記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
「次世代ロボット共通プラットフォーム技術の確立」シンポジウムレポート |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2月26日(木)、東京・秋葉原のアキバプラザにて行なわれた科学技術連携施策群 次世代ロボット連携群平成20年度シンポジウム「次世代ロボット共通プラットフォーム技術の確立」シンポジウムでは、次世代ロボット連携群以外の発表も特別講演として3件行なわれた。順にレポートする。 ● 特別講演1:「WABOT-HOUSEと次世代ロボット」
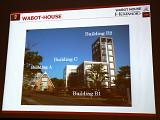
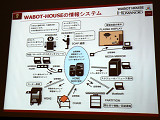
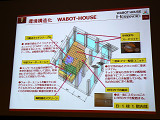
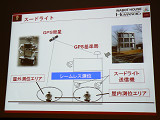
まず環境構造化の観点で行なわれているのが「WABOT-HOUSE」である。家具をRT化し、RFIDやGPSを使って位置情報を提供することで環境知能がロボットサービスを実行する。「WABOT-HOUSE」は可変式の床やロボット専用エレベータなどを備え、家全体がロボットになっている。人間居住空間やリサイクル、省エネも含めた「建築とRT」の繋がり、近未来のライフスタイルを考慮した「生活環境とRT」、そして街への展開も考えた「自然環境とRT」の3つの観点での研究が進められているという。企業や地域との連携、そしてシステムインテグレータの育成も重要視しているという。 近未来の居住空間を考えると、居住環境と就業環境が接近、個人の豊かさは多様化、そのなかで高齢者支援や省エネルギーはどうなるのか、物流も変化するなどなど、さまざまな論点がある。そのような変化のなかでライフスタイルの変化に適応する空間のRT化とはどんなものか。スケルトン・インフィル構造への適応、RFIDタグによる管理、室内測位技術への対応、RT家具、メディアファーニチャ、昔の日本家屋のような可変間取り構造、ホームサーバによる一括管理などを考慮に入れた研究を進めているという。たとえばキッチン設備も、簡単に電源や水道を取り外したり接続できるようになっているそうだ。 RFIDのほか、「スードライト」を使った屋内での位置情報活用技術を示し、ロボットだけではなく、家具や人間の測位技術の重要性を強調した。もしすべての物体の位置が認識できるのであれば、ロボットは物体を目やセンサーで追わなくてもいい。環境側からロボットの知能を高めることができる。今後は企業連携をさらに進めていき、研究開発の提案を行なっていきたいという。
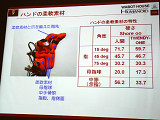
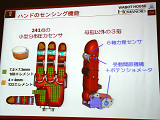
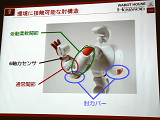
さていっぽう人間共存型ロボットは、安全性、高出力、人間親和性、巧緻性、作業能力(知能)などの機能をすべて同時に実現することが重要だと菅野氏は考えているという。そのようなコンセプトで作られたのが2007年に発表された「TWENDY-ONE」だ。人間とロボットの協調作業についてはさまざまなシーンが考えられる。それらをセンシングするために全身触覚を備えている。上半身には134カ所に触覚センサーを内蔵。安全性のためにも衝撃吸収ゲル剤や受動柔軟関節構造を採用している。 作業設定は、75歳の高齢者、体重49.7kgで上半身重量が31kgの人の起きあがりや車椅子への移乗を助けること。そこでTWENDY-ONEは両手首を使って34kgまで支えられるようになっている。瞬間最大でその力が出せるのではなく、定格でそれなりの時間安定して出力が出せるようになっている。また人と接するロボットなので、見た目も大事だ。外見は全てアウターシェルで覆ってハーネス類は内部に入れた。同時に稼動範囲を人間並みに確保し、挟み込みに対応、柔らかい光沢のある白を採用した。冷却機構も中に入れられている。内部は携帯電話の中のように高密度実装されているという。
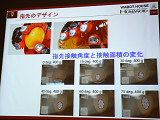
TWENDY-ONEは人間のように爪のついた指を4本持っている。指先を面で接触させ、それを使って指先で物体を扱える。卵なども特別な制御なしにハードウェアの機構で把持することができる。それは指先を持つことで摩擦円錐の範囲が広がり学習による収束条件を広げることができることによるという。また、だからこそ人間はたくみに指先をあやつっていろいろなものを持つことができるのだ。表面素材も吟味を繰り返したそうだ。 腕そのほか関節にはトーションバーを使ったバネが入っている受動関節構造となっている。かかっている力はバネの変位で読み取ることができる。手は18種類の把持形態がとれる。指が4本になったのは人間と握手するときに同じ幅にしたいというのが理由だったという。また関節を柔らかく作っているが精度を出せるように、工場での組み立てや人間と一緒に作業するときには環境に肘を接触させるようになっている。指先の力センサーと大きな柔らかさと巧みさを実現できる肘構造を採用したことで細かい作業も可能になったという。移動部分は全方向移動機構の台車となっている。真横に移動できるのは重要だという。
作業能力に関してはビジョンとデータベースを用いる。工場あるいは家庭で使うのが前提であり、未知の環境にとつぜん行くことはないと考えたことから、シナリオベースで作業は行なうこととしている。なおこのロボットのデモンストレーションについては2007年11月に行なわれた報道公開時の記事を参照されたい。人間が主でロボットがそれに追従する動きが基本になっている。信頼性やメンテナンスにはさまざまな課題が残っているそうだ。いろんな部品の寿命曲線も考慮に入れられており、全てデータのログをとっているという。個々人への対応拡大、緊急時への対応なども課題である。 最後に菅野教授は、「安全性や個々人への対応などは実証実験をやらないとわからない」と述べた。「また産業の現場と学の連携が重要だが、そのなかで官がどこまで支援できるか」と問いかけた。 ● 特別講演2:「トヨタ・パートナーロボット」
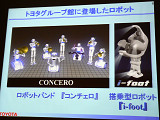
i-footは、ロボットに乗りたいと考える「ガンダム世代」の若手技術者たちの熱意で実現した。トランペットを吹くロボットは、実際に空気を送り出し人工唇を震わせて、ハンドでピストンを押して演奏している。もっとも苦労したのは人工唇だったという。高木氏は開発途上の様子、東京芸大のオーケストラとのコラボの模様などを動画を交えて紹介した。普通は息継ぎのタイミングを利用している指揮者と合わせて演奏するのが難しかったという。
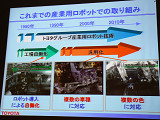
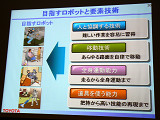
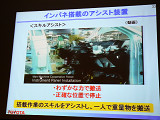
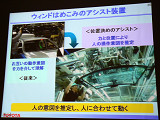
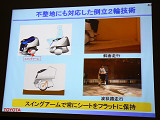
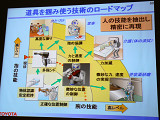
日本の出生率は1.3程度であり、少子高齢社会の到来が予想されている。社会制度からの対策もあるが、技術屋としては科学技術から役に立つことを考えるのが常道である。ロボット技術はそのなかの1つだ。ニーズが多様化・高度化してくると従来の機械では解決できない課題が増えてくるが、そこに対応することがロボットに求められている。たとえば生活空間での家事補助や移動補助だ。これまで製造ものづくり支援に使われてきた技術を介護支援などに使うことが期待される。パーソナル移動支援は「Bed to Bed」を目指し、人間が行けるところはどこでも行けるようなもの、さらに持ち運びできるパーソナルモビリティの実現を目指している。介護医療現場の活用も用途の1つだ。患者、介護・看護側双方をサポートすることが求められている。 これまで、50kg以上ある車のインパネなど重量物を車に搭載するアシストロボット、ウィンドウの接着など複数の技能を制御しなければならない熟練を要する作業をアシストするロボット、人の意図を推定し、人に合わせて力と位置制御を協調するロボットなどをトヨタでは開発してきた。また、モーターショウなどでパーソナルモビリティを発表してきた。「モビロ」は2つの車輪が別々に動く独立サスペンション機構であるスイングアームを採用することで不整地も走行できるようになった。乗っている人は傾きをそれほど感じずにいられる。
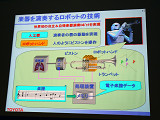
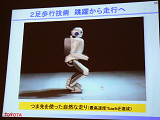
いっぽう若者向けに開発している持ち運びができるパーソナルモビリティが「Winglet」だ。占有スペースは歩行者と同じくらいで、軽快に乗ることのできる立ち乗りモビリティである。自律移動技術としては介護犬ロボットで開発を進めている。音声認識でしてもらいたいことを把握し、障害物をレーザーレンジファインダーで発見し、リアルタイム経路計画をしながら、ステレオカメラで画像認識をして、ハンドを使って軽いものならもってきてくれるロボットだ。トヨタ会館の案内ロボット「ロビーナ」は、さらに自分で地図を生成できるロボットである。 さらに全身運動生成技術を磨くために開発されたのが走る二足歩行ロボットである。時速7kmで走行し、走っているときも外力に対して着地位置補正を行なうことができる。バイオリン演奏ロボットは、道具を使う双腕協調や指の制御技術のために研究開発されたロボットだ。指先はビブラートがかかるように機構も工夫されている。 ロボットはさまざまな技術から構成されている。実用化においてはロードマップを共有した産官学連携が必要であると述べて、IRT研究機構の成果を紹介、未来のサステナブルタウンでの暮らしの世話役や気軽な移動などをサポートしていきたいと述べた。
● 特別講演3:「医療・福祉ロボットの展望」
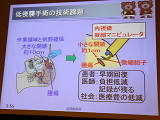
最近は内視鏡手術の増加に伴い、医師の負担が増えてきている。ここでロボットが活かされる。これまでは心臓を動かしたままの状態で数mmの血管を十数針縫うことは非常にうまい医師でなければできなかった。だが、ロボット技術を使うことで、ロボットが心臓の拍動に追従することで、内視鏡から見ると止まっているかのような状態で手術を行なうことができる。「心拍同期型手術ロボットシステム」だ。これはロボット技術からすれば従来の制御問題の内で、古典的な問題である。今は、うまく縫えることもあるがなかなか難しい、という段階だという。
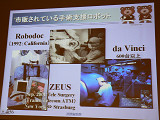
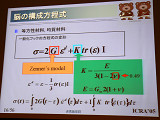
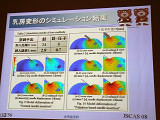
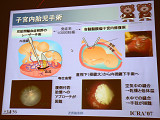
これからはメカニカルな部分だけではなく知恵の時代になるという。いま医師はがん細胞と正常細胞を力学的に触ってみわけている。これと同じことがロボットにもできるはずだという。健康な細胞か癌細胞なのか、ロボットが事前に作られたモデルを使って触診するのである。藤江教授らは、どのくらい力を加えたら脳が変形するのか、それを数式で書いた。パラメータを決めて、6次の運動方程式で、力と変位を表現することに成功した。たとえば肝臓癌では肝臓に針を刺し、癌を針で焼いてしまう(穿刺治療)。その針を指したときに対象である肝臓がどのように変形するのか。数値モデルで力と変位を表現する。臓器は連続的には変形しない。たとえば針は、あるところまで指すと、ぶつんと中に入り込む。そのときにうまい医師ならば的確な場所を刺せるが、それには長年の訓練、経験が必要となる。だが6次の偏微分方程式を解くことはロボットには容易である。うまく臓器を数値モデル化できれば、ロボットが医師を助けることができる。 藤江氏らは肺や乳房のモデル化も行なっている。一番力学的なモデル化が簡単なのが脳で、その次が肝臓、さらにその次が肺であり、乳房が一番難しいそうだ。なぜなら人の乳房は生理周期によって硬さがかわるからである。早稲田大学は医学部を持っていないので、他大学と共同で研究を行なっている。今は技術はできたが、これからどう運用するかという段階になっており、ロボット運用システムを構築することが重要だという。 昨年、日本ロボット外科学会ができた。医学と工学が連携して学会がしっかりエビデンスを出そうという試みをこれから実施していく予定だという。混合診療導入や医療特区導入はロボット手術においては追い風となっているそうだ。ロボットの応用は「いよいよ本番に入っている」と藤江氏はまとめた。
■URL 総合科学技術会議 科学技術連携施策群 http://www.jst.go.jp/renkei/ ■ 関連記事 ・ 「次世代ロボット共通プラットフォーム技術の確立」シンポジウムレポート ~ロボット技術の未来を模索した4年間の成果とこれから(2009/03/03)
( 森山和道 )
- ページの先頭へ-
|