記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
「ロボットの実用化に欠かせない触覚センサー技術」 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2月5日(木)~20日(金)に大阪産業創造館において、ロボット・フェスタ2009が開催され、ロボットを展示するロボットショールームやロボットテクノロジー展が実施された。 本稿では、東京大学IRT研究機構 特任助教の中井明亮仁氏による講演「ロボットの実用化に欠かせない触覚センサー技術」についてレポートする。東京大学とパナソニック株式会社が開発した「超小型MEMS 3軸触覚センサーチップ」は、「今年のロボット」大賞2008の部品・ソフトウェア部門で優秀賞を受賞した。サイズが米粒の半分程度という微小なセンサーチップ誕生により、ロボットのセンシング技術が一段と実用化に近づいたという。
● IRT研究機構の取り組み 講演は、中井明亮仁氏が所属する「IRT研究機構」の説明から始まった。IRT研究機構は、2006年度に文部科学省が公募した科学技術振興調整費の予算枠で採択された「少子高齢社会と人を支えるIRT基盤の創出」をプロジェクトテーマに掲げ研究開発を進めている。10~20年後の大きなイノベーションを目指し、国立大学法人東京大学と、トヨタ自動車株式会社、オリンパス株式会社、株式会社セガ、凸版印刷株式会社、株式会社富士通研究所、パナソニック株式会社、三菱重工業株式会社の7社が参加している。“IRT”とは、情報通信技術(IT)とロボット技術(RT)を合わせた造語で、ITとRTに社会科学(Social Sciences)を融合させてイノベーションを創出を目指している。中井氏は、「今後、ロボットを家庭内で活用するためには、現在のRTには解決しなくてはならない問題がいくつもある」と指摘する。 家庭内で活用するには、もっと小型・軽量・柔軟が求められるし、ロボットが全自動で動くのではなく、人と一緒にテーブルを運ぶ協調動作、道具・装置の操作とプログラムの共有、日常経験データの共有と活用、人へのインターフェイスといった点、そして本講演のテーマである五感に対するセンサー技術など要求されることは多い。 IRT研究機構では、単にITとRTだけではなく、「若者から高齢者まで広く受け入れられるロボットとはどのようなものか?」 とか、「人に優しいインターフェイスデザイン」といった観点も踏まえて、サービスロボットの実現を研究しているという。
プロジェクトの課題となっている少子高齢社会についてだが、日本の人口は今後減少を続け、2055年には9,000万人を割ると想定されている。人口減少に伴って労働力も激減するため、IRTで解決する方法を探っているわけだ。 この時に大切なことは、「ロボットに何ができるのか?」を考える前に、「ロボットにして欲しいこと/して欲しくないこと」を考える必要がある点だ。これについて、中井氏はUFJ総研が実施したアンケートを示した。それによると、食事の後片付けや掃除、洗濯といった単調になりがちな家事についてはロボットに作業を期待しているが、育児や料理などは、自分でやりたいという結果が出ている。 こうした意向を汲み、昨年10月からRTの活用事例として「床の上や椅子においてある洗濯物を洗濯機に入れる」、「食器洗いを助ける」、「人が使ったものやしまった場所を覚えている」といったプロジェクト成果を発表してきた。
● 3軸触覚センサーの必要性 中井氏は「超小型MEMS 3軸触覚センサーチップ」の搭載例として、パナソニックと共同開発したキッチンの上に置かれた食器を食洗機に入れるというデモンストレーション動画を紹介した。このロボットハンドの親指に、「今年のロボット」大賞2008優秀賞を受賞した「超小型MEMS 3軸触覚センサーチップ」が搭載されている。
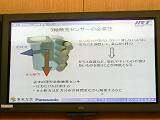
「実は、これまで3軸である必要性はさほど重要視されてこなかった」と中井氏はいう。というのは面で圧力を検知できれば、その時間変化からせん断力を擬似的に計測できるため、圧力が分かればいいという考え方をしていたためだ。しかし、リアルタイム制御のためコンピュータでせん断力を計算するパワーを減らしたいとか、正確な測定値が欲しいという事情から3軸触覚センサーが必要とされるようになったそうだ。 例えばコップを手に持った時、ぐっと握る力はセンサーにとっては圧力として検出される。この時の重みは、腕が感じるだけではなく、コップに触れた指先が重量でずり下がってくることからも感じている。このような力をせん断力として、ロボットハンドも検出できるとさまざまな面で役立つ。 コップを持ち続けている間は、せん断力は変化しない。つまり“コップが滑らない”ということだ。把持力を微妙に調整しながら持つことができれば、ガラス食器や紙コップなどの壊れやすいものを握りつぶさない程度に力を加減しながら持てるようになる。このように繊細な制御のためには、3軸触覚センサーが必要となる。 ● 「超小型MEMS 3軸触覚センサーチップ」とは 実は、3軸触覚センサーやせん断力センサーは、3年くらい前から東大の下山研究室で研究しており、非常に感度がよく使い勝手のいいセンサーであることは分かっていたそうだ。「当時、今回受賞した3軸触覚センサーチップとほぼ同じものができていた」と中井氏はいう。しかし、量産ができずセンサーを1つ作って実験するのが精一杯で、もちろんロボットハンドに複数搭載できるようなサイズにはできなかったそうだ。それをMEMSプロセスを使用して超小型化し、複数の素子を同時に作ることができるようになり今回の受賞に繋がった。 「超小型MEMS 3軸触覚センサーチップ」は、前述のように2×2×0.8mm(同)と米粒の半分程度の大きさだ。この中に、2つのせん断力センサーと1つの圧力センサーが配置されている。1個のチップが小さいため、例えば複数のセンサーを埋め込んだシートを弯曲させてもチップが壊れないという利点がある。
センサーの構成要素としては、圧力センサー1つと2つのせん断力センサーが柔軟性の高いシリコンゴムでカバーされている。せん断力センサーは、垂直に立った2つのカンチレバー(片持ち梁)が直交した状態で配置されており、それぞれがせん断力のX軸とY軸を検知する。カンチレバーには、ピエゾ抵抗層が形成されている。このピエゾ抵抗は、シリコンに不純物を打ち込んだもので、金属ひずみゲージの10倍位感度がよいと言われているそうだ。また、抵抗の変化を計測するものなので、いわゆるひずみゲージの抵抗変化を検出する回路と同じものを使えるという利点もある。 このチップにせん断力をかけると、シリコンゴムの部分がナナメに変形する。その時にカンチレバーの伸び縮みを抵抗値として検出できるわけだ。圧力を検知する場合は、水平に設置された両持ち梁が下に押されて伸びが生じる。この抵抗値を検出して圧力をセンシングするというのが、「超小型MEMS 3軸触覚センサーチップ」の原理だ。
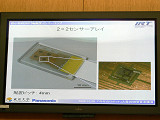
この3軸触覚センサーチップは、センサーの厚さが300nm(1/3,000mm)と非常に薄いため、柔軟性があり曲面への配置が可能となった。そしてチップ化により、任意の間隔にセンサーを配置できるという利点が生まれた。例えば、人の指先は感度が非常に優れているが、それに比べると腕や体幹部は触覚が少ない。そうした状況をロボットで再現したい時、指先にはチップを密に配置し、他はまばらに配置すれば対応できるだろう。使用用途やコストに応じて、自由な設計が可能となった。 「超小型MEMS 3軸触覚センサーチップ」の両端には、300μmの電極パッドが剥き出しになっている。この電極パッドをプリント基板のパッドに接続すれば配線が終了する。その後に、基板全体をシリコンゴムで覆う。というのは、チップ自体が非常に小さいため、人の手が触れると壊れてしまうことがあるためだ。トラブルを防ぐために、全体をある程度の大きさに成型する必要があるそうだ。 成型に関しては、用途に応じてシリコンゴムよりも柔らかい素材であったり、エポキシ樹脂やポリウレタンで埋めることも可能だという。柔らかい素材を選択すれば、人の触覚と同程度の感度が実現でき、エポキシ樹脂のような固い材料を選択すれば撃力の計測が可能となる。
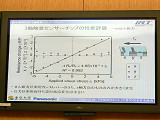
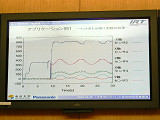
● 「超小型MEMS 3軸触覚センサーチップ」を搭載したアプリケーション例 中井氏は、「超小型MEMS 3軸触覚センサーチップ」を搭載した3つのアプリケーション例を示した。1つ目はロボットハンドに水が半分入ったペットボトルを持たせ、手首を回転する実験だ。ペットボトルを傾けていくと、重心位置は次第に変化する。ハンドが把持した位置と重心位置が離れてくるとモーメントが大きくなるため、ペットボトルはハンドの中で回転しようとする。これを一定の角度に保つためには、重心位置を正確に把握して、ペットボトルを持ち直したり握力を強くしなくてはならない。人は指先の感覚で無意識にこれらの動作をこなしているわけだ。こうした難しい処理も、3軸触覚センサーチップにより把持物体の重心位置をリアルタイムで検出して、握力の繊細な調整が可能となった。ロボットハンドがペットボトルを垂直に持っている時にはせん断力を、水平にした時には圧力を検知するため、ペットボトルの回転に応じ各センサーの値はサインカーブで変化していく。
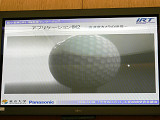
2つ目は、ロボットハンドが重なった茶碗のうち1枚を持ち上げて食洗機にしまう動画を紹介した。茶碗を1枚だけ取るためには、親指に力を込めて茶碗をずりあげなくてはならない。茶碗を軽く水ですすいだあとに、食洗機の中にお茶碗を置く。茶碗を持っている時はせん断力は下向きに働くが、水切りに置いた時は上向きに力が働くのでそれを検知して、手を放す。 3つ目は、ゴルフのヘッド部分に触覚センサーを埋め込んでテストをした例を紹介した。この場合は、センサーチップを埋め込むために固いエポキシ樹脂を用いている。ボールがインパクトした瞬間、ヘッドにかかる圧縮力を圧力から計算している。せん断力からは、クラブヘッドにかかる摩擦力を検知することができる。圧縮力は飛距離に、摩擦力はスピンに影響するため、3軸触覚センサーチップをゴルフクラブの開発に利用できるのではないか? と中井氏は述べた。
現時点では、量産化前の段階として少量製作しているが、今後は半導体製造技術・MEMS技術による生産性の向上・収率の向上を目指していく。具体的には、MEMSファウンドリー利用による試作を開始しており、2010年頃の量産開始を目標に研究開発を続けていく。 ■URL IRT研究機構 少子高齢社会と人を支えるIRT基盤の創出 http://www.irt.i.u-tokyo.ac.jp/ ■ 関連記事 ・ 「タカラトミーが考える、おもちゃとテクノロジーの融合が生み出すもの」 ~「今年のロボット」大賞2008 受賞者講演会【1】(2009/03/11) ・ ロボラボ、「ロボットショールーム」を期間限定オープン ~全国から招致した29体のロボットを一堂に展示(2009/02/09) ・ 東京大学IRT研究機構、ホームアシスタントロボットによる掃除片付け技術を発表 ~衣類を拾って洗濯機へ、失敗しても自力でやり直し(2008/10/24)
( 三月兎 )
- ページの先頭へ-
|