記事検索 |
バックナンバー |
【 2008/12/19 】 |
||
| ||
【 2008/12/12 】 |
||
| ||
【 2008/12/08 】 |
||
| ||
【 2008/12/01 】 |
||
| ||
【 2008/11/26 】 |
||
| ||
【 2008/11/14 】 |
||
| ||
【 2008/11/07 】 |
||
| ||
【 2008/11/04 】 |
||
| ||
【 2008/10/24 】 |
||
| ||
【 2008/10/17 】 |
||
| ||
【 2008/10/10 】 |
||
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
高橋敏也の「KHR-2HV“超”初心者入門」 |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
Reported by
高橋敏也
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
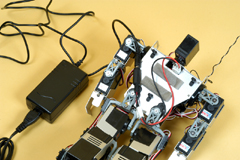
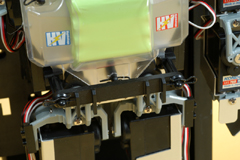
本連載もついに最終回を迎える訳だが、愛すべき我が友人は、今日も今日とてKHR-2HVと共に平常運転である。草木も眠る午前2時、彼は我が家へと電話をして来るのである。朝7時に起床、9時には始業というのに、いったい彼は何を考えているのだろうか? 「ロボットのバッテリには、リポがいいと聞いたんだが……」 友よ、確かにそうだ。リポ、すなわちリチウムイオンポリマーバッテリはコンパクトで大容量、大電流を流せるので、二足歩行ロボットの動力源に適している。しかしこのリポ、信頼できる製品を正しく使わなければ、リスクの高いバッテリでもあるのだ。最悪の場合、激しく燃焼するようなトラブルにまで至る。「リポがいいから使おう」と、簡単に薦められるものではない。だからこそ本連載では安全性などを総合的に判断した結果、KHR-2HV標準のニッケル水素バッテリを使うことにした。 確か我が愛すべき友人にも、そう説明した。ところがまた、どこかで聞いてきたか、あるいはロボット競技会へ行って、参加者がリポを使っているのを見たか。話は簡単、我が友人は要するにリポを「使いたい」のである。そんな訳でまず最初に、リポとその充電器、プラスアルファを紹介しよう。 まずリチウムイオンポリマーバッテリだが、KHR-2HVに接続してすぐに使えるという点から八洲電業の「DLGリチウムイオンポリマー充電池(DLG-PLB703048) 」を紹介する。このバッテリ、11.1Vで容量は800mAhというスペックなのだが、これはRobot Watchスペシャルセットに同梱した「ROBOパワーセルHV Dタイプ(10.8V、800mAh)」と、ほぼ同一のスペックだ。しかし、サイズを比較するとリポの方が小型軽量になっていることが分かる。また、リポの方が大電流を流せるという特長がある。このためロボットの動きが、よりパワフルになるのである。実際にリポとニッケル水素を使い比べてみると、例えばKHR-2HVでサッカーをやる時などは、リポの方がパワフルなキックを繰り出せる。
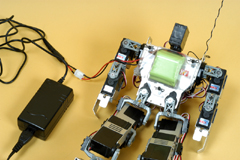
だが、リポは「正しく使う」のが大前提。無理な充放電はバッテリに良くないだけでなく、重大なトラブルの原因となる。そこで「DLGリチウムイオンポリマー充電池(DLG-PLB703048) 」の充電には、専用の「リチウムイオン充電器(DLG-GA-003) 」を使おう。なお、充電器を使用するには電源が必要となる。こちらは「ロボット用電源(SAW60-11.0-5000) 」を使用する。要するに「DLGリチウムイオンポリマー充電池(DLG-PLB703048) 」を使うには、「リチウムイオン充電器(DLG-GA-003) 」と「ロボット用電源(SAW60-11.0-5000) 」をセットで用意すればいいのだ。 また「ロボット用電源(SAW60-11.0-5000) 」は、KHR-2HVの電源としても利用することができる(いわゆる「安定化電源装置」)。ACアダプタのようなこの装置、アダプタケーブルを介してKHR-2HVへダイレクトに接続できるのだ。こうすることでKHR-2HVをバッテリレスで、長時間動作させることができるのだ。オリジナルモーションを作成する際に便利だが、注意して欲しい点が2つある。まず1つはKHR-2HVを長時間稼働させ続けると、モーターが発熱して故障の原因になる場合があること。そしてもう1つは電流量がニッケル水素バッテリとは異なるので、モーションに調整が必要となる場合があることだ。 モーターに負荷のかかる連続稼働は避け、休み休み作業すれば問題ないし、安定化電源でモーションをざっくり作り、それをバッテリ稼働で調整するという手もある。気をつけながら使えばいいだろう。なお、KHR-2HVと「ロボット用電源(SAW60-11.0-5000) 」を接続するには「HVメス-メスケーブル(KBC3100)」と、KHR-2HVに標準付属する「HVバッテリー充電コード」を使用する。また、バッテリレスでモーション作成、調整する際もバッテリ自体は搭載しておこう。こうすることでバッテリ稼働の際と、同じバランスで調整やモーション作成を行なう訳だ。
正しく使えばリポは高性能で便利なバッテリ。ロボットの扱いに慣れてきたら、自己責任の範囲でチャレンジするのも悪くない。なお、ここで紹介した「DLGリチウムイオンポリマー充電池(DLG-PLB703048)」は、全体のサイズこそ小さいものの、「ROBOパワーセルHV Dタイプ」と比較してやや厚みがある。このためKHR-2HVのフロントカウルは標準のものではなく、メーカーオプションである「ラージフロントカウル」との組み合わせがお薦めだ。ラージフロントカウルは内部容積が大きいので、大きめなバッテリや各種センサーの内蔵も可能になっているからだ。 さて、バッテリを標準品以外のものに変更したら、それはもうカスタマイズの第一歩と言ってもいいだろう。そしてKHR-2HVには、さまざまなオプションが用意され、初心者でもある程度は簡単にカスタマイズすることが可能なのだ。最終回ということで、まずはKHR-2HVカスタマイズの入り口を覗いてみよう。 ● KHR-2HVのカスタマイズにチャレンジしてみよう! 乱暴なことを言うとKHR-2HVのカスタマイズは、オリジナルモーションの作成をじっくり探求してからでいいと思う。まずは“素”のKHR-2HVを使い込み、自由自在に動かせるようになってからカスタマイズを考えればいい……と理屈では分かっている。しかし、そうならないのが、人間の不思議なところである。ショップでパーツを見て「まだ早いかな?」と思っても、気がついたら買っている……といった流れになってしまうのだ。筆者の実体験なのだが、二足歩行ロボットと自作PCは非常に似通っている。どちらも「初めての組み立て、セットアップ」が楽しくて仕方がない。完成させて一通り使いこなせるようになったら、まだまだ極めた訳でも無いのに「アップグレード=カスタマイズ」が気になってくる。楽しいからこそ、背伸びを繰り返しながら上へ上へと進んでいくのである。「なぜその“アップグレード=カスタマイズ”が必要なのか?」といった理論など、完全に後回しになるのだ。 しかしまあ、誰に迷惑を掛けるわけでもないのだから、カスタマイズに走ったっていいじゃないかと(迷惑をかける場合は自粛しよう)そう思うのだ。いや、そう自分を納得させつつ、カスタマイズに走るという方が正しいかも知れない。そんな訳で最終回に相応しく、KHR-2HVを完成させて動かせるようになった人が、すぐにチャレンジできるカスタマイズをいくつか紹介しよう。 ● 見た目を一気に変えたいなら「KHR-2 HV用ボディカバー TYPE A-621 GENEX」
しかし、中には「アニメに登場するロボットのように、スタイリッシュなデザインがいいな」と思う人もいるだろう。あるいは「KHR-2HVは自分の愛機であり、大好きなのだが、ほかの人と同じデザインというのはどうか」という人もいるはずだ。KHR-2HVは定番の二足歩行ロボットであり、ロボット競技会へ行っても多くの競技者がKHR-2HV、あるいはKHR-2HVベースのロボットを使用している。そんな中、目立ちたいと思ったら、これはもうカスタマイズである。 ロボットの外装をカスタマイズするのは、実のところ簡単である。例えばアルミフレームやカウル、カバーを塗装するだけでもいい。塗料の乗り具合さえ良ければ、動作に邪魔しない範囲でサーボモーターを塗装してもいい。自信が無ければカッティングシートを駆使してもいいし、あるいはステッカーカスタマイズという手もある。携帯電話用のデコシールを貼ったっていい(スワロフスキーなんてお洒落だ)。
さてこの「TYPE A-621 GENEX」、考え方は極めて単純だ。ポリカーボネート製のカバーを、両面テープなどでKHR-2HVのボディに固定するだけである。このような仕様であるため、人によってはこのようなパーツを「シェル」と呼ぶ。いずれにしても「TYPE A-621 GENEX」を装着するだけで、KHR-2HVにボリューム感が生まれ、デザイン性がグッと向上する。「TYPE A-621 GENEX」のデザインが自分の好みに合うなら、考える時間の無駄である。さっそく買ってきて「カバーの切り出し」に取りかかるべきだ。 そう、この「TYPE A-621 GENEX」、個々のカバーパーツを全て自分で切り出してやらなくてはならないのだ。実はこの切り出し作業が「TYPE A-621 GENEX」最大の難関なのである。KHR-2HVの組み立てや調整と同様、時間をかけてじっくり取り組めば決して難しい作業ではない。だが、美しく仕上げるには根気と時間が必要なことも確かである。デザインカッターやポリカーボネート用のハサミを用意し、じっくり取りかかるべき作業なのだ。 切り出しが終わってしまえばそこはそれ、KHR-2HV用でしかもメーカーオプションのパーツである。取り付け具合も申し分ないし、モーションの邪魔にもならない。「同じボディカバーの人がいたらどうしよう?」と心配するなら、オリジナルの塗装を施せばいいし、このボディカバーをカスタマイズしてもいい(結局、ここを追求して行くと、ボディカバーも自作するようになってしまうのだけど)。
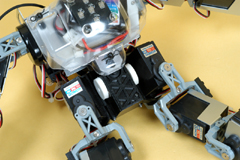
ちなみに「TYPE A-621 GENEX」以外のボディカバーは無いかと聞かれたら、筆者は大日本技研の「TRIDENT」を紹介する。造形の最前線を行く大日本技研の製品とあってデザイン、造形共に次元が異なる世界にあると言っていいだろう。もっとも「TRIDENT」は基本的にKHR-2HVの兄貴分であるKHR-1HV用に設計されたもので(KHR-2HVでも一部を除き装着可能)、しかもKHR-2HV本体に若干の改造が必要となる。初心者にはややハードルの高い製品であることも確かだ。 ● 移動の自由度をアップしたいなら「ピボットターンユニット RSS-01」 KHR-2HVの脚部を動作させつつ観察すると、何かが違うと瞬間的に思うことがある。それは人間との違いなのだが、要するにKHR-2HVは脚部を前後左右、4方向にしか動かせないのである。人間にはボールジョイントにも似た高機能な股関節があり、360度、全方向に脚を向けたり動かすことができる。このため自由度も無限大な訳だが、KHR-2HVの場合はサーボモーターを使用している都合上、そういう訳にはいかない。この違いはKHR-2HV本体を、左右どちらかに向けたい時に大きく影響してくる。人間ならちょっと重心をずらして、脚を回転させ、その方向に向けばいい。ところがKHR-2HVの場合は、脚を前後左右にずらしながら身体の向きを変えなくてはならない。そこでKHR-2HVの上位機種となるKHR-1HVでは、脚部の付け根、ちょうど人間で言うところの股関節部分にサーボモーターが2つ追加されている。もちろん2つのサーボモーターは、脚部を回転させるのに使用するものだ。これによりKHR-1HVはスムーズな方向転換はもちろん、その場で身体の向きを変更することなどが可能になった。 そしてKHR-2HVでも「ピボットターンユニット RSS-01」の追加というカスタマイズを行なえば、KHR-1に近い動きが可能になる。「ピボットターンユニット RSS-01」とサーボモーターを1つ、KHR-2HVの「股部分」に追加すると、そのKHR-2HVは両脚を左右に広げられるようになる。1つのサーボモーターで両脚を回転させるように広げる都合上、左右の脚の回転角度は同一になる。しかし、脚を広げる際に重心を移動させつつ足踏みをすれば、その場で身体の向きを左右どちらにでも向けることができる。また、左右にカーブを切りながら前進後進する、スラローム歩行なども行なえるようになる。
「ピボットターンユニット RSS-01」を追加することで重心が若干変化するため、モーションなどに調整は必要になるが、モーションの自由度は一気に広がる。もちろんこれは競技会、サッカーや格闘技大会で大きなメリットとなる。組み付けはさほど難しくないので、チャレンジする意義は大きいと思う。なお、「ピボットターンユニット RSS-01」は別にサーボモーター1つが必要だということを忘れないで欲しい(KRS-788HV又はKRS-2350SHV)。 ● より高度なコントロールにチャレンジするなら「プログラマブルコントロールボード
KCB-1を一言で表現するなら「ワンボードマイコン」というのが、一番いいかも知れない。といってもこのキーワードですぐにピンと来るのは、アラフォー以上の人々だという気がしないでもないが。それはさておきKCB-1はルネサステクノロジ社製のM16C/Tinyマイコン、64KBのFlashROMと2KBのRAMエリアを搭載したボードだ。プログラムはC言語、あるいはアセンブラで開発することができ、PCとはシリアルUSBアダプタで接続する。開発環境としてルネサステクノロジ社製の統合開発環境「HEW」が付属しているので、目的があるならすぐに開発を始めることができる。筆者としてはKCB-1を見てエンベデッド、いわゆる制御系の学習ボードを思い出した。 そんなKCB-1だが、KHR-2HV(実際にはKHR-2HVに搭載されたRCB-3J)と組み合わせると、より高度な制御、すなわちコントロールが可能になる。というのもKCB-1は7つのアナログ入力ポートを持っており、ここにセンサーを接続すると外部環境の計測が可能になる。その計測データとプログラムを組み合わせれば、KHR-2HVが自律ロボットになるのである。これは後ほど紹介するが、近藤科学の主催する「自律ビーチフラッグ競技会」と大きく関わって来る。 また、このKCB-1へダイレクトにシリアル信号に対応した、新世代のサーボモーターを接続して制御することも可能である。もちろんKHR-2HVに使われているサーボモーター、KRS-788HVを制御することもできる。このため例えばサーボモーターを制御するプログラムの勉強、テストなどをKCB-1で行なうことができる。制御系の学習、C言語の学習にはまさにうってつけのボードなのだ。 一方、KHR-2HVとの組み合わせでは、先程も書いた通り「自律ロボット化」やセンサー類の活用、複雑な条件分岐によるモーションの制御といったことがKCB-1によって可能になる。間口が広く奥の深い二足歩行ロボットであるKHR-2HVは、KCB-1と組み合わせることで、さらにその可能性を広げることができる。「二足歩行ロボットは馴染みが無いけど、C言語だったら」と思っている人も、中にはいるだろう。そういった人にこそ、ぜひKHR-2HVとKCB-1を組み合わせて使って欲しい。 ● さあ、ロボットと一緒にお出かけしよう! KHR-2HVを使い込んで、その設定やモーションに慣れてきたら、多少自信が無くても巷で開催されているロボット競技会に参加してみよう。いや、まずはロボット競技会の見学でもいい。とにかくほかの競技者たちが、どういった準備をして参加して、競技会がどのような流れになっているかを把握し、どんなロボットが参加しているかを見るだけでかなり勉強になる。例えば多くのロボット競技会では、準備するスペースが限られている。従って調整用に持ち込むノートPCはコンパクトな方がいいし、ロボットが一番スペースを取らない状態、すなわち立った状態で保持するスタンドがあった方がいい。割り当てられるコンセントは1つということが多いので、ノートPC、安定化電源、充電器を駆使するならテーブルタップは必須である。また、無線コントローラーの周波数を設定するクリスタルは、最低でも3~5バンド異なるものを持っていた方がいい(無線コントローラーの周波数設定に関しては、ほとんどの場合、競技会の規定に明記されている)。だが、そこには参加者の心構えや事前の準備などは書かれていないのである。
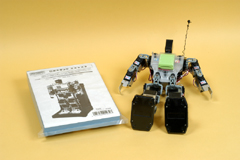
だからこそ事前の見学が大事なのだ。ではなぜ筆者は「とにかく参加してみて」と言うのか? それは実際に他の競技者とふれ合ってもらい、情報交換をするのが競技会に慣れる一番の早道だからなのだ。多くの場合、ロボット競技会は和気あいあいとした雰囲気で行なわれる。何か忘れたり、ロボットが壊れたりすると同じ競技者たちが出来る範囲で助けてくれることは、ごく普通にあることなのだ。もちろん、何か分からないことがあれば、それがロボットに関することでも、競技会に関することでも親切に教えてくれる場合がほとんどだ(ほかの競技者が忙しかったりすることもあるので、そこはそれ、空気を読んで質問するなり話るなりしよう)。 では、実際にロボット競技会へ参加する際、注意すべき点はどんなことか? 筆者の体験談を元に、いくつかポイントを並べてみたい。 ■忘れ物をしない ロボット本体を忘れる人はいないだろうが、バッテリ、無線コントローラ、PCと接続するためのケーブル、アダプタなどを忘れるケースは多い。事前に競技参加前の状態をシミュレーションし、忘れ物が無いようにしたい。 ■装備を1つにまとめられるバッグ 自分の装備が全て入る、旅行用のハードケースなどが適している。二足歩行ロボットも考えてみれば精密機器。運搬中に破損しては目も当てられない。また、全てを詰め込む場合は、緩衝材にも注意を払いたい。バッグの中でロボット本体と機器がぶつかり、破損することは決して珍しくない。隙間がある場合は、エアパッキンやバスタオルなどを入れるといい。そしてロボット本体だけは、ダンボールなどの箱を用意して、運搬中はその中に入れるのもいい。 なお、先程も書いたが競技会の会場で、準備のために割り当てられるスペースは狭い場合がほとんどだ。出来ればコンパクトに「店開き」できるように工夫したい。 ■簡易的な修理が出来る程度の工具 ビニールテープ、両面テープ、カッター、ハサミ、ラジオペンチ、そしてドライバーセット。このあたりはロボット競技会へ参加する際に、必須の工具類と言える。また、競技中にサーボモーターが破損するなどということはよくある話なので、出来ればスペアのサーボモーターを1個、あるいは数個用意して行きたい。 ちなみにKHR-2HVの場合、頭のサーボモーターは飾りと同じ、モビルスーツの脚と同じである(偉い人にはそれが分からんのですよ)。もし、重要な部位のサーボモーターが故障してしまったら、頭のサーボモーターと入れ替えるという手がある。さらにサーボモーターが壊れて、手元にスペアが無い場合は腕のもので代用するといった方法もある。 ■諦めないで、周囲に聞いてみよう 忘れ物をしたり、故障や原因不明のトラブルに見舞われて、自分だけではどうにもならない時は、恥ずかしがらずに競技会のスタッフや周囲の競技者に助けを求めてみよう。ダメでもともと、もし助けてもらえるようなら感謝感激雨あられである。助けてくれた人に感謝しつつ、いつかは自分が助ける方に回ると心に誓うのである。 ■競技会の流れを把握する 競技会場に入って準備スペースを割り当てられたら、まずは「店開き」。ロボットのチェックをしつつ、必要なものが揃っているかを確認する。それから重要なのは、競技会の流れを把握することだ。通常、競技会では競技開始の前に、事前審査や予選が行なわれる。その際にどこへ行けばいいのか、自分の順番はどうなっているのかなどを、しっかり把握しておかなくてはならない。使用すべき無線コントローラの周波数帯もそうだし、そもそも準備スペースで無線コントローラを使っていいのかどうかなど、ルールに関しても把握しておきたい。 ■あくまでも競技会、上を目指そう! いくら和気あいあいといっても、そこはそれ競技会である。他の競技者のロボットと競い合い、優劣を決めて行くのである。ならば競技者には仮に初心者であっても、上位を目指して真剣に挑む義務があるのだ。当然、皆がそういった気持ちなのだから、ロボット競技会で「ビギナーズラック」というのは、まず考えられない。ライバルのテクニックを見て盗み、リスペクトしつつ自らのロボットに反映させ、さらに自ら地道に努力する。上位に食い込める「道筋」が見えただけでも、競技会がさらに楽しくなってくる。 上記のほかにも細かいことを言えばきりが無い。「ネジの予備を少し持っていると安心する」とか、「USBフラッシュメモリを持っていくと、モーションデータを貰うときに便利」とか、「会場で店開きした時、隣にいた競技者は、開始直前までロボットの組み立て作業をしていた」とか……。また、筆者の場合は競技会も大切なのだが、それと同時にほかの競技者と会って話をするのが楽しくて仕方がない。 「ロボット競技会に参加すれば、コミュニケーションの輪が広がる」 これに尽きるのではないかと思っている。ではそんなロボット競技会、どういったものがあって、いつ開催されるかの詳細は本サイトを定期的にチェックしてもらうのが一番だろう。本サイトの記事から競技会のサイトへ飛んで、開催日時や規定を調べる。そして自分の愛機KHR-2HV、あるいはカスタマイズKHR-2HVで参加できるかどうかを調べよう。ここではKHR-2HVかカスタマイズKHR-2HVで参加できるロボット競技会を、大まかに紹介しておく。 ● 二足歩行ロボット格闘技大会 本サイトでもお馴染み、ROBO-ONEを頂点とする二足歩行ロボット競技会の花形である。基本的には2体の二足歩行ロボットがリング上で闘い、ダウンを奪って勝敗を決する。頂上決戦と言われるだけあって、そのレベル、ハードルは相当に高い。というか上位陣の二足歩行ロボットは、市販ロボットよりも、大企業が開発している高性能ロボットに近いと言っても過言ではないだろう。そんなROBO-ONEだが、大会ごとに規定が大きく変化するので注意が必要だ。ロボットのレギュレーションはもちろん、競技会の形式も大会ごとに変化する。例えば2009年春に開催が予定されている第15回ROBO-ONEは「軽量級選抜大会」となることが、ROBO-ONEのサイトで予告されている。また、以前は決勝トーナメントの前に行なわれていた予選が無くなり、認定大会などから決勝トーナメント参加者が選ばれるようになった。要するにROBO-ONEの決勝に進みたければ、日本各地で行なわれる「ROBO-ONE認定大会」に参加して勝ち上がればいいのだ。2008年12月中旬時点で決まっていた選抜大会は大阪、兵庫、三重で行なわれる3大会だった。もちろんこれはどんどん増えていくはずなので、情報を見落とさないようにして欲しい。 さらに日本各地では、小規模ながら二足歩行ロボットの格闘技大会が開催されている(いくつかはROBO-ONE認定大会になるはずだ)。KHR-2HVとなじみ深いところで言うと、メーカーである近藤科学が主催するKHRアニバーサリーの「KHRバトル」などがある。こちらはさすがメーカー主催ということで、KHR-2HVを含むKHRシリーズのロボットが、比較的気軽に参加できるレギュレーションとなっている。 ● 二足歩行ロボットサッカーにチャレンジ もうサッカーでしょう! 自由自在に動ける二足歩行ロボットがあるんだもの、ボールを蹴って敵陣に運び込み、ゴールしたっていいじゃないか! という訳でサッカーである。ROBO-ONE関連では2008年7月に、「ROBO-ONE SOCCER」として1チーム5台(うち1台は補欠)で競技が行なわれた。もちろん「ROBO-ONE SOCCER」もROBO-ONEの派生競技会であり、レベルはかなり高い。一方、KHR-2HVで参加しやすいのは、近藤科学が主催する「KONDO CUP」だろう。こちらは3対3で試合を行なうのだが、ノーマルのKHR-2HVでも参加できる「KHRクラス」と、近藤科学製のサーボモーターを使っていれば、何でもあり(ただしロボットマンシップにのっとっている限り)の「オープンクラス」が設けられている。 どちらも基本的には試合はサッカーであり、ロボットを自由に動かせるようになれば参加することは可能だろう。といっても他の競技者もそれなりに練習をしている訳で、勝ち上がれるかどうかは話が別だ。また、サッカーの場合はチームプレイということになる。チームとしての練習、そしてチームワークも大事になってくる。 ● 自律二足歩行ロボット競技会にチャレンジ KHR-2HVのカスタマイズパーツとして「KCB-1」を紹介したことだし、プログラムなどを元に自らの判断で何らかの目的を達成する「自律ロボット競技会」にも注目して欲しい。ここで紹介するのは近藤科学の主催する「自律ビーチフラッグ」と「自律バトル」だ。「自律ビーチフラッグ」はサッカーフィールドの両端にロボットが位置し、中央にある超音波発生器が内蔵された赤いフラッグを倒すまでの時間を競い合うというものだ。
一方、「自律バトル」の方は、言葉通り自律で格闘を行なう競技である。こちらの競技では距離センサーなどを駆使し、自分の周囲に敵ロボットが入ってきたらそれを感知、その方向に向かって行き、さらに攻撃を繰り出すというものだ。 どちらの競技もいったん始まってしまえば、あとはロボットとプログラム任せとなる。極端に言ってしまえば「プログラムセンスの闘い」であり、すなわち自分の技術に対するチャレンジなのだ。こういった競技会もあるということを、ぜひ憶えておいて欲しい。 このほか日本各地で開催されているのが「練習会」と呼ばれるものだ。これは各地のショップやロボット拠点を中心としたコミュニティが独自に開催するもので、競技会に向けた練習を行ないつつ、ロボット愛好家同士のコミュニケーションを図るものだ。競技会では無いので気軽に参加できるし、情報収集やコミュニケーションには最適な場である。また、サッカーなどのチームメンバーを募るのもいいだろう。 とりあえず競技会や練習会の情報収集を始めて欲しい。それだけでも、かなり気分は盛り上がって来るはずだ。 ● 二足歩行ロボットほど楽しいものはない!
しかし一方で、KHR-2HVなど市販ロボットをベースにしたものも、競技会で数多く見ることができる。ROBO-ONEでは規定に「オリジナルロボットであること」というのがあったため、市販のロボットをそのまま持ち込むことは出来なかった。そこはそれ、初心者だって工夫はする。例えば「布とシール、ちょっとした小物(壊れたCPU)」を貼り付けただけで「オリジナルです」と言い、ちゃんと事前審査をパスしたロボットだっている(あ、そりゃ筆者だ)。 競技会の前日、徹夜でロボットの設定を行なっていた筆者。焦っていたため限界を超えてロボットを連続稼働させてしまい、配線が燃え上がったのも今となってはいい思い出である。もちろん翌日の競技会は棄権、見学のみになってしまったが。 ロボットは楽しい。もちろん高性能なものはそれなりの値段がするし、オリジナルモーションを作成する時など、壁にぶつかることもあるだろう。だが、それでもロボットは楽しいのである。カスタマイズで迷ったり、分からないことがあったら、インターネットで調べてみよう。するといかに多くの人々が、二足歩行ロボットに萌えているか、もとい、燃えているかが分かる。技術的な情報やTipsも手に入る。 そして情報が揃ったら、あとは愛機と共に出撃するのだ。レギュレーションに合うなら、カスタマイズは後からじっくり取り組めばいい。まずは場数を踏もう。コミュニケーションの幅を広げよう。ロボットほど楽しいものはない。 さて、本連載は今回が最終回である。今までお付き合いいただき、本当にありがとうございました。また、ご協力いただいたメーカー、ショップの皆さんにもこの場を借りてお礼を申し上げます。本当ならモーションに関する部分、例えばシナリオ機能なども紹介すべきだったと後悔ばかりの日々である。ではいずれ、どこかのロボット競技会でお会いしましょう。 「本連載を支えてくれた、我が愛するロボットたちにも感謝を」 -秋葉原にて、筆者- ■ 関連記事 ・ 高橋敏也の「KHR-2HV“超”初心者入門」 -Mission10- 「オリジナルモーションを作る&Tipsみたいなもの、その2」(2008/12/12) 2008/12/19 19:00 - ページの先頭へ-
|