記事検索 |
バックナンバー |
【 2009/04/17 】 |
||
| ||
【 2009/04/15 】 |
||
| ||
【 2009/04/09 】 |
||
| ||
【 2009/04/06 】 |
||
| ||
【 2009/04/03 】 |
||
| ||
【 2009/03/27 】 |
||
| ||
【 2009/03/24 】 |
||
| ||
【 2009/03/18 】 |
||
| ||
【 2009/03/11 】 |
||
| ||
【 2009/03/06 】 |
||
| ||
【 2009/03/04 】 |
||
| ||
【 2009/02/27 】 |
||
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
石井英男のロボットキットレビュー |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Reported by
石井英男
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
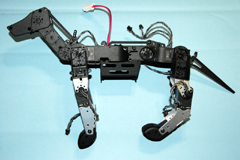
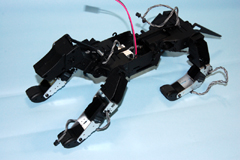
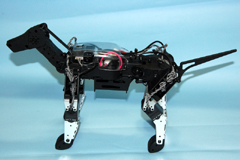
エイチ・ピー・アイ・ジャパン(HPI)から発売された「G-Dog」は、スリムで精悍なボディの犬型四足歩行ホビーロボットキットであり、二足歩行ロボットキット「G-ROBOTS GR-001」に続く、G-ROBOTSシリーズの第二弾となる製品だ。犬型ロボットとしては、ソニーの「AIBO」シリーズが有名だが、AIBOはすでに生産が終了している。G-Dogは、2008年4月に発表され、当初は7月に発売予定であったが、発売が11月に延期された。その間、静岡ホビーショーや全日本模型ホビーショーなどで実機のデモが行なわれていたが、そのスマートなデザインと見事な動きに、足をとめて見入る来場者が多かった。G-Dogは、9自由度の犬型四足歩行ロボットであり、一般的な二足歩行ロボットに比べて部品数が少なく、モーション作成も比較的簡単なので、ロボット入門用としてもお勧めだ。
● 高性能なコマンド式サーボモーターを採用 G-Dogは、375×135×190mm(幅×奥行き×高さ)の犬型四足歩行ホビーロボットキットである。GR-001は、調整済みのコマンド式サーボモーターや樹脂パーツの採用によって、組み立てがしやすく、素早い動きを実現していたことが魅力であった。G-Dogも、そうしたGR-001の長所を受け継いだ設計になっており、サーボモーターとして、Futabaのコマンド/PWM式小型サーボモーター「RS304MD」を採用。プロセッシングユニットとして、同じくFutabaの「RPU-11」を搭載する。バッテリは、6セルのニッケル水素電池(850mAh)を採用する。なお、キットの価格は69,500円だが、組み立て済みの完成品(79,500円)も用意されている。
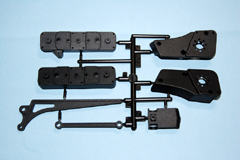
● 上半身から組み立てる それでは早速、G-Dogの組み立て手順を紹介しよう。組み立てマニュアルは、付録CDにPDF形式で収録されているので、最初に印刷しておくことをお勧めする。G-Dogでは、軽くて成型性に優れた樹脂パーツが多用されているが、ほとんどの樹脂パーツはランナーに付いた状態で出荷されている。いわゆるプラモデルと同じだ。したがって、組み立ての際には、ランナーからパーツを切り離す必要がある。作業工程ごとに必要なパーツをランナーから切り離すようにすれば、パーツの紛失も防げるし、作業も戸惑わずに済む。ランナーからパーツを切り離す際には、プラモデル用ニッパーなどを使うと楽だ。切断面にバリが残らないように、丁寧に切り離していこう。
一般的なPWM方式のサーボモーターを採用したロボットキットでは、組み立てを開始する前に、サーボモーターのニュートラル出し(原点設定)を行なう必要があるが、G-Dogで用いられているコマンド式のRS304MDは、あらかじめ原点設定が行なわれており、出力軸にも目印があるので、原点設定を行なう必要がない。マニュアルもわかりやすく、二足歩行ロボットキットに比べてパーツ数も少ないので、初心者でも3~4時間もあれば十分組み立てられるだろう。
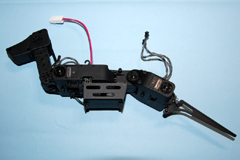
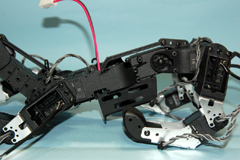
G-Dogの組み立ては、首の部分から行なう。頭や首の部分にはサーボモーターがないが、リンク機構を利用して、腰に配置されているサーボモーターの動きと連動して、頭や首、尻尾が動くようになっている。このあたりの設計は素晴らしい。首に頭を取り付けたら、上半身の組み立てを行なう。このときに、両前肩のサーボモーターも取り付けるが、コマンド式サーボモーターは、あらかじめ各サーボモーターを識別するためのID番号が割り当てられており、場所によってどのID番号のサーボモーターを取り付けるかが決まっている。両前肩の場合は、右がID 5、左がID 8になる。ID番号の違うサーボモーターを取り付けてしまうと、サンプルモーションが正常に動かなくなってしまう。各サーボモーターのID番号は、マニュアルに明記されているので、間違えないように注意しよう。 また、組み立ての途中で、いったんサーボモーターからサーボホーンを外す必要が出てくる。サーボホーンにはニュートラル位置を示す切り欠きがあり、出力軸にもニュートラル位置を示すポッチがあるので、サーボホーンをはめるときに位置をあわせるようにすること。
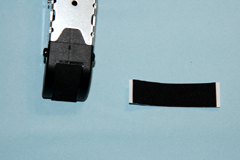
● 下半身と脚の組み立て 上半身の組み立てが完了したら、下半身を組み立てる。上半身に下半身パーツを取り付け、尻尾を取り付ければ、胴体部は完成だ。胴体が完成したら、脚を組み立てる。脚には、アルミブラケットが使われているが、アルミブラケットは左右の区別があるパーツと左右共通のパーツがあるので、間違えないように注意すること。足裏の地面と接地する部分には、付属のスポンジテープを貼る。脚を組み立てたら、脚を胴体に取り付け、中継ハブを装着して、プロセッシングユニットを両面テープで取り付ける。
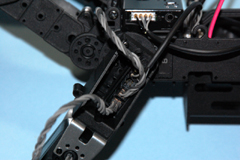
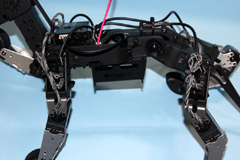
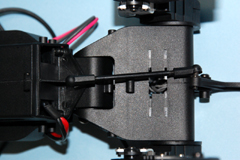
次に、サーボケーブルを中継ハブに差し込むのだが、PWM方式のサーボモーターでは、ケーブルのデイジーチェーン(数珠繋ぎ)や分岐などはできず、コントロールボードの出力端子とサーボモーターを1対1で接続する必要があるので、ケーブルの数が増え、取り回しも煩雑になってしまいがちだ。それに対し、G-Dogに採用されているコマンド式サーボモーターなら、中継ハブなどを利用して分岐が可能なので、ケーブルの取り回しも楽だ。余分なサーボケーブルは折りたたんでタイラップでまとめる。最後に、バッテリを取り付けて、ボディカバーを取り付ければ、組み立ては一通り完了だ。
この後は、ソフトウェアのインストールと初期設定、トリム調整を行なう必要がある。ソフトウェアのインストール方法やトリム調整、サンプルモーションの実行については、後編で紹介する予定だ。また、後編では、オリジナルモーションの作成手順についても解説したい。 ■URL エイチ・ピー・アイ・ジャパン(HPI) http://www.hpiracing.co.jp/ 製品情報 http://www.hpirobot.jp/g-dog/top/index.html ■ 関連記事 ・ HPI、犬型ホビーロボット「G-Dog」を7月に発売(2008/04/01) 2009/01/30 00:10 - ページの先頭へ-
|