|
|
|
Beauto Balancerのパッケージ。非常にコンパクトだ
|
ヴイストンの「Beauto Balancer」は、倒立振子を題材にして、制御の仕組みや理論を学習できる倒立振子制御学習キットだ。倒立振子とは、振子を逆さまにしたもの。普通の振子は支点が上にあって、下の錘の部分がゆらゆら揺れるが、倒立振子は支点が下にあって、上の部分が揺れる構造になっている。もちろん、支点の上に重心がくる不安定な構造なので、倒れないように制御してやらないと、すぐに倒れてしまう。手の平の上に棒をたてて、その棒が倒れないように制御するイメージだ。倒立振子は、産業用としても、さまざまなところで活用されているが、中でも有名なのがセグウェイだ。セグウェイは、倒立振子を利用した乗り物であり、的確な制御により高い安定性を誇る。
これまでにも、他社から教育用の倒立振子キットが発売されていたが、価格が数万円以上しており、気軽に購入するにはやや高価であった。Beauto Balancerは、Beautoシリーズで培ったノウハウやパーツの共用化により、開発環境込み(開発環境は別途ダウンロードする)で9,975円という、大幅なコストダウンを実現したことが魅力だ。
● 組み立ては非常に簡単
Beauto Balancerは、1軸2輪タイプの倒立振子のキットであり、二足歩行ロボットキットなどに比べると、パーツ数が少なく、組み立ては簡単だ。心臓部のコントロールボード(CPUボード)としては、同社製のVS-WRC003を採用。VS-WRC003は「Beauto Chaser」にも採用されているコントロールボードで、CPUにルネサステクノロジ社製のH8/36064Gを搭載している。ボード単体で、DCモータ×2chとアナログ入力×4chをサポートしているほか、USB接続に対応。単体でのC言語によるプログラミングも可能であり、C言語による制御学習にも最適なボードだ。なお、VS-WRC003のC言語による制御についてはBeauto Chaserの連載で詳しく紹介される予定なので、そちらを参考にしてほしい。

|

|
|
Beauto Balancerのパーツ一式。モーターも1個しかなく、パーツの数はかなり少ない
|
コントロールボード(CPUボード)として「VS-WRC003」を採用。CPUにルネサステクノロジ社製のH8/36064Gを搭載する
|
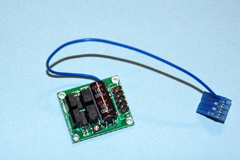
VS-WRC003には各種センサーを接続可能だが、Beauto Balancerでは、ジャイロセンサーとロータリーエンコーダを搭載したセンサー基板「VS-SB001」を接続する。ジャイロセンサーは角速度を検出するセンサーであり、本体がどちらの方向に倒れようとしているかを検出することができる。ロータリーエンコーダは、モーターの角速度(回転速度)を検出することができ、この2つのセンサーからの信号によって、本体が倒れないように制御するわけだ。
|

|
|
センサー基板のVS-SB001。ジャイロセンサーとロータリーエンコーダ(回転数センサー)を搭載する
|
モーターとしてマブチモーター「RE-260」を採用
|
一般的な二足歩行ロボットキットの場合、組み立て説明書がPDF形式でCD-ROMなどに収録されていることが多く、組み立ての前に説明書を印刷する必要があるが、Beauto Balancerでは印刷済みの組み立て説明書が付属しているので、すぐに組み立てられるのはうれしい。組み立て説明書には、図や写真が多用されており、わかりやすい。パーツ数も少ないので、初めてロボットキットを組み立てるという人でも、1時間程度で組み立てられるだろう。
なお、組み立ては簡単だが、ネジを間違えないように注意すること。また、最後にタイヤをシャフトに取り付ける際に、ナットを強く締めすぎてしまうと、タイヤがスムーズに回らなくなり、うまく動作しなくなる。筆者も、これでちょっとはまってしまい、結局、左側(モーターから遠い側)のタイヤの内側のナットはあまり締め込まずに瞬間接着剤でシャフトに固定し、そのナットにタイヤも接着剤で固定することにした。組み立てたが、うまく立たずに倒れてしまうという人は、タイヤがどちらの方向にもスムーズに回るかどうかをチェックするといいだろう。

|

|
|
モノクロだが、印刷された組み立て説明書が付属するのは親切だ
|
Beauto Balancerの組み立てには、全部で5種類のネジを利用する。長さ6mmのネジCと長さ5mmのネジDを間違えないように注意
|
|

|
|
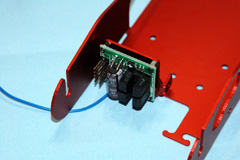
まず、メインフレームにM2スペーサーをネジで取り付け、センサー基板をネジで固定する。基板のピンヘッダが外側になるように取り付けること
|
次に、電池ボックスを取り付ける。電池ボックス側からネジCを入れて、裏側からM2スペーサーで固定する
|

|

|
|
モーターをモーターホルダに取り付ける。まず、配線側をモーターホルダに当ててから、出力軸側を強く下に押し込んでホルダに圧入する
|
モーターをモーターホルダに固定したら、ブッシュを取り付けて、モーターホルダをメインフレームにはめて、ネジEで固定する
|

|

|
|
モーターの出力軸に5mm程度に切ったチューブを差し込む。チューブは出力軸の奥まで差し込まず、数mm隙間をあけること
|
輪ゴムをモーターホルダの穴に結び、メインフレームの爪にひっかけて固定する
|

|

|
|
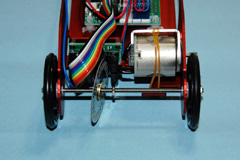
メインフレームにVS-WRC003を樹脂スペーサーを利用して固定し、フラットケーブルをセンサー基板に取り付ける。ケーブルのコネクタの向きを間違えないように注意しよう
|
フラットケーブルの反対側のコネクタをVS-WRC003の右上のピンヘッダに差し込む。左側にコネクタの△印がくるように差し込めばよい。また、センサー基板や電池ボックス、モーターのケーブルも接続する
|

|

|
|
タイヤを組み立てる。まず、タイヤAとタイヤBの2つのパーツを組み合わせる
|
タイヤAとタイヤBをネジで固定したら、Oリングをはめ込む。同様にして2つ作る
|
|

|
|
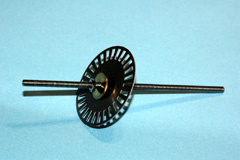
シャフトにエンコーダホイルを取り付ける。ここではまだしっかり固定する必要はない
|
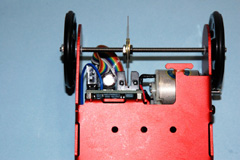
シャフトをメインフレームに取り付ける。エンコーダホイルがセンサー基板上の黒いパーツの間に入るようにして、シャフトの両端からブッシュを差し込み、ナットで止める
|
|
|
|
タイヤをシャフトの左右からはめて、ナットで固定する。ナットはあまり強く締めすぎないようにすること
|
エンコーダホイルをセンサー基板上の黒いパーツの隙間の中央にくるようにして固定する。エンコーダホイルを固定したら、手でシャフトを回してタイヤがスムーズに回ることを確認する
|

|

|
|
完成したBeauto Balancer。ゆっくり組み立てても1時間もあれば完成する。電源は単3アルカリ乾電池4本で動作する
|
Beauto Balancerを動かすときには、転倒時の衝撃を緩和するために、電池ボックスに付属の保護バンドを装着する
|
● 上に物を乗せても倒れずに直立する
組み立てが完了したら、早速動かしてみよう。新品の単3アルカリ乾電池4本を用意し、電池ボックスに入れ、保護バンドを装着する。電源スイッチを入れて、ブザーが鳴り続けていないことを確認し、ボタンを押したまま本体を垂直に立てて、タイヤを床に接地させた状態でそっとボタンを離す。ボタンを離すと同時に、本体から素早く手を離さないと転倒してしまうことがあるが、成功すれば、その場で安定して立つようになる。文章にすると面倒なようだが、コツをつかめば簡単だ。いったん安定したら、上に物を乗せたり(もちろんあまり重い物はダメだが)、物を投げ込んだりしても、倒れずにちゃんと立っているのはなかなかすごい。倒立振子ロボットを見たことがないという人に見せたら、結構驚いてくれるだろう。「セグウェイと同じ仕組みなんだよ」と説明すれば、飲み会などでのネタにもなりそうだ。ただし、床面との相性やセンサーの誤差などによって、いきなり走り出したり、倒れてしまうこともあるので、テーブルの上などで動かすのは危険だ。床の上で試すようにしてほしい。

|

|
|
【動画】電源スイッチを入れて、ブザーが鳴り続けていないことを確認し、ボタンを押したまま本体を垂直に立て、タイヤを接地させた状態でそっとボタンを離す
|
【動画】成功すれば、このようにその場で安定する
|

|

|
|
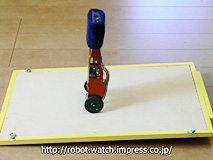
【動画】安定した状態になれば、上に少しくらい物を載せても倒れない
|
【動画】Beauto Balancerの上にプラスチックコップを載せて、ブロックを投げ込んでみたが倒れない
|
● 「Beauto Balancerプログラマ」を利用して、ゲインやモードの変更が可能
Beauto Balancerのコントロールボードには、あらかじめ最適なゲインが書き込まれており、その場で直立するようになっているが、専用ソフト「Beauto Balancerプログラマ」を利用することで、ゲインやモードの変更が可能になる。Beauto Balancerのパッケージには、CD-ROMなどは含まれていないので、Beauto Balancerプログラマを利用するには、ヴイストンのWebサイトからダウンロードする必要がある。また、USBシリアルドライバもダウンロードしなくてはならないのだが、USBシリアルドライバは、Beauto Chaser専用ソフト「BeautoビルダーNEO」のところでダウンロードできるようになっているので、忘れないように(ファイル名はCP210x_VCP_Win2K_XP_S2K3.exe)。
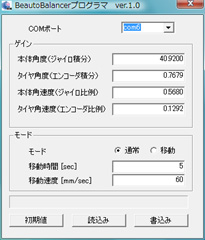
VS-WRC003とPCを付属のUSBケーブルで接続し、電源スイッチを入れて、Beauto Balancerプログラマを起動し、COMポートを指定する。マニュアルは、Windows XPでの説明になっているが、筆者が試した限りでは、Windows Vistaでも問題なく動作した。Beauto Balancerプログラマでできることは非常にシンプルで、各センサーのゲインの変更と、モードの変更である。ゲインをむやみに変更すると、うまく立たずに倒れてしまうようになるが、いろいろ試してみると勉強になるだろう(「初期値」ボタンをクリックすれば、初期値に戻すことが可能)。モードは、デフォルトの「通常」と「移動」の2種類あり、通常では、基本的にその場で静止するが、移動にすると、前後に往復運動を行なう。その下の移動時間が、進行方向を反転するまでの時間で(5秒なら、5秒おきに進行方向が変わる)、移動速度では、前後移動の速度を指定できる。ゲインやモードを変更したら、「書き込み」ボタンをクリックし、変更内容をVS-WRC003に転送すれば完了だ。
|

|
|
Beauto Balancerプログラマの画面。できることは非常にシンプルで、プログラムの知識は不要だ
|
ゲインやモードを変更したら、「書き込み」ボタンをクリックする
|
● 坂道での往復運動も可能
モードを「移動」に変更して試してみたが、設定した間隔(この場合は5秒)で移動方向を反転させて、前後に往復運動を行なっている。今度は、坂道を作ってその上で往復運動をさせてみたが、ちゃんと倒れずに前後に往復運動を行なっている。1万円を切るキットでも、ここまでの制御ができるのかとちょっと感動した。
Beauto Balancerは、手ごろな価格の倒立振子制御学習キットであり、高専や大学などでの制御基礎学習用としても適した製品だが(ここでは紹介していないが、最初に述べたように、C言語での制御も可能なので)、難しいことを考えずに、単に動いている様子を見ているだけでも面白い。外装をつけて楽しむのもいいだろう。また、コントロールボードの拡張性も高いので、やろうと思えば、PSDセンサーなどをつけて、障害物の手前で停止したり、逆に物を追いかけるといった自律動作を行なわせることも可能だ(左右への旋回はできないので、前後だけの移動にはなるが)。そういった意味で間口の広いキットであり、セグウェイの技術に興味があるという人にもお勧めだ。

|
|
|
【動画】Beauto Balancerプログラマを利用して、モードを「移動」に変更。5秒おきに移動方向を反転させている
|
【動画】坂の上でも、このようにちゃんと前後往復運動をするのはなかなか感動ものだ
|
■URL
ヴイストン
http://vstone.co.jp/top/j_top.html
Beauto Balancer
http://www.vstone.co.jp/top/products/robot/beauto/bindex.html
2009/04/03 12:59
- ページの先頭へ-
|