記事検索 |
バックナンバー |
【 2009/04/17 】 |
||
| ||
【 2009/04/15 】 |
||
| ||
【 2009/04/09 】 |
||
| ||
【 2009/04/06 】 |
||
| ||
【 2009/04/03 】 |
||
| ||
【 2009/03/27 】 |
||
| ||
【 2009/03/24 】 |
||
| ||
【 2009/03/18 】 |
||
| ||
【 2009/03/11 】 |
||
| ||
【 2009/03/06 】 |
||
| ||
【 2009/03/04 】 |
||
| ||
【 2009/02/27 】 |
||
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
芝浦工大「大人のためのロボットセミナー」レポート |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
~ワンチップマイコンで8足ロボットを自作する
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Reported by
井上猛雄
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
● 芝浦工大のロボット教育の取り組み
会場となった芝浦工業大学生涯学習センターでは、社会的貢献事業の一環として、「ロボット教材を用いた創造性教育の総合的取り組み」を実施している。国内各地の教育委員会と協力し、小中学生向けのロボットセミナーや、高校生向けのライントレースロボット講座、さらに今回レポートする大人のロボットセミナーなど、レベルに応じた創造性カリキュラムを開発している。この創造性教育の取り組みが評価され、同校では2003年度のグッドデザイン賞(新領域デザイン部門)を受賞している。 大人のロボットセミナーは、ワンチップマイクロコンピュータを利用した多種目競技用の8脚歩行教材ロボット「SPIDER」を1から組み立てながら、コンピュータの基本原理や、ロボットの機構部の仕組み、C言語によるプログラミング、制御工学などさまざまな要素技術を学習できるように工夫されている。 とはいえ、「大人~」と銘打つだけあって、その内容はとても濃く、充実したものとなっている。実際このセミナーの内容は、芝浦工業大学の授業に取り入れられており、工学部の学生の教育に大きな効果をあげているという。 なお、「SPIDER」は、下諏訪町工業振興協議会が機構部の開発を行ない、有限会社サカヅメエンジニァリングが設計・製造を担当、芝浦工業大学の事業法人エスアイテックにてキットが販売されている。 第1回目のレポートでは、セミナー初日に行なわれたワンチップマイコンボードの製作について、実際の製作過程を見ながら、その仕組みを解説していこう。
● 頭脳となるPIC、心臓となる発振器、足回りのモータドライブIC ワンチップマイコンボード製作の前に、まずキットに同梱されている重要な電子部品について紹介する。必要となる電子部品は【表1】のとおり。これらのうち、特にポイントとなる電子デバイスは、発振素子とマイクロコンピュータ、DCモータ駆動ICだ。
【表1】ワンチップマイコンボードの製作で必要となる電子部品の一覧。今回はモータ駆動用のドライバーICは2個だけ利用する 「セラロック」は、マイクロコンピュータを動作させるための発振素子で、一定の周波数の信号を出力して、基本クロック信号をPIC側に供給する。いわばマイコンが頭脳とすれば、セラロックは心臓のような役割りを果たすものだ。今回はPICの仕様に合わせて、20MHzのクロックを発振する素子を採用している。このクロックに同期する形でPICが動作する。一般に発振用の素子はセラミック振動子と水晶振動子に大別できる。水晶振動子のほうが精度は良いが、電圧制御発振回路で周波数を可変をする場合には、セラミック振動子の方が広い範囲で可変できるメリットがある。
「TA7257P」は、東芝で発売しているDCモータ駆動用の専用ICだ。これは、いわば足回りとなるエンジンの駆動・制御部分にあたるもの。通常、DCモータを駆動・制御するためには4つのトランジスタをブリッジ状に組んで、モータに流れる電流の方向を切り替えて正転・逆転を制御する。このドライブICはトランジスタによるブリッジ回路と、それを制御するための回路、さらに過電流保護回路、熱遮断回路を内蔵している【図1】。
ドライブICの制御部は2bitになっており、【表2】のように正転・逆転・ストップ、ブレーキのモードを切り替えることが可能だ。PICの出力ポートBからドライブICの制御部へビットパターンを送ることで、ロボットの走行を制御できるようにしている【表3】。セミナーで利用する「PIC Moter Driver Board 2003」の基板では、最大で3つのモータドライブICを搭載できる仕様だが、今回のロボットは左右2つのモータを使用するため、基板上にある残りのICの配線はそのままにしておく(ドライブICも2つだけ搭載)。
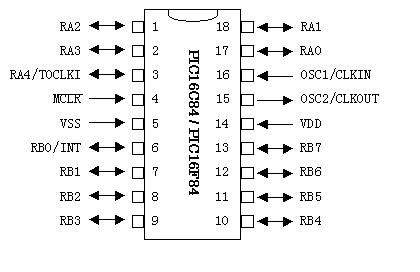
【表3】モータ制御用のビットパターン 最も重要なロボットの頭脳にあたるマイクロコンピュータについては、マイクロチップテクノロジーの「PIC16F84A」を採用している。PICとは「Peripheral Interface Controller」の略称で、コンピュータの周辺機器との接続部分を制御する目的で開発されたRISC(Reduced Instruction Set Computer)型のワンチップマイコンである。RISC型のため、命令数も35命令と少なく、高速で動作できるという特徴がある。PICは組み込み制御用のワンチップマイコンとして大変ポピュラーな製品であり、価格も安く、秋葉原などで500円ぐらいから購入することができる。 PICは、ワンチップマイコンとしてメモリのほかに、アナログ信号をデジタル信号に変換するA/Dコンバータ、シリアルポート、DCモータの速度制御に用いられるPWM(Pulse Width Modulation)回路などを内蔵したさまざまな製品がラインアップとして用意されている。命令ビット長で分類すると、12/14/16ビットの3系列に大別することができる。 このうち、PIC16F84Aは14ビットタイプに属し、製品シリーズの中ではミッドレンジのタイプに属する。前述のとおり、CPUはクロックに同期して動作する。PIC16F84Aの場合はクロック周波数が20MHzで、4クロックで1つの動作が完結する仕組み(CPUサイクルと呼ぶ)。従って、1クロックが50nsとなるので、理論上は1命令あたり200nsで処理できる計算だ。本来、PICシリーズでは命令の呼び出しに4クロック、命令のデコード(解読)に4クロックを要するので、2CPUサイクルで動作が完了することになるが、命令の取り込みと実行を並行して処理できるため、見かけ上では1CPUサイクルで動作が完了する。 内蔵メモリは、プログラムコードを記録する1Kワードのプログラムメモリ(EEPROM)、内部レジスタとして利用される68バイトのファイルレジスタ(RAM)、データを保持する64バイトのデータメモリ(EEPROM)で構成される。専用のPICライターを利用して、プログラムの書き込みが可能だ。 入出力ポートのピン配置は【図2】、【表3】のようになる。AポートがRA0-RA04まで、BポートがRB0-RB07までで、合計13個のポートがある。これらのポートは、レジスタの設定値を変えれば、ポートごとに入出力のモードを変更することが可能だ。ここではBポートのRB05/RB04を左モータの制御用出力に、さらにRB03/RB02を右モータの制御用出力に割り当てている。 また、各ポートの許容シンク電流(引込み電流)は25mA、許容ソース電流(供給電流)は20mAとなっており、ポートからダイレクトにLEDを点滅させたり(今回はRA0にLEDを接続)、トランジスタのベース部と接続して、モータのスイッチング制御も行なえる。 このほかPICの特徴として、タイマ/カウンタ機能によって、一定の設定値からクロックをカウントして割り込みを発生させたり、ウォッチドッグタイマ(WDT)でリセットをかけたり、プリスケーラでクロックを分周することが可能だ。
● いざ、ハンダ付け開始。プリント基板のため作業は簡単! では早速、ロボットの制御の中枢となるワンチップマイコンボードの製作にとりかかろう。
今回のセミナーで利用しているのは、芝浦工業大学電気工学科が設計、エフテック株式会社が製作したPICマイコンの学習ボード「PIC Moter Driver Board 2003」である。PICの基本回路に加え、DCモータを再逆転できるドライブICを3つ搭載できるようなっている【図3】。ただし、今回のロボットでは前述のとおり2つのDCモータのみ使用する。
あらかじめガラスエポキシ両面基板に回路パターンがプリントされているため、キットで用意されたICや、抵抗、ダイオード、コンデンサなどの電子部品を手順に沿ってハンダ付けしていけば、誰でも簡単にマイコンボードが完成できるように工夫されている。さらに、電子部品を取り付けるピッチも、通常部品の2.54mm間隔以外は、すべて2倍間隔にしてある。初心者でもスムーズにハンダ付け作業が行なえるように配慮されている点がうれしい。 また、安定した動作電圧を供給できるように、3端子レギュレータを搭載できるようにあらかじめパターンがつくられている。これは、専用ボードの電源を単三電池から供給するようにしているためだ(ただし、今回の製作ではレギュレータICは利用していない。パターンの一部をショートさせて、そのまま利用するが、これでもボードは安定して動く)。このほか、スタート/リセットスイッチ、電源動作/回路動作用の発光LEDなども取り付ける。後述するPICライター接続用の転送回路とコネクタなども用意されている。 基本的にパターン基板に指定された電子部品を挿入して、ハンダ付けしていけばよいので作業自体は簡単に行なえる。実際に、この作業は2時間弱で終了した。できるだけ背の低い電子部品を先に取り付けていくと、あとあとの作業がラクになる。たとえば、ICソケット、抵抗、ダイオード、IC、コンデンサといった順番。 ハンダ付けをする際には、いわゆる「てんぷらハンダ」や「いもハンダ」にならないように気をつける。これらはハンダの加熱の調整がうまくいっていない場合に起こる。今回は取り付ける電子部品のピッチが広いので問題はないが、ハンダが隣の部分とつながってしまう「ブリッジ」にも注意したい。 また、ダイオード、発光ダイオード、電解コンデンサ、DCモータドライブ用ICなどのように極性をもつ電子部品は、取り付け方向に十分注意する必要がある。PIC用のICソケットの方向にも気をつける。ICソケットのように1度にハンダ付けをするピン数が多い場合には、あらかじめソケットをセロテープでとめてから作業すると、ソケットが浮いたりせずに、うまく取り付けられる。
今回のセミナーでは、ハンダ付け作業中に回収されたPICに動作チェック用プログラムが焼き付けられている。ボードのICソケットにPICを挿入し、スタートボタンを押して、LEDが点滅すれば、動作チェックはOKだ。さらにPICライターを使って、DCモータ駆動プログラムをPICのEEPROMに書き込み、動作チェックを行なった。 今回はセミナー初日に行なわれた「ロボットの頭脳」であるワンチップマイコンボードの製作について紹介した。次回は、統合開発環境「MPLAB IDE」と、PICライターによるプログラムの書き込み方法、動作チェックに使われたプログラムについて紹介する。 ■URL 芝浦工業大学 http://www.shibaura-it.ac.jp/ マイクロチップ・テクノロジー・ジャパン http://www.microchip.co.jp/ PIC (R) microcontroller,MPLAB (R) Integrated development environmentは、Microchip Technology Incの登録商標です。 Certain materials contained herein are reprinted with the permission of Microchip Technology Incorporated.No further reprints or reproductions may be made of said materials without Microchip Technology Inc.'s prior written consent. 2006/07/25 00:01 - ページの先頭へ-
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||