「第28回マイクロマウス中部地区大会」レポート
~84台の自律型ロボットが知能とスピードを競う
 |
| 第28回マイクロマウス中部地区大会 |
10月25日(日)、名古屋工学院専門学校の6号館において、第28回マイクロマウス中部地区大会が開催された。主催は、マイクロマウス委員会中部支部、共催は、財団法人ニューテクノロジー振興財団。
マイクロマウス競技は、小型の自律ロボットを未知迷路をスタートからゴールまで通過させ、その知能と速度を競う競技だ。1980年に第1回全国大会が開催されて、今年で30年目を迎える。全国各地に支部があり、秋に地区大会が開催されている。中でも中部地区は一番歴史があり継続して活発な活動をしている。
この30年の間に、迷路を走破する以外にもさまざまな競技が派生してきた。今年から、従来の1/2規格の迷路を走る“ハーフサイズマウス”が正式競技となる。公式サイトでは、従来のマイクロマウスを“マイクロマウスクラシック”、ハーフサイズは“マイクロマウス(ハーフサイズ)”と表記している。中部地区大会では、マイクロマウスクラシック競技、ハーフサイズ競技、迷路の周囲を走るタイムを競う「支部サーキット」、トーナメント形式で直線スピードを競う「ロボスプリント」、ライントレースで周回タイムを競う「ロボトレース」の5競技を実施した。
 |  |  |
| マイクロマウスクラシック競技 | 支部サーキット | マイクロマウス(ハーフマウス)競技 |
 |  |  |
| ロボスプリント競技 | ロボトレース競技 | 9時から続々と参加者が集まり受付開始 |
 |  |  |
| 控え室で最終調整を行なう参加者達 | 解放された迷路で試走を行なう | 控え室や会場で盛んに情報交換が行なわれていた |
 |  |  |
| 競技開始前にスタッフが迷路図と照らし合わせて、迷路を完成させる | スタートスイッチを押した後、マウスはセンサで周囲の状態を判断しながら迷路を進む | 1/1000秒を争う競技は見ている者も緊張させる |
 |  |  |
| 審査委員の方々 | 田代泰典氏(ニューテクノロジー振興財団) | 会場となった名古屋工学院専門学校の6号館 |
●24台のマウスが1/1000秒を競った「マイクロマウスクラシック競技」
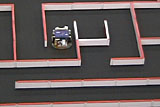
マイクロマウスクラシックに使用される迷路は、1区画18×18cmのブロックが16×16で構成されている。迷路の1辺が3m近いサイズとなるので、一般家庭にはもちろん、学校等でも常設は難しい。そのため、参加者の多くは、8×6や8×16の小さな迷路を用意して開発をしている。フルサイズの迷路で走行できるのは貴重な機会なので、県内だけではなく関東や北陸からの参加者も含め24台が出場した。
マイクロマウスクラシックでは、ゴールは迷路の中央と決まっている。スタート地点から出発したマイクロマウスは、第1次走行で迷路内を探索しながら走り、マップを記憶してゴールまでの最短経路を探し出す。探索を終えると、2回目以降は、最高速度でゴール目掛けて突っ走る。持ち時間7分以内で5回の走行ができる。
今大会は下記の迷路が使用された。青ラインが西回りが56歩23折り、赤ラインが南周りで54歩25折りになる。この一番の魅力は、マウスが複雑な迷路を一気に走り抜けるところにある。もうひとつは、この小さなマウスが非常に「賢い」ということだ。未知の迷路の中から最短経路を探すためにマウスが動き回っているようすをじっくり観察すると、個々のマウスの「賢さ」が見えてきて非常に面白い。マウスは、センサーで壁の有無を検知して、マップを作成している。それがエキスパートクラスのマウスになると、それまでの走行データから、「この先の区間は行き止まりだと知っている」という動きをする。こうした点が見えてくると、マイクロマウス競技の観戦が俄然、面白くなる。優勝したXT-1(加藤雄資氏/名古屋工業大学 ロボコン工房)の探索動画に、該当部分に[←ここ]マークを入れておいたので、注目してほしい。よく見ると、他にも「あっ、賢い!」というポイントが見つかるはずだ。
 |  |  |
| マイクロマウスクラシックの迷路。代表的な最短経路は青:56歩23折、赤:54歩25折 | 優勝したXT-1(加藤雄資氏/名古屋工業大学 ロボコン工房) | マイクロマウスクラシック競技入賞者 |
 |  |  |
| 【動画】XT-1(加藤雄資氏/名古屋工業大学 ロボコン工房)の第1走行。賢い探索に注目してほしい | 【動画】XT-1は3回目の走行で5秒835を出し、会場を沸かせた | 【動画】XT-1が走るごとに自己記録を更新。5回目の7秒683が優勝記録となった |
 |  |  |
| 【動画】雪風・改(中島史敬氏)の第1走行。中島氏は中部支部の委員でもあるため、走行中に競技ルールの解説をしている | 【動画】雪風・改3回目の走行。記録は5秒994。第1走者だったので、この記録を目指して競技が進行した | 【動画】虹孔雀(宇都宮正和氏)の4回目の走行。記録は6秒561で3位に入賞。多くのマウスが西回りを選ぶ中で、南周りを選択 |
| 順位 | ロボット名 | 操作者 | グループ名 | ベストタイム | 1回目 | 2回目 | 3回目 | 4回目 | 5回目 |
|---|---|---|---|---|---|---|---|---|---|
| 1 | XT-1 | 加藤雄資 | 名古屋工業大学 ロボコン工房 | 00:05:729 | 00:52:880 | 00:07:406 | 00:05:835 | 00:05:780 | 00:05:729 |
| 2 | 雪風・改 | 中島史敬 | 00:05:994 | 00:51:462 | 00:06:202 | 00:05:994 | R | R | |
| 3 | 虹孔雀 | 宇都宮正和 | 個人 | 00:06:561 | 00:54:844 | 00:07:937 | 00:06:769 | 00:06:561 | 00:06:969 |
| 4 | こじまうす5 | 小島宏一 | 京大機械研究会 | 00:07:076 | 01:00:877 | 00:08:051 | R | 00:07:335 | 00:07:076 |
| 5 | 星影 | 太田航佑 | 名古屋工学院専門学校 | 00:07:956 | 01:01:914 | 00:11:743 | R | 00:07:956 | R |
続いて行なわれた支部サーキットは、迷路内の最外周を2周走り直線のスピードと制御を競う。シンプルに見えるが、小さなマウスが長い直線を正確に走るのはかなり難しい。小型軽量マウスが、コーナーを曲がりきれずに壁を破壊する場面も見られた。
この競技もXT-1(加藤雄資氏/名古屋工業大学 ロボコン工房)が2位に1秒以上の差をつけ断トツのスピードで優勝した。XT-1は、走る毎に記録を更新、3回目の7秒683が優勝記録となった。田代委員長から、「ストレートの帝王」とコメントがあった。
 |  |  |
| 【動画】2位のこじまうす5(小島宏一氏/京大機械研究会)。1回目の走行で、9秒287を出した | 【動画】優勝したXT-1(加藤雄資氏/名古屋工業大学 ロボコン工房)の3回目の走行。記録は7秒683 | 支部サーキット競技入賞者 |
| 順位 | ロボット名 | 操作者 | グループ名 | ベストタイム | 1回目 | 2回目 | 3回目 |
|---|---|---|---|---|---|---|---|
| 1 | XT-1 | 加藤雄資 | 名古屋工業大学 ロボコン工房 | 00:07:683 | 00:08:262 | 00:07:734 | 00:07:683 |
| 2 | こじまうす5 | 小島宏一 | 京大機械研究会 | 00:09:287 | 00:09:287 | R | 00:09:335 |
| 3 | 虹孔雀 | 宇都宮正和 | 00:09:519 | 00:09:595 | 00:09:519 | R | |
| 4 | 星影 | 太田航佑 | 名古屋工学院専門学校 | 00:09:638 | 00:10:251 | 00:09:720 | 00:09:638 |
| 5 | ブルーバード | 大野俊介 | 名古屋工学院専門学校 | 00:09:892 | 00:11:906 | 00:10:082 | 00:09:892 |
●マイクロマウス(ハーフサイズ)に5台が出場
 |
| マイクロマウス(ハーフサイズ)競技に出場した5台のマウス |
今年から正式競技となったハーフサイズには、black eye(宇都宮正和氏)、ロング11号機(小峰直樹氏)、Choi(竹本裕太氏/東京理科大)、MF2009(森永英一郎氏)、Bee(加藤雄資氏/名古屋工業大学)の5台が出場した。
ハーフサイズマウスは、マイクロマウスクラシックのレギュレーションを基準として、すべてのサイズを1/2スケールにした。迷路は1区画が90mm、壁は厚さ6mm、高さ25mmとなる。もちろん、その迷路を走るマウスも寸法が1/2になる。ということは、体積は1/8になるわけだ。ぎっしりと細かい電子部品がハンダ付けされた小さな機体を実際に見ると、その精巧さに驚く。
田代委員長は、ハーフマウスを企画した時に「ロボットのサイズに合わせて、走行スピードも1/2になるだろう」と推定していたという。しかし、参加者の多くは、従来のスピードを落とさずにサイズダウンすることにチャレンジしていると、技術者としての矜持に驚いていた。
このような小さな機体を作ることも難しいが、それ以上に制御の難易度が高いそうだ。機体が小さいと少し姿勢が崩れただけでも、直進や正確な旋回ができなくなるからだ。スタート時にボタンを焦って押すと、その振動で機体が動いてセンシングにエラーがでるくらいシビアなのだ。小峰氏が競技の中で「駐車場の中でカーレースをやるような制御の難しさがある」コメントしていた。
マイクロマウスクラシック競技では、ゴールの地点は迷路の中央4区画と決まっている。しかしハーフマウス競技では、ゴールの位置や区画の大きさは競技会ごとに定める。ゴールセンサーの位置は、事前にサイトで公開される。今回使用された迷路は次と異なる。代表的な最短経路は、青ラインが西回りで56歩21折、赤ラインが南周りで58歩25折だ。南周りで途中からオレンジに分岐するのは、優勝したblack eye(宇都宮正和氏)が選択したコースだ。赤ラインは直線が得意なマウス向けのコースだが、今回は走ったマウスがいなかった。
中部大会では、ゴール地点の上壁を白く内側の壁面を赤く塗装していた。観客からもゴールが分かりやすく、非常によい提案だと思った。これがなければ、一般観客はどこがゴールなのか判断できないだろう。全日本大会でもぜひ採用してほしい。
 |  |  |
| 事前に公開されたゴール情報(公式サイトより転載)。ゴールの入口座標は(XB・Y9)となる | ハーフサイズの迷路。代表的な最短経路は青:56歩21折、赤:58歩25折。 | ゴールの区画は上壁が白で、壁面を赤く塗っている。これは中部支部会ルールで行なっている |
Choi(竹本裕太氏/東京理科大)は、第1走行で迷路の南側を探索してゴールへたどり着いた。第2走行では、現時点での最短経路を走って16秒404でゴールした。3回目の走行は未探索の西側を重ね探索し、迷路情報を補完した。まずは記録を確保してから、4回目、5回目に最適な最短経路で挑戦する作戦だ。
しかし、3回目の走行を終えたマウスを手にした時に、電源ゲーブルを抜いてしまい、データを消去してしまうトラブルが発生。原因は、コネクタがきっちりと刺さっていなかったためだという。残念ながら、Choiの本気走行は見ることができなかった。どんなうっかりトラブルがあるのか、マイクロマウスにかぎらずロボット競技は油断できない。
 |  |  |
| 【動画】Choi(竹本裕太氏/東京理科大 Mice)。モニタで探索や走行パターンの選択を行なう。左のタイヤがモード選択で、右タイヤが決定 | 【動画】Choi(竹本裕太氏/東京理科大 Mice)の第1走行。ゴール後、探索をせずにスタートへ戻った | 【動画】最短距離を走る第2走行。記録は、16秒404 |
ロング11号機(小峰直樹氏)も、重ね探索を採用していた。マイクロマウスクラシックでは、第1走行で全面探索するのが主流だが、ハーフマウスの全日本大会決勝戦は、迷路が32×32と大きいため全面探索をしていては時間が足りなくなる。そこで、とりあえず現在のデータで最短経路を走って記録を出し、スタート地点に戻る時に探索を重ねていく方式を採用しているのだ。ロング11号機は、迷路を3回くらい走ると、全面探索が終了するそうだ。
今回は、第1走行で最短経路を見つけたので2回目以降同じルートを通ったが、帰りは毎回探索しつつ帰還しているのが動画から見て取れる。4回目になると、同じコースで戻ってくるので探索を終了したことが分かる。
 |  |  |
| ロング11号機(小峰直樹氏) | 【動画】ロング11号機(小峰直樹氏)の第1走行。ゴールに辿り着くと探索しながらスタート地点へ戻る | 【動画】2回目の走行。ゴール後に前回とは違うルートを探索しながらスタートへ戻る |
 |  |  |
| 【動画】3回目の走行。ゴールを目指す最短経路は同じだが、帰りはまた違うルートを探索している | 【動画】4回目の8秒531が記録となった。もう探査は終了しているのでまっすぐスタート地点に戻っている | 小峰直樹氏。マイクロマウス歴は11年 |
black eye(宇都宮正和氏)は、車体重量がわずか80g、そのうちバッテリが9gを占める。このくらいのサイズになると、本体のスイッチを押した振動でマウスがずれてしまい、スタート時の姿勢が崩れる。そのため、宇都宮氏は指をマウスの前方のセンサにかざし、非タッチでスタートさせていた。
black eyeは、第2走行で7秒947を出して暫定1位に踊りでた後、4回目の走行で自己記録を0.3秒短縮した。このサイズでコンマ3秒縮めるというのは、生半可なことではない。最後の走行は「自信はないけれど……」といいながら、斜め走行モードにチャレンジ。見事に成功して、参加者や審査員を唸らせた。最終的に、black eyeの7秒577が優勝記録となった。
 |  |  |
| black eye(宇都宮正和氏) | 【動画】black eye(宇都宮正和氏)の第1走行。ゴール後、迷路を全面探索してからスタート地点へ戻る | 【動画】2回目の走行。7秒947でゴールし、周囲を唸らせた |
 |  | |
| 【動画】4回目の走行。ナナメ走行なしの最速走行で、記録は7秒693 | 【動画】5回目の走行。ナナメ走行でタイムを7秒577に縮めた。4回目と走り方の違いに注目 |
MF2009(森永英一郎氏)は、3回チャレンジしたが、毎回同じ所でマウスが壁にぶつかりリタイアした。田代委員長から「再現性が高いですね。安定した機体です」と、微妙な評価を得ていた。
MF2009の次に走行したBee(加藤雄資氏/名古屋工業大学)も壁にぶつかってリタイア。Beeは5回走行したが、毎回違う場所で停止していた。比較対象があると田代委員長のコメントに実感が生まれる。ちなみにBeeは、今朝、完成したばかりの機体だという。加藤氏はクラシックマウスで優勝しているが、XT-1もハーフマウスを念頭において設計したそうだ。電子部品も同じものを使用している。全日本大会までに、Beeをどのように仕上げてくるのか楽しみだ。
 |  |  |
| MF2009(森永英一郎氏) | 【動画】MF2009(森永英一郎氏)の第1走行。3回とも同じところで壁にぶつかった | 森永英一郎氏。Webサイトにマイクロマウス初心者講座を掲載し、若手育成に貢献している |
 |  |  |
| Bee(加藤雄資氏/名古屋工業大学 ロボコン工房)とクラシック競技で優勝したXT-1。基本的に同じ部品を使って構成されている | BeeのUBSシリアルコネクタ。もちろん、自作 | 【動画】Bee(加藤雄資氏/名古屋工業大学)の第1走行。毎回違うところで壁にぶつかってリタイア |
 | ||
| マイクロマウス(ハーフサイズ)競技入賞者 |
| 順位 | ロボット名 | 操作者 | グループ名 | ベストタイム | 1回目 | 2回目 | 3回目 | 4回目 | 5回目 |
|---|---|---|---|---|---|---|---|---|---|
| 1 | black eye | 宇都宮正和 | 00:07:577 | 00:37:783 | 00:07:947 | 00:07:958 | 00:07:693 | 00:07:577 | |
| 2 | ロング11号機 | 小峰直樹 | 00:08:531 | 01:00:259 | 00:08:889 | 00:08:616 | 00:08:531 | 00:08:538 | |
| 3 | Choi | 竹本裕太 | 東京理科大 Mice | 00:16:404 | 00:33:053 | 00:16:404 | 00:32:225 | 00:33:090 | R |
●トーナメント戦で優勝を競う「ロボスプリント」
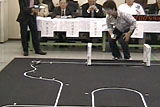
「ロボスプリント」は、マイクロマウス競技会の中で唯一のトーナメント式競技だ。幅45cm、直線8mのコースをゴールまで走るタイムで勝敗を競う。3本勝負で2本先取した方が勝ち上がる。コースの直線部分には、中央に白いラインが描かれているが、ロボットがスタートするエリアにはラインがない。オペレータがスタートボタンを押した後、ロボットは自律でコース上へ進み、ラインを発見してゴールまで全力疾走する。コースアウトや、ゴールエリア内をオーバーランした場合は失格となる。
 |  |  |
| スタートエリア。ここから自律でコースへでて白線を検知する | 幅45cm、長さ8mのコース | ゴールラインを超えたら、エリア内で停止しなくてはならない |
スマッツ株式会社から発売されているロボスプリント用のキットによるワンメイクの部と、一般の部に分かれてトーナメント戦で実施した。競技の結果、村石亘氏(黒い箱および埼玉工業大学)がワンメイクの部を「竜神丸ver.2.5」、一般の部を「疾風」で優勝した。
どちらのロボットも素晴らしいスピードと安定性を見せていたが、特に「竜神丸ver.2.5」は周囲を驚かせていた。他の参加者が、コースを直進できずにリタイヤしたり、10秒~11秒掛かってゴールしたりする中で、「竜神丸ver.2.5」はコンスタントに4秒台の記録を出していた。同じキットを使っているのに、この性能差には驚かされる。競技中も「なぜ、あんなに速いんだ?」と客席から声が上がっていた。
その秘密は、センサーの配置にある。キットをマニュアルどおりに組み立てると2本のセンサーアームは前方に水平に伸びた状態になる。キット付属のサンプルプログラムも、左右のセンサーが白線を検出した時に進行方向を修正するロジックになっている。村石氏は、このセンサーアームの先端をぴったりと寄せる形で組み立てた。プログラムも常に白線をトレースするように修正した。これにより、トレース時にブレ幅を減らしているわけだ。他にもギアのガタつきをなくし、トルクを重視するなど工夫を重ねてキットの性能を引き出している。本誌で以前掲載した「ロボスプリント狭山大会2009」レポートでも、竜神丸のコンセプトについて触れているのでぜひ参考にしてほしい。
 |  |  |
| 【動画】ワンメイクの部 決勝戦。竜神丸ver.2.5(村石亘氏/黒い箱および埼玉工業大学) VS Shooting☆star(太田航佑氏/名古屋工学院専門学校) | 【動画】3位決定戦。F・H・T(藤原匡志氏/名古屋工学院専門学校) VS ED110(村松克法氏/中部大学) | 竜神丸ver.2.5(村石亘氏/黒い箱および埼玉工業大学) |
 |  |  |
| 竜神丸ver.2.5(左)と、マニュアル通りに組み立てたロボットの比較。センサアームの角度がポイント。ギアのガタつきをなくす工夫もしているという | ワンメイクの部トーナメント結果 | ロボスプリント競技ワンメイクの部 入賞者 |
 |  |  |
| 【動画】一般の部 決勝戦。疾風(村石亘氏/黒い箱および埼玉工業大学) VS 仮定R(川上文啓氏/名古屋工業大学 ロボコン工房) | 【動画】3位決定戦。ブラックセイバーAVR(冠者徹也氏/名古屋工業大学 ロボコン工房) VS MS-09T(水野礼人氏/名古屋工業大学 ロボコン工房) | 優勝した疾風(村石亘氏/黒い箱および埼玉工業大学)。直進の安定性を高めるコンセプトは「竜神丸ver.2.5」と同じ |
 |  |  |
| 一般の部 トーナメント結果 | ロボスプリント競技一般の部 入賞者 | 一般の部、ワンメイクの部、そしてロボトレースでも優勝し3冠を制した村石亘氏(黒い箱および埼玉工業大学) |
●技術課題を見据えた機体が登場した「ロボトレース」
ロボトレース競技は、昨年からルールが一部変更になった。基本的な競技内容は、直線とカーブによって構成された周回コースをロボット(ロボトレーサーと呼ぶ)が自律で走行し、タイムを競う。変更点は、コースの最小曲率半径が10cmになったこと、一昨年まで大会の上位を占めていたバキューム機構の搭載が禁止となったことだ。
バキュームを禁止することで、力業でロボットを制御しタイムを短縮するのではなく、プログラムの制御でコーナーをいかに速く攻めるかという、ロボトレース競技本来の趣旨を明確にした。
具体的には、ロボトレースのコースには屈曲率の変化する場所にマーカーが設けられている。このマーカーを活用し、ロボトレーサーが直線とコーナーで適切に加減速して記録を出すことが望ましい。ロボトレースでは、タイヤがラインから外れても、車体の一部がライン上にあればコースアウトとはならない。緩やかなS字カーブはラインを無視して最適経路を直進すれば、タイムを短縮できるだろう。こうした高い知能を持ったロボトレーサーの登場に期待をかけたルール改正だ。
そうした委員会の思いに応え、新しいチャレンジをしたロボットが登場している。
 |  |
| ロボトレースのコース | コース図。今回は最小半径は15cmだった |
今大会では、5位に入賞した「空歩W」(落合佑哉氏/名古屋工業大学 ロボコン工房)が、マーカーを記憶しコースをショートカットする走行にチャレンジしていた。今はまだ、最適なS字クリアまでは実現できておらず、マーカーとマーカーを直線でつないでショートカットする制御方式だ。そのせいで大きなカーブでは、コースアウトしてしまう。全日本までには、プログラムをブラッシュアップし精度をあげていきたいという。
 |  |
| 「空歩W」(落合佑哉氏/名古屋工業大学 ロボコン工房) | 空歩Wの白いアームには、センサの類は搭載されていない。S字を最短でクリアするための機構 |
 |  |
| 【動画】「空歩W」(落合佑哉氏/名古屋工業大学 ロボコン工房)の2回目の走り。普通にライントレースをしている | 【動画】3回目にS字をショートカットする走りを披露。曲率が大きいとコースアウトしてしまうが、最初のS字はうまくクリアしている |
「Crowdia01」(平井雅尊氏/電気通信大学)は、1回目は、電子音で左右のマーカの検知を知らせながら走行している。2回目は、データを元に加減速して直線はスピードを上げて走行。14秒244でゴールした。残念ながら、2回目の走行はゴールエリア内での停止ができずリタイアとなってしまったが、キレイな走りに客席から感嘆のため息が洩れた。3回目は少し速度を落とし、15:310でゴール。こちらが記録となった。
「Crowdia-01」は、センサーに1次元PSDを用いているのが特徴。従来のロボトレーサーはラインを検知するために複数のセンサーを搭載し、それぞれのセンサーの値を見て、ステアリングを切ったりラインに戻したりという制御をしている。1次元PSDを使うと、ラインの幅全体をアナログ値のグラテーションで認識できるため、左右にどのくらいのズレているかを計算してステアリングを切るのでスムースな走り方ができるそうだ。
1次元PSDセンサーは、ロボットランサー競技で3年前くらいから鱒淵祥司氏(マイクロマウスクラシックに出場)と共同で研究し、実用化を目指してきた。昨年度は、全日本大会直前に機体トラブルがあって出場できなかったため、今年が「Crowdia-01」のデビュー戦となる。
 |  |
| 「Crowdia01」(平井雅尊氏/電気通信大学) | 一次元PSDでラインを検知しているのが最大の特徴 |
 |  |
| 【動画】「Crowdia01」(平井雅尊氏/電気通信大学)の1回目。マーカーを記憶しながら走行している | 【動画】2回目の走行。マーカー情報を元に直線スピードをあげ、ステアリングを最適な角度で切ってスムースに走行している |
優勝した「Village stone RT」(村石亘氏/黒い箱および埼玉工業大学)は、コアレスDCモーターを4本搭載した四輪駆動タイプ。前輪と後輪の幅を広げ、直進の安定性を重視した機体だ。2位になった同氏の「Wish」は、旋回を重視した設計だという。全日本までにプログラムを作り込み、マーカーを記憶し直線のスピードを上げて走行する予定。最終的には、コースを記憶した走行を目標に製作しているそうだ。「今年は難しいが、来年はS字の最短クリアをやりたい」と今後の豊富を語った。
 |  |
| Village stone RT(村石亘氏/黒い箱および埼玉工業大学) | Village stone RT(村石亘氏/黒い箱および埼玉工業大学)の2回目の走行。記録は13秒254。この後、3回目の走行でも記録を更新した |
 |  |
| 3位入賞した錦 TR(寺崎清氏/電気通信大学 ロボメカ工房)は、3回の走行を全てオートスタートでクリア。次第にスピードを増していく点に注目 | ロボトレース競技入賞者 |
●「第27回マイクロマウス北陸信越地区大会」は11月8日(日)に開催
11月8日(日)には新潟県立自然科学館で「第27回マイクロマウス北陸信越地区大会」が開催される。全日本大会に出場する人にとっては、フルサイズの迷路で調整する最後の機会となる。
 |  |
| 名古屋工業大学ロボコン工房が特別賞を受賞した | 第28回マイクロマウス中部地区大会参加者達 |
2009/11/6 22:51