記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
「第29回全日本マイクロマウス大会」ロボトレース競技レポート |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
既に、迷路を探索してタイムを競うマイクロマウス競技は本誌でレポートした。本稿では、ラインに沿って走行しタイムを競う「ロボトレース競技」についてレポートする。今大会は国内外から117名がエントリーした。
● ルール改正により競技趣旨を明確に ロボトレース競技に出場する25×25×20cm(幅×奥行き×高さ)以内のロボットを“ロボトレーサー”と呼ぶ。競技は、ロボトレーサーがスタート・ゴールエリアから出発し、白いラインで描かれたコースに従って、1周するタイムを競う。コースは、60m以下の直線とカーブによって構成された周回コースになっている。持ち時間の3分間で3回の走行ができ、最も短い時間が記録となる。直線から円弧、円弧から直線、円弧から異なる半径の円弧に変わるところにはコーナーマーカーがある。 交差点で右左折した場合、2秒以上停止または車体がコースから離れたり、スタート・ゴールエリアで停止しない場合、その回の走行は無効となる。
競技に先立ち委員の飯島純一氏(明星大学情報学部教授)から、ルール変更趣旨について説明があった。このルール変更は、ロボトレース競技の意図が“自律操縦の巧みさとスピードとを競う”点にあることを明確に打ち出すものだという。 この数年、路面とタイヤの接地摩擦を高めるための吸引機構を搭載したロボトレーサーが流行し、参加者はラインに沿って走ることに力を注ぐようになった。しかし、委員会が求めているロボトレース競技の狙いは、第1走行でロボットがライン上にあるマーカーを検知・記憶し、コースを分析して第2走行以降は最適なライン取りで走行してタイムを競うことにある。F1レースのドライバーが、自分のテクニックと車体性能によってヘアピンカーブをどのように攻めるのかを決定するように、ロボットが独自にライン取りして攻めてほしいというのだ。 吸引機構の搭載が高速走行に有利であることは、最近の大会結果によって明らかである。こうした機構を製作するためには高い技術を要するが、多くの参加者が吸引機構に頼り、独創的なメカニズムや制御方式を模索しなくなることを危惧し、ルール改正にいたったという。 例えば、ロボトレースのルールでは「車体がコースから離れた場合、走行は無効となる」と規定されているが、ボディの一部がコース上にあればコースアウトとはならない。緩やかなS字カーブはコースを忠実になぞるのではなく直進したり、コーナーの先にあるコースに応じて、最適なライン取りを計算する技術を委員会は期待しているという。そのためには、あえて車体にレギュレーションぎりぎりのバンパーを装着するなどして、ルールを最大限に活用した走りを見せてほしいそうだ。
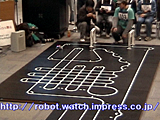
ロボトレーサーは、もともとマイクロマウス競技の難易度が高いため、初心者が比較的参加しやすい種目として始まった。そうした背景もあり、高校生が学校単位で参加していることが多い。その場合、互いに情報交換をして技術向上を図るために、似たような機構のロボトレーサーに仕上がる傾向がある。そこで、同じ機構のロボトレーサーが予選上位になった場合、決勝に進めるロボトレーサーを絞るために、厳密な審査が行なわれるようになったのだ。 予選のタイムがよかったにも関わらず、審査にひっかかって決勝に出場できなかった参加者はがっかりしただろう。しかし、参加者の中には、委員会が意図するところを汲み取り展示したロボトレーサーに他の機体との相違点や工夫した点のメモを添付して、審査員にアピールしている者もあった。もちろん、エントリー用紙でも機体アピールはできる。独創性のある機体をつくることも、それを積極的にアピールすることもモノ作り教育の主旨に基づいていると理解したい。 控え室前に、100台近いロボトレーサーがずらりと展示された様子は壮観だった。陳列されたロボトレーサーを熱心に見つめる参加者も多く、互いによい刺激になったのではないだろうか。 ● 過去最長の決勝コースに苦戦するロボトレーサーが続出 今年のロボトレースは、ルール変更により最小曲率半径が15cmから10cmへと小さくなったため、自律操縦の巧みさがより高いレベルで求められるようになった。とはいうものの、予選のコースは「高校生も完走でき、競技に参加した達成感を得られるように」(大会委員の田代泰典氏談)という設定になっていた。半径10cmも適用されているし、交差点の数も昨年の1カ所から8カ所に増えて難易度が高くなっているものの、半数近くの参加者が完走できた。しかし、23日の決勝でコースレイアウトが開示されたときには、会場内から一斉に笑いを含んだどよめきが起こり、ざわめいた空気はしばらく収まらなかった。 下記に掲載したのが本年度の予選/決勝コースだ。筆者は、これまでロボトレース競技を何度も観戦しているが、前日の予選コースを含め、例年のコースが大会ルール規定の60m相当だと思い込んでいた。うっかり「決勝はコース長のルールも変わったのか?」と誤解してしまったが、実はこれまでは30m前後でコースを設計していたそうだ。 ちなみに今大会の決勝コースは52m。この長い距離とコースレイアウトの複雑さに参加者の多くが、苦戦することとなった。
最小半径が変更になると事前に通達があったとしても、カーブが厳しくなるくらいに考えていただけで、この決勝コースは誰も予想していなかったのではないだろうか? 長い直線とUターンの組み合わせは、加減速の制御が求められる。直線が編み目のように重なりあったユニットは、プログラムで交差点処理が確実にされていなければ、ゴール判定と誤動作してロボットが停止してしまう。長い直線の後にR10を5つ組み合わせたΩ状の連続ターンは、特に脱落が多かった。
もちろん、新ルールのR10をクリアするために、多くの参加者が機体設計を工夫していた。単純に考えても、今までより小回りが利く機体にしなくてはならない。その上で、ソフトを作り込まなければ完走できない決勝コースになっていたのだ。 決勝は、通常ならば予選上位の選手が優勝するという予想を立てて見ているのだが、今大会は誰が完走できるのか分からないという緊張感が客席にも漂っていた。何しろ予選3位の「アジパワー(大橋辰也氏:銀座商店街)」は、ゴール直前のR10が2つ重なっている急カーブで1回目に旋回してリタイヤ。2回目は28秒114で完走して暫定1位に踊り出たものの、3回目もリタイヤしている。予選2位通過の「Moon Baseng(Byeong Joon Moon氏:MAXE & Hz)」は3回ともリタイヤだったのだ。 終わってみれば、予選で1位の「JND DRIFT(Yang Hyunchul氏:ZENTIN.Univ.of Seoul)」が、第2走行でトップタイムを出し、3回目の走行で自己記録を塗り替えて優勝した。しかし決勝を見ている最中、ずっとドキドキと興奮が続いた。 3位入賞したのが、予選で14位だった「琥珀(高橋亮氏:埼玉県立新座総合技術高等学校)」であることからも、予選上位陣を含めて順位予測がつかない荒れたレースだったことが分かるだろう。現時点では、全ロボトレーサーの記録が公開されていないが、例年と比較して完走率が低かったことは間違いない。
過去のコースは、第1走行でもかなりスピードを上げても走ることができた。しかし、今年の決勝はコースの探索をするためにスピードを落とさなくてはクリアできないような設計だった。委員会は、探索用のスピードを持っていないロボットが、第1走行で脱落していくような課題をあえて出してきていた。 距離が伸びたことも影響が大きい。今後は、コース探索の対策に、第1走行が途中でリタイアした場合の処置も必要になるだろう。2回目のトライでコースの最初から探索をやり直すようでは、時間のロスが大きすぎるためだ。今大会では、Charlie(Jung Eui-jung氏:Hanyang University)が、第1走行でリタイアした後にコースを追加探索する制御を取り入れていた。来年は、同様の制御をしてくるロボトレーサーも増えるだろう。 また、委員会が期待する「Ωターンの連続を車体幅を使って直進できる」ようなロボトレーサーが現れて、タイムを大幅に短縮し、観客が興奮するような走りを見せてくれるロボトレーサーが現れるかもしれない。若い技術者の参加が多い本競技会で、今後どのようなチャレンジが見られるか非常に楽しみだ。 ■URL ニューテクノロジー振興財団 http://www.robomedia.org/index.html ■ 関連記事 ・ 第29回全日本マイクロマウス大会「ハーフサイズマウスプレ競技会」レポート ~15台がエントリー、決勝は32×32の巨大迷路に4台のマウスが挑戦(2008/12/15) ・ 「第29回全日本マイクロマウス大会」エキスパートクラスレポート ~自立型知能ロボットが1/1,000秒を競って迷路を駆け抜ける(2008/12/11) ・ 「第28回全日本マイクロマウス大会」レポート(2) ~マイクロクリッパー競技・ロボトレース競技編(2007/12/17)
( 三月兎 )
- ページの先頭へ-
|