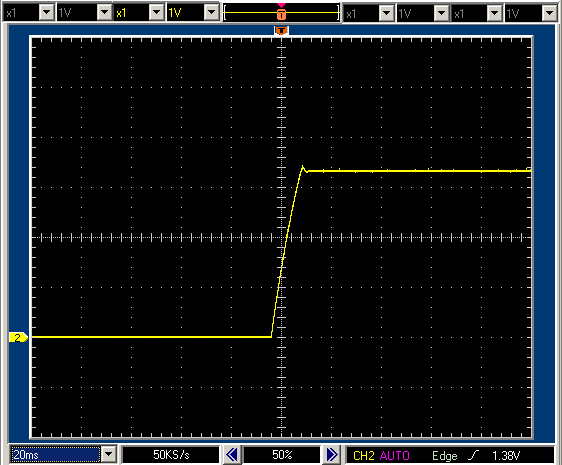
この実験の後、すぐにバッテリ切れになった。よってこのあたりの電圧が最低動作電圧と予測できる。サーボ非動作時で3.6V以上なのでまだまだいけそうな気配だが、サーボを駆動すると上の波形のように3Vを割る場合がある。サーボ動作中に瞬停して基板がリセットするような動作もしていた。ということで、エネループの性能の限界までは使い切ることはできないようだ。 ということで、Rはバッテリ直接、つまりモータへの電源ではないかと推測できる。 ● O線の波形
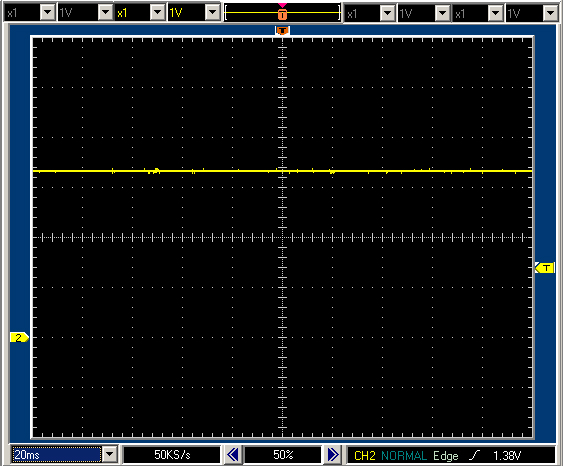
ということで、Oは電圧レギュレータICを経由した電源、つまりサーボ基板への電源ではないかと推測できる。 ● B線の波形 Bはずっと0Vのまま。よってBはGNDと推測できる。● G線の波形
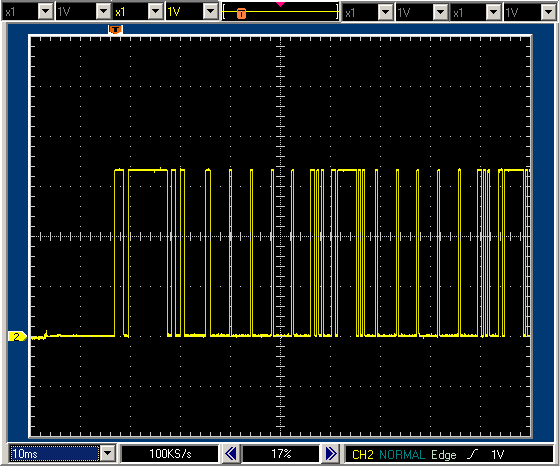
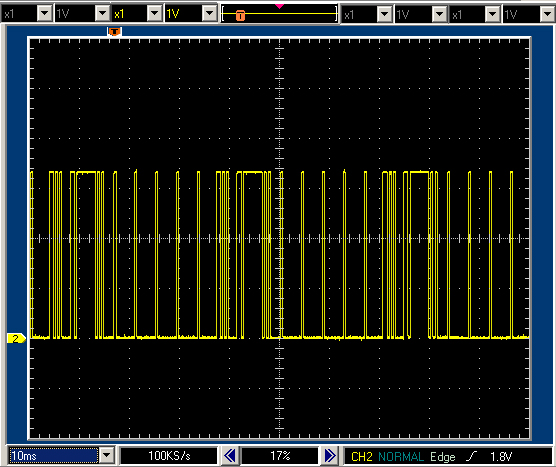
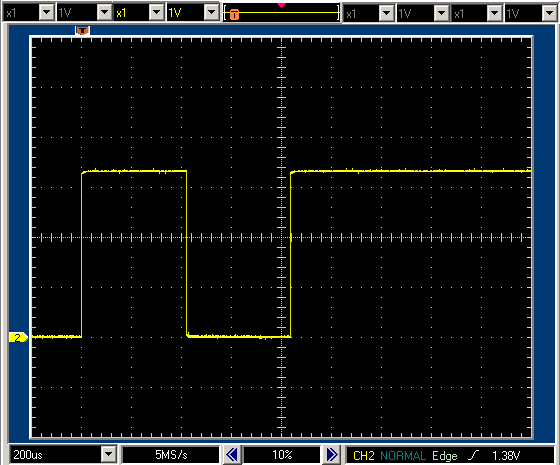
ということで、Gはサーボへの信号線ではないかと推測した。以後、G線を中心に解析してみる。 ● G線の解析 とりあえず、ここでは非同期シリアル通信であると仮定して検証していく。
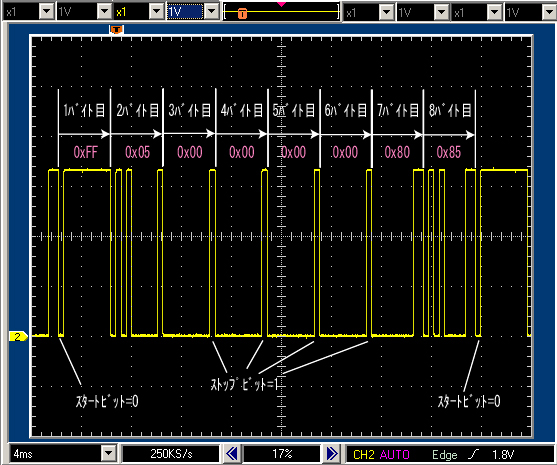
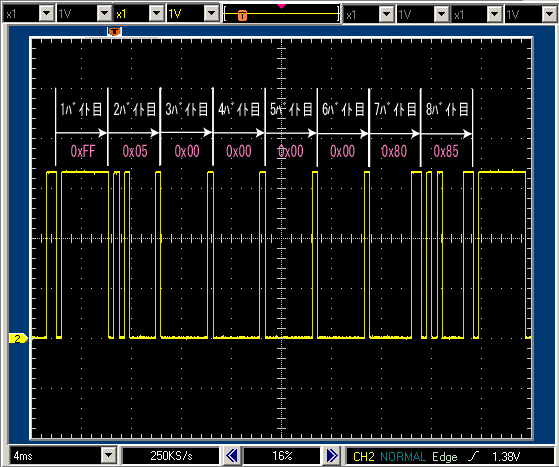
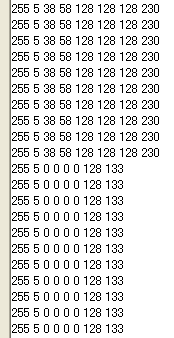
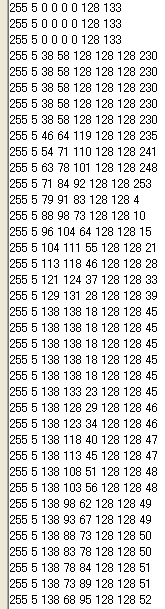
動いているときも、動いていないときもデータは常に流れつづける。ということで波形を見ていてもラチがあかないので、シリアル通信モニタを作ってみた。 下は起動時からのログ。通信設定は「2400bps、ストップビット1」の設定。「パリティ」は無いとし、「フロー制御」もフロー制御線自体が無いので“無し”の設定。10進数表示なので注意していただきたい。ここに表示した範囲で、電源投入時から起動時の説明モーションが終わるかおわらないかまでの時間となる。これをみると、やはり0xFF、10進数で255が周期性があるのでこれが先頭のシンクロバイトと思われる。
一番多いパターンが [255] [5] [?] [?] [?] [?] [?] [?] のパターンだ。先にオシロで見た待機時に [?] のところに0が多いのと、上の起動時に128が多いということで、[?]のどこかは位置データであると推測できる。128は1バイト値の中間値、つまり中心位置を指しており、0はおそらく停止(脱力)を表しているのではないかと思われる。1つのポートから3つ分(後でわかったがおそらく5個分)を出しているので、各サーボには何バイト目が自分のデータかという設定がされており、8バイト全て読み込んで自分の位置のデータで制御しているのかもしれない。[5]は位置制御コマンドと推測される。 次に、最後の値だが、例えば待機時は、 (1) [255] [5] [0] [0] [0] [0] [128(0x80)] [133(0x85)] 起動時の例で (2) [255] [5] [38] [53] [128] [128] [128] [225] (3) [255] [5] [39] [128] [128] [128] [128] [46] となった。簡単なところで、(1)が、先頭の[255]を除いて1~7バイト目までを足すと、 5+0+0+0+0+128=133 と、8バイト目と同じになる。(2)と(3)は (2) 5+38+53+128+128+128=480、オーバーフローで255を引くと残り=225 (3) 5+39+128+128+128+128=556、2回オーバーフローして255x2を引くと=46 つまり最後の1バイトはチェックサムであることが推測できる。上のモニタだと、ずっと見ていると気持ち悪くなってくるので表示を変えてみる。 [255]で改行したのが次の画面。
もう一発とって見た。
[255] [53] [16] [16] [?] [?] [?] [165] ... というパターンも見受けられる。2回起動したところをとったが、数値が微妙に違うので起動時に何かの値(ジャイロ?)を測定してバイアスをかけているのかもしれない。 次は、起動後、腕が脱力するところ。値に0が出始めるときから脱力(高周波音が消える)したので、やはり値0が脱力と思われる。
次に、脱力>P1動作時を見ていく。まず、脱力状態から先の起動後ポーズの値に変化する。その後、[5]の後の3バイトの数値が変わる。このモニタは左腕の信号だが、P1では左腕全部が動くので、おそらく[5]の後3バイトが腕のサーボ3つに割り当てられているのではないかと推測した。 動作時間だが、P1は「ヤッ」とやっている時間は約3秒ほどだ。2,400bpsで1バイト送るのに10ビット(スタートとストップビットを含むのでデータ8ビット+2ビット)、1命令8バイトなので、 1秒間に転送できる命令数=2,400/10/8=30個 となる。下のログの後、約80行ぐらいまでの間に大きく値が変化したのが3箇所あった。P1の動作は3ポーズの組み合わせなので大体合っている。この間、[255] [5] ……以外のコマンドは発行されていない。
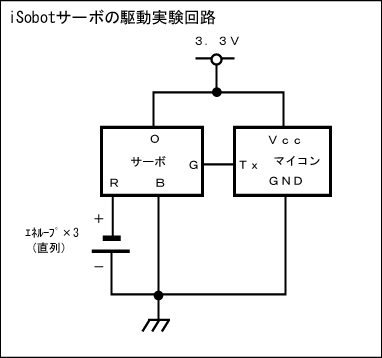
以上から、位置制御命令は、 [255] [5] [サーボ1の位置] [サーボ2の位置] [サーボ3の位置] [?] [?] [チェックサム] ではないかと思われる。P1動作時にサーボ1~3の値しか変化しなかったので、左腕はサーボ1~3であると思われる。 起動後の“きをつけ”状態の値が、 サーボ1:38 サーボ2:58 サーボ3:128 となった。128はおそらく中心位置と思われるが、この状態の時に明らかに中心位置だったのはヒジサーボだった。よってサーボ3がヒジだと思われる。 では、このフォーマットを実際に左ヒジサーボに送って、動くかどうか確認してみよう。 ● サーボの駆動実験 左ヒジサーボを取り出して、下のように結線した。マイコンも3.3Vで動くものを使用。3.3V電源は、エネループとは別に3.3V安定化電源を構成して接続した(GND共通)。
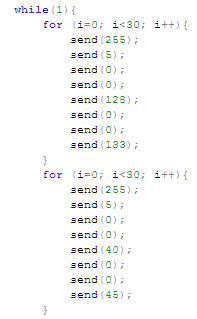
マイコンでは、とりあえず位置制御データであると思われるものを30回づつ送信してみた。ヒジサーボはサーボ3(5バイト目のパラメータ)であると推測しているので、まずはサーボ3の位置だけ動かすために、次のようなプログラムを作った。send( )関数は引数を1バイト送信する関数だ。
実験の結果、これだけで動作した。[5]の後の5バイトのうち先頭3つは位置データだと推測できていたが、その他もどうやら位置データのようだ。サーボ3の位置以外の数値を変えても動きに変わりはない。足は5軸なので、おそらく5バイト全てが位置データで、個々のサーボにあらかじめ自分のサーボ番号はどこかが決められているのではないかと思われる。上記の128と40の位置を変えると、この左ヒジサーボは動かなかったので「何バイト目か?」で自分のサーボへの命令かどうかを判定しているのは間違いないだろう。 動作スピードは、ギア比が高いのでRCサーボと比べるとかなり遅め。上の駆動方法が正しいかはわからないが、ここまでの内容だと速度を指示する命令が無い(と思われる)ので、上の方法が最速の駆動方法だろう。90度回転するのに体感で1秒弱かかる感じだ。スピードの面からすると、ROBO-ONEのような競技にはあまり向かないと感じられる。まあ、説明書にもバトルはしないようにと書いてあるので仕方のないところか。 一般的なマイコンは、UART(非同期シリアル通信機能)が多くても2chなので、自作マイコンボードで動かそうとした場合は、足サーボだけ集めて10軸のロボットは作れそうだ。ただし、それ以上の軸数にしようとすると、GPIO(General Purpose Input Output)を使ったシリアル通信のプログラムを自作しないとならないので、ちょっと難易度は上がりそうだ。 ● サーボの駆動のまとめ ・赤線:サーボのモータ用電源(エネループ3本直)・青線:GND ・橙線:サーボの基板用電源(3.3V) ・緑線:信号線(非同期シリアル2,400bps、ノンパリティ、ストップビット1、フロー制御なし) ・サーボ駆動以外にも、命令がある様子。(解析できず) ・8バイトパケットのサーボ駆動命令だけでサーボは動かせる。 ・サーボ駆動命令のフォーマットは次の通り(だと思われる) [255] [5] [サーボ1] [サーボ2] [サーボ3] [サーボ4] [サーボ5] [チェックサム] ※チェックサムは、8ビットの符号なし変数を用意し、桁あふれを気にせずに[5]~[サーボ5]の値を単純に合計すれば求められる。 ※サーボ位置を0にすると、現在位置で脱力する。 ● メインボード 次は本体を分解して、メインボードまわりを見てみよう。
ブラックボックスが多いので、これ以上のことは分からない。 ● サーボをさらに分解してみる 最後にサーボをとことん分解してみた。
ということで、ギア比は、 1段目 7:34 2段目 6:31 3段目 6:20 4段目 8:24 5段目 8:24 となり、単純に計算すると約1:826、効率70%としても1:578の減速比になる。
● 最後に 今回はとりあえずサーボを中心に解析してみた。読者の中にはすでにi-SOBOTを入手して、多少なりとも分解してみた方がいるかもしれない。今回レポートした内容以外にも解析ネタ満載の素材だと思うが、「トルクはいくつなのか?」「赤外線リモコンの送信パターンは?」「クラッチはどれなのか?」「音声認識はどうやってるの?」などなど、興味はつきないところだ。興味はつきないが、力が尽きてしまったようで、今回はこのあたりで一段落とさせていただきたい。■URL タカラトミー http://www.takaratomy.co.jp/ i-SOBOT公式サイト http://www.isobotrobot.com/ ■ 関連記事 ・ タカラトミー「Omnibot 17μ i-SOBOT」緊急レポート ~31,290円のヒューマノイドロボット、ついに発売(2007/10/27) 2007/11/08 00:28 - ページの先頭へ-
|