記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
「第27回マイクロマウス中部地区大会」レポート |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
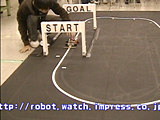
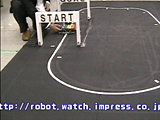
マイクロマウス競技は、小型の自立型ロボット(以下、マウスと呼ぶ)が、迷路内をスタート地点からゴールまで走り抜けるタイムを競う。1980年に第1回全国大会が行なわれ、今年で29回目を迎える歴史あるロボットコンテストだ。全国に5カ所の支部があり、9月~11月にかけて地区大会が開催されている。地区大会で優秀な成績をおさめたマウスは、11月22日(土)、23日(日)に筑波で開催される全日本大会のエキスパートクラス決勝への出場権を得る。 長い歴史の中で、マイクロマウス競技から新たな競技が派生しており、中部地区大会では、ラインに沿って走行しタイムを競う「ロボトレース競技」と、迷路の周囲を走りタイムを競う「支部会サーキット」、直線スピードを競う「ロボスプリント競技」が実施された。 ● さまざまなタイプが登場した「マイクロマウス競技」 マイクロマウス競技に使用される迷路は、1区画18×18cmのブロックが16×16で構成されている。迷路の一辺が288cmと大きいため、なかなか一般家庭に設置できない。そのため、東西からのアクセスがいい中部大会は、全国大会に向けた最終調整を兼ねた遠征者が多く、例年レベルの高い大会になっている。今大会には、九州や関東からの参加者を含め23台のマウスが出場した。競技は、迷路のスタート地点から中央に設けられたゴールまでの最短経路をマウスが探索し、走破するタイムを競う。持ち時間は7分で5回の走行ができる。マウスは事前に迷路情報を持っていないので、第1走行で迷路内を走りながらマップを記憶し、最短経路を探しだす。 今回の迷路【写真1】では、西回り(青ライン)が54歩25折、南回り(赤ライン)が52歩25折になっている。若干、南周りの方が歩数が少ない。だが、全てのマウスが同じルートを走るわけではない。マウスの性能やタイプによって、最短経路が必ずしも最速経路ではない点がこの競技の奥深いところだ。 速く走るためには、多少距離が長くなっても直線が多くコーナーが少ないルートが有利だ。しかし、長い直線を走っていると区間の誤差が累積したり、スピードが出すぎてコーナー前のブレーキが難しかったりと、姿勢制御が難しくなる。 審査員の田代泰典氏(ニューテクノロジー振興財団)は、今回の迷路を見て「直線走行に自信があるマウスは、緑ライン【写真2】で示したルートを選べばタイムを縮められるのでは?」と話していた。
マウスのサイズは、1辺が25cm角で高さに制限はない。とはいうものの、この規格は29年前のもので、現在は手のひらに乗るくらいの小型マウスが主流である。今回出場したマウスは、安定したターン性能を発揮する6輪型、近年トップクラスの主流を占める軽量低重心型、日本で唯一のバキュームマウス、そして今年プレ大会が行なわれるハーフサイズマウスとバラエティに富んでいた。 6輪型マウスを初めて開発したのは、全日本大会で最多優勝を誇る井谷優氏だ。6輪マウス「マイクロマウス3」は、構造的に直進走行時だけではなく、旋回中に内輪がスリップしても外輪の制御によって安定した走行姿勢を保てる。車体が長いので袋小路に入った時は旋回できないため、前後の概念がなく走行できる構造とプログラムになっている。マウスは迷路内を壁がない方に進み、走行中に前後を切り替えるとマップも南北を置き換えているのだという。 現在の主流とも言える小型軽量マウスは、車体重量を軽く重心を低くし、加減速やターン時の負荷を減らして高速走行を狙う。今大会では、中島史敬氏の「雪風」が代表格だろう。このタイプのマウスの問題点は、車高が壁より低いために、どこを走っているのか見えないところにある(単に観戦者がつまらない……というだけなのだが)。サービス精神旺盛な中島氏は、マウスに旗を立てて競技に参加していた。 優勝したのは、米真一氏のバキュームマウス「momoco08」だ。「momoco08」はファンで負圧を発生させ、路面に吸引して高速な移動と方向転換を実現している。これまで、全日本大会で海外勢がバキュームマウスで優勝した例はあるが、日本では米氏が唯一バキュームマウスにチャレンジしている。 小さなマウスの中に、複雑な吸引機構を搭載するのは技術的に難しい。しかも「探索走行時には、ただの荷物」(米氏談)ということもあり、チャレンジする人が少ないそうだ。だが、成功した時の威力は大きい。今大会では5秒470という素晴らしい記録を残した。米氏はマイクロマウス歴7年、バキュームタイプの開発を始めて今年で6年。今回が初優勝となった。 以下、上位マウスと印象に残るマウスの走りを紹介する。今回、動画撮影時にノイズが入ったようで、走行中にコマが一瞬停止している。マイクロマウスはスピードが何より魅力の競技であるのに大変申し訳ない。
マイクロマウス競技を主催する財団法人ニューテクノロジー振興財団は、新たな技術チャレンジを目指し、現行の迷路を1/2サイズにした「ハーフサイズマイクロマウス競技」を2009年度から実施すると発表している。今年の全日本大会では、プレ競技会が行なわれる。 中部地区大会には、小峰直樹氏がハーフサイズマウス「ロング10号機」で現行の迷路に挑戦した。従来の迷路を走ると、壁までの距離が遠くなるためセンシングが難しく苦戦していたが、見事、探索に成功してゴールへ到達した。 また、今回走行しなかったものの葉山清輝氏が現行サイズの「KNCT-MM1」と同じ構造でハーフマウスを製作していたのも興味深かった。両氏のプレ大会参加に期待したい。
● 新ルール適用の「ロボトレース競技」 ロボトレース競技は、直線とカーブによって構成された60m以下の周回コースをロボットが自立で走行するスピードを競う。持ち時間の3分間で3回走行ができ、最も短いタイムが記録となる。この競技に参加するロボットをロボトレーサーと呼ぶ。ロボトレーサーの規格は幅25cm、長さ25cm。高さ20cm以内と定められている。元々は、マイクロマウス競技のレベルが高くなり初心者が参入しづらくなったため、入門者用として新設された競技だという。だが、その後ロボトレース競技も知能化が進み、バキューム機能を搭載したマウスが全国大会の上位を占めるなど大きく進化してきた。 ロボトレース競技は、今年から規定の一部が変更される。コースは、最小曲率半径がこれまでの15cmから10cmになり、それに伴いコーナーマーカーとスタート/ゴールマーカーの長さが半分の4cmになっている。何より大きな変更は、昨年まで大会の上位を占めた多くのロボトレーサーが搭載しているバキューム機構が禁止となった点だ。 このルール変更の趣旨について、田代氏から説明があった。 この数年の傾向としてバキュームで吸引してコーナーを曲がるロボットが増え、技術的完成度が高まり競技の上位を占めるようになった。田代氏は、「バキューム機構は好タイムを出すための面白いアイデアだが、これは“力業”でカーブを曲がるという発想だ。ロボトレース競技は、コーナーをいかに速く綺麗に走るかをプログラミングで制御することが課題となっている」と述べる。 競技の趣旨として、コースの屈曲率の変化する場所に設けられてあるマーカーを活用し、ロボットが第1走行でコースの特性を記憶し、第2走行では直線とコーナーで加減速を制御して、よいタイムを目指してほしいと願っているそうだ。既に上位レベルの参加者はそうした制御を実装している。だが、田代氏の要求はもっと高い。 競技ルールではタイヤがラインから外れても、車体の一部がラインに掛かっていればOKだ。それを活用して、緩やかなS字カーブはラインを無視して最適経路を計算し直進するようなロボトレーサーに登場してほしいというのだ。今回のルール変更は、そのための課題設計ということだ。
今回は13台のエントリーがあったが、ゴールしたのは5台といささか寂しい状況だった。参加者達が全国大会までにどれだけブラッシュアップしてくるのか楽しみだ。 優勝したのは、昨年度の全日本大会で国内1位の成績を納めた桑迫真広氏の「漆風・改0」だった。今年はバキューム機構を外したためにスピードは2割減というが、14秒891の記録を出した。だが、このタイムは桑迫氏にとっては不本意だったようだ。競技後に機体をチェックしたところ、タイヤに貼ったシリコンシートがギアに干渉していて、本来のスピードが出なかったらしい。「あと2秒は短縮できたのに……」と残念そうだった。
ストイックな参加者が多いロボトレース競技だが、毎回、ユニークなロボトレーサーも現れる。松永康生氏の「トビーマジック4」は、木琴で「きらきら星」を演奏しながらコースを走った。また、冠者徹也氏の「ブラックセイバーAVR」は、タミヤのプラモデル外装に合わせて、機構設計していた。
● 支部会主催の「支部会サーキット」と「ロボスプリント」 前述の競技とは別に、全国大会では開催されない支部会主催の競技がある。迷路の外周を2周するタイムを競う「支部会サーキット」と、直線8mのスピードを競う「ロボスプリント」だ。支部会サーキットは、直線を走って一番速いマウスを決めようといったノリで始まったそうだ。既に紹介したように、マウスは複雑な迷路を高速走行する。ならば直線を走って曲がるだけならカンタンだと思ってしまうが、なかなかそうはいかない。 マウスは両側の壁をセンシングしてコースの中央を走っているわけだが、スピードを出せば出すほど両輪のモーターを制御して直進性能を保つのは難しくなる。支部会サーキットには、マウスの基本動作となる姿勢制御や旋回とスピードの制御といった技術要素が詰まっているのだ。実際、全速走行すると壁にぶつかってしまうマウスが多かった。この競技も、「momoco08」がバキューム機構の威力を発揮して、7秒839で優勝した。 ロボスプリントは、2台のロボットが8mの直線を同時に走るトーナメント形式の競技だ。1レースで3本走り2本先取した方が勝ち上がる。両者コースアウト等で決着がつかない場合は、じゃんけんで勝敗を決める。くじ運によっては必ずしも最速記録を持つロボットが優勝するとは限らないところが面白い。 ロボトレースの複雑なルートと違い、単に直線を走ってゴール後に停止するだけなのだが、ロボット達はふらふらと蛇行したり、コースアウトしたりと苦戦していた。 実は、ロボスプリントのスタート位置は、コースからはみ出したところに設定されている。スタート地点からコースまでの間には、ラインが描かれていないのだ。そのためロボットはスタート地点から自立で右折または左折して、コースに出て白線を検知しなくてはならない。走りながら白線を検知し、姿勢制御を行なうのはスピードを出した状態ではとても難しいそうだ。 この競技では、村石亘氏の「Try CisseSP」が順当に勝ち上がって優勝した。
ロボスプリントは、シンプルなルールだが極めようとすると奥が深く面白いそうだ。2008年7月に財団法人ニューテクノロジー振興財団およびバンダイロボット研究所の技術協力によりスマッツ株式会社が、「ロボスプリント専用キット」(価格:3,990円)を発売した。「ロボット入門に最適」というので、興味がある人はチャレンジしてみてほしい。 ● 11月22日、23日に筑波で「第29回全日本マイクロマウス大会」開催 「第29回全日本マイクロマウス大会」は、11月22日(土)、23日(日)につくば国際会議場において開催される。入場無料。マイクロマウス競技のスピード感、特にエキスパート決勝の咳払いをためらうほど緊張が張り詰める空気は、動画で伝えることができない。興味のある方は、ぜひ会場に足を運び観戦してほしい。 ■URL ニューテクノロジー振興財団 http://www.robomedia.org/index.html 名古屋工学院専門学校 http://www.denpa.ac.jp/ ■ 関連記事 ・ 「ロボスプリント狭山大会 2008」レポート ~3,000円台のシンプルなクルマ型ロボットで行なう競技会(2008/09/11) ・ スマッツ、スピード競技用クルマ型自律型走行ロボット「ロボスプリント専用キット」を7月下旬に発売(2008/07/04) ・ 「第28回全日本マイクロマウス大会」レポート(2) ~マイクロクリッパー競技・ロボトレース競技編(2007/12/17) ・ 「第28回全日本マイクロマウス大会」レポート ~1/2サイズマウスがエキスパートクラスに登場(2007/11/27)
( 三月兎 )
- ページの先頭へ-
|