記事検索 |
バックナンバー |
【 2008/12/19 】 |
||
| ||
【 2008/12/12 】 |
||
| ||
【 2008/12/08 】 |
||
| ||
【 2008/12/01 】 |
||
| ||
【 2008/11/26 】 |
||
| ||
【 2008/11/14 】 |
||
| ||
【 2008/11/07 】 |
||
| ||
【 2008/11/04 】 |
||
| ||
【 2008/10/24 】 |
||
| ||
【 2008/10/17 】 |
||
| ||
【 2008/10/10 】 |
||
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
高橋敏也の「KHR-2HV“超”初心者入門」 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Reported by
高橋敏也
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
さあ、今回の本題は「オリジナルモーションの作成」である。文字通り「独自のモーション」という訳だが、果たしてそんなものは必要なのだろうか? 丁寧に組み立て、トリムやホームポジションを正しく設定し、サンプルモーションを書き込む。これだけで誰でも自由自在に、KHR-2HVを動かすことができるのだから。 いやいや、オリジナルモーションは、やはり必要である。というかKHR-2HVのような二足歩行ロボットを楽しむ上で、オリジナルモーションにチャレンジしないのは「当選した宝くじを破いて捨てる」ぐらいにもったいない話だ。独自のモーションで、自分なりの表現をロボットで実現する。サンプルモーションを超える動きを、KHR-2HVに与えられるかも知れないのだ。また、ロボット競技会に参加するなら、モーションをチューニングしたり、オリジナルモーションを用意するのは、むしろ当然という話にもなる。 前置きばかりでは面白くないので、とにかくオリジナルモーションを作ってみよう。だがその前に、「モーションとは何か?」を再確認しておこう。簡単に言ってしまうとモーションとは「ポジションの連続再生」である。人によっては「ポジションはアニメのセル画」と説明すると、すぐに理解してもらえる。また、「ポジションはパラパラマンガの1枚」というのも分かりやすい。 要するに少しずつ異なる静止したポーズ(姿勢、ポジション)を連続して再生、まるで動いているように見せたものがモーションという訳だ。サンプルモーションをHeart To Heart3に読み込んだ際、データシート上に配置され、矢印でつなげられているオブジェクトの多くは「ポジションオブジェクト」である。こうしたことを踏まえて、モーションの作成方法を考えてみよう。 一番分かりやすいのは、やはりアニメかパラパラマンガだろう。アニメにしてもパラパラマンガにしても、一連の動きを考える場合、まずキーとなるポジションを想定する。「動作の始まるポジション」と「動作を終えたポジション」だ。その間にどのような動きを入れるか、どう動かすかを考えてポジションを作成して行けばいいのである。極端に言ってしまえば、始点と終点のポジションを用意して、それを繋げてモーションにしてもいい。だが、アニメやパラパラマンガがそうであるように、KHR-2HVの場合も始点と終点だけでは単に直線的な動きが出来上がるだけだ。 例えば始点を「気をつけ」の姿勢とし、終点を「右腕が上がった状態」とする。これだけだと単に「右腕を上げる」というストレートな動きになる訳だが、その間に変化をつけることもできるのだ。始まりと終わりは同じであっても、その間に「いったん真横に振り上げて水平にし、そこから水平移動で前に持っていく」という動きにしてもいいのだ。そのようなモーションでは、以下のようなポジションが必要になる。 1.気をつけ 2.右腕を横方向に水平まで持ち上げる 3.肩を回転させる 4.腕を水平に移動して前に持っていく 5.そのまま振り上げて垂直にする あとはどう自然な動きにするか、あるいはロボットらしい機械的な動きにするかなど、表現を考えればいい。モーションに表現力をつけるには、数をこなして「動かすコツ」を把握するのことが大切だ。まずは簡単なモーションを作って、スピードを変更したり、間に新しいポジションを入れたりして「慣れる」ことを追求しよう。
● オリジナルモーション作りの具体的な流れ まずはオリジナルモーション作りの、具体的な流れを把握しておこう。何はともあれPCとKHR-2HVを準備して接続、Heart To Heart3を起動する。COMポートの設定とシンクロスイッチのチェックを確認したら、準備完了だ。オリジナルモーションの第一歩は、Heart To Heart3のポジションボタンをクリックし、さらにカーソルでデータシート上、任意の場所をクリックすることから始まる。するとデータシート上に「POS1」というポジションオブジェクトが表示されるはずだ。その「POS1」をダブルクリックして、ポジションウィンドウを表示する。この最初のポジションに何らかの姿勢を設定してもいいのだが、基本的なモーションは「ホームポジションに始まり、ホームポジションに終わる」ようにしたい。 ご存じのようにホームポジションは、KHR-2HVのもっとも基本的な姿勢だ。特殊なモーションを除いて、作成するモーションの最初と最後をホームポジションにしておけば、次のモーションに入る時にトラブルが発生しない。従って「POS1」はホームポジションにしておく(配置したばかりのポジションオブジェクトはホームポジションのはずだ)。 そうなると次のポジションオブジェクトから、動作の開始となる。ならばポジションボタンをクリックして、データシート上で……という作業はもう不要なのだ。そう、最初に配置した「POS1」を「コピー&ペースト」すればいいのである。「POS1」が選択された状態で、右ボタンメニューを表示し「コピー」を実行、データシート上の何も無いところにカーソルを移動してやはり右ボタンメニューで「貼り付け」を実行。これで「POS1」の複製が表示される。あるいは「POS1」が選択された状態で、キーボードの「Ctrlキー+Cキー」、次に「Ctrlキー+Vキー」でもいい。PCではごく標準的な「コピー&ペースト」の方法だが、これがデータシート上でも活用できる。 「POS1」の複製が出来たら、それをダブルクリックしてポジションウィンドウを表示し、各チャンネルのスライドバーを移動せさ、KHR-2HVに任意の姿勢を取らせる。急にスライドバーを動かすと、KHR-2HVもそれに合わせて動き、場合によっては転んでしまったり、手でKHR-2HVを支えながら作業していると指を挟んだりするので、十分注意して欲しい。数値を入力して姿勢を変えることも出来るが、数値を入力した場合は最後にEnterキーを押す。姿勢が完成したら、ウィンドウを閉じて1つのポジションは完成だ。 次のポジションも同様に「コピー&ペースト」で用意し、そこから姿勢を設定する。実はここに「コピー&ペースト」でポジションオブジェクトを増やしていく、本当の理由がある。というのもモーションは基本的に「連続した姿勢の変化」である。ところがポジションボタンで新しいオブジェクトを用意すると、それは「ホームポジション」になってしまう。その前のポジション、すなわち姿勢と連続しなくなるのだ。この点、「コピー&ペースト」なら、直前の姿勢を元にして、次の姿勢を作ることができる。もちろん新しいポジションから姿勢を作ってもいいのだが、やはりお薦めは「コピー&ペースト」で増やして行く方法だ。 一通りポジションを作ったら、それらを順番に接続して行く。接続配線ボタンをクリックしてから、ポジションオブジェクトをクリック、さらに次のオブジェクトをクリックする。これでオブジェクト同士が、矢印付きの配線で接続される。問題なければ最後に、始点配置ボタンをクリック後、スタート地点になるオブジェクトをクリックする。すると赤い旗がオブジェクトに表示され、そこがスタート地点、すなわち始点だということが分かるようになる。 なお、接続配線ボタンをクリックして選択した後は、いったん選択ボタンをクリックしないとオブジェクトの選択などができなくなるので注意して欲しい。また、重要なのは途中途中で、モーションを保存することだ。複雑なモーションの場合は「テストモーション01.RCB」、「テストモーション02.RCB」といったように、以前に保存したものとは異なるファイル名で保存するといい。そうすれば後で「こうすれば良かった」と思い直した時に、途中まで作業を遡ることができる。これらはPCで作業をする上では、普通のことだと思う。Heart To Heart3に関しても例外ではないということだ。 後は完成したモーションをKHR-2HV(のコントロールボード)に書き込み、テストしながら細部を修正して行けばいい。姿勢の修正はもちろん、ポジションウィンドウで「SPEED(その姿勢になるスピードを意味する)」を調整してあげよう。ただし、最初はあまり速くしないで、ゆっくり段階的にスピードアップしよう。また、必要があればデータシートの何も無い部分でダブルクリック、データダイアログを開いて名称を設定したり、コントロール入力で無線コントローラーへの割り振りを行なう。 よくある「うっかりミス」としては、大きく2つのことが考えられる。まず1つはモーションを完成させたことに満足して、保存せずにHeart To Heart3を終了させてしまうこと。そしてもう1つはHeart To Heart3上で修正したモーションに、書き込みをせずにテストし「あれ、前と動きが変わらないなあ」となることだ。ちなみにモーションを保存せずにHeart To Heart3を終了しても、KHR-2HVに書き込んであれば、それを読み出して利用することができる。ただし、KHR-2HVから読み込んだモーションデータにはオブジェクトの配置や、オブジェクトのプロパティが含まれていないので、見づらくなってしまうのだが。まあ、どちらも落ちついて作業すれば回避できるミスではある。 モーション作成の流れを把握し、慣れてきたら設定値(SET)や分岐(CMP)の活用にもチャレンジしてみよう。この時、サンプルモーションを参考にしたり、一部を流用したりすると便利だし、モーション作りのスキルアップにも役立つのでぜひ試して欲しい。 だが、それより何よりオリジナルモーションを作る上で、絶対に知っておきたい、知っておかなくてはならない機能がKHR-2HVにはある。それが「教示機能」だ。 ● 教示機能にチャレンジ! 教示という言葉の意味を調べてみたら「教え示すこと」と書いてあった。「まんまだな」と思ったが、それはさておき。KHR-2HVのオリジナルモーションを作る上で、間違いなく役立つのが教示機能である。この機能を簡単に説明してしまうと、「KHR-2HVにポーズをつけ、その状態のサーボモーター位置(角度)をHeart To Heart3に取り込む」というものだ。KHR-2HVの姿勢を見ながらスライドバーを移動させたり、数値を入力する必要はまったく無い。自分の手でKHR-2HVにポーズをつけ、そのポーズを記録することができるという訳だ。これなら誰でも簡単に、しかも直感的にKHR-2HVのオリジナルモーションを作成することができる。教示機能を使って細かくポジションを組み立てて行けば、人間的でなめらかなモーションを作成することができるのだ。まず教示機能を使って大ざっぱにモーションを作成し、実際にKHR-2HVを動かしながら細部を調整して行く。これがKHR-2HVのモーション作りにとって、ベストな流れと言っていいだろう。 ではさっそく、教示機能の使い方を見ていこう。まずはいつものようにPCとKHR-2HVを接続し、Heart To Heart3を起動する。KHR-2HVの電源を入れて、COMポートとシンクロスイッチのチェックを確認する。これで準備完了だ。データシート上にポジションオブジェクトを配置し、それをダブルクリックする。ポジションウィンドウが開くところまでは先程と同じだが、この先の作業は異なっている。ウィンドウの下部にある「LINK」という欄に注目して欲しい。これはLINK設定という機能なのだが、プルダウンメニューになっているので、そこから「組み合わせの設定」を選ぶ。すると「指定動作の設定」ウィンドウが開く。さあ、ここからが楽しい。
「指定動作の設定」ウィンドウではチャンネルごとにメニューから項目を選択できるので、使用している全てで「TCH」を設定する。「TCH」は「Teaching=ティーチング=教示」の略称で、「TCH」に設定したチャンネルのサーボモーターは教示モードに入るということだ。ここでは使用しているチャンネル全てを指定するため、KHR-2HV全身を教示モードにすることとなる。もちろん必要に応じて、部分的に教示モードとしてもいい。 ティーチングの設定が終わったら、「名前」の欄に「全身教示モード」とでも入力しよう(自分で分かりやすい名称ならいい)。「名前」の入力が終わったら「OK」ボタンをクリックして、「指定動作の設定」ウィンドウを閉じる。するとポジションウィンドウに戻るので、再び「LINK」欄に注目する。この欄のプルダウンメニューに、先程設定した「全身教示モード」が追加されているはずだ。それを選べば、教示モードに入る準備は完了である。
教示モードに入るにはポジションウィンドウの下部にあるボタンの中から、シャッターボタンをクリックする。すると「TCH」に指定したサーボモーター全てが、「フリー」の状態になる。フリーになったサーボモーターは手動で自由に動かすことができるので、好みのポーズ、姿勢に設定してあげよう。ポーズが出来上がったら、もう1度シャッターボタンをクリックする。するとそのポーズに応じたサーボモーター位置が、ポジションウィンドウに読み込まれる。サーボモーターから位置(角度)を「教わった」訳だ。
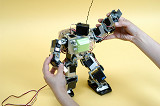
この作業をポジションごとに繰り返し、そのポジションを接続すれば、モーションの出来上がりという訳だ。先程書いたように「全身」ではなく、「TCH」の設定を上半身、下半身に限定したり、右腕、左脚というように細かく分けて用意することもできる。例えば下半身のポーズだけを先に完成させて、次に上半身のみを教示するといったことも可能である。 【1】始点となる「ホームポジション」
【2】ここから教示機能を使い始める
【3】前のポジションをコピーし、変化をつけて行く
【4】さらに変化をつける
【5】コピー&ペーストでポジションを増やし、変化をつける
【6】全体のバランスを考えて、変化をつける
【7】上半身にばかり注意していると、下半身がおかしくなるといったことも多い
【8】前のポジションをコピーしたので、ここでは教示を行なっていない
【9】さらに変化をつける
【10】1人で作業すると難しい場面も出てくる
【11】腕と脚、バランスを考えながら……
【12】たまには頭にも動きを持たせて
【13】そろそろ終わりなので、ホームポジションに近い姿勢に戻す
【14】ホームポジションに戻って終了。ここは教示を使わず、ホームポジションに戻しているだけ
教示機能で注意すべき点は、教示モードに入って手動でサーボモーターの角度を変更しても、可動範囲を超えている時は「可動範囲の限界」まで戻されるということだ。「よし、いいポーズだ」と思っても、限界を超えている場合、それは成立しないのである。シャッターボタンで教示モードを抜ける際に、可動範囲を超えたサーボモーターは、限界位置までピョンと戻るので注意して欲しい。 無限の可能性を持つ教示機能なのだが、実は1つだけ困った点がある。それはKHR-2HVのポーズを作る側、すなわち人間側の問題でもある。実際に教示機能を使い込んで行くと分かるのだが、KHR-2HVのボーズを細かく調整する際に「自分に腕があと2本あったらいいのに」と思う機会がどんどん増えてくるのだ。KHR-2HVの腕にポーズをつけようとしていると、両脚が曲がってきたり動いたり。そういった時は、つくづく手伝ってくれる人が欲しくなる。 もちろん孤独を愛する独身貴族だって、ちゃんと工夫はするのである。KHR-2HVの両肩に開いている穴に紐などを通して上から釣り下げ、1人でも自由にポーズを作れるようにようにする。あるいは上半身と下半身といったように教示モードを切り替えて、細かく設定して行く方法もある。ただし筆者の個人的な意見を言わせてもらうと、やはり手伝ってくれる相棒、友人、知人、恋人、配偶者、息子、娘などがいると作業がスムーズに進む。無理は言わないので誰か適当な友人を見つけ出し、言葉巧みにロボットワールドへ引きずり込んでみよう。そして「KHR-2HVの扱い方を教えてあげる」と称し、作業を手伝わせるのである。どこまで本気かは秘密にしておくが、最後に教示機能を使う時のポイントをまとめておきたい。 ・サーボモーターの可動範囲を常に考えながら教示 ・モーションになった時のバランスを常に考えながら教示 ・「組み合わせの設定」を細かく用意、切り替えながら教示 ・教示は既存モーション(サンプルモーションなど)の修正にも活用できる ・人体の動きを参考にしながら教示 ● Tipsみたいなもの!? 本連載も今回を含めて残すところ、あと2回。あれも書きたい、これも紹介したい、ここはもっと詳しく解説した方がいいんじゃないか、などなど。一抹の不安を抱えつつバタバタ進行して来た訳だが、そろそろ着陸態勢に入らなくては。そこで今回は、筆者が耳にしたKHR-2HVにまつわる疑問にもお答えしたい。言うなればちょっとしたTipsのようなものだ。過去の連載と重複する部分もあるが、それはご容赦いただくということで……。Q.ジャイロセンサーや無線コントローラーの使い方が、分からない A.近藤科学のサイトにある「操作説明書・上級編」や、本連載を参照して どちらにしても、まずは製品に付属するマニュアル、ドキュメントはよく読んで欲しい。さらに近藤科学のサイト内にある「RCB-3J 操作説明書・上級編 KHR2HVSP1.EXE」をダウンロードして、任意の場所で展開する。その中に「RCB-3J操作説明書上級編」というPDFファイルがあるので、それを熟読して欲しい。これで必要な情報は、ほとんど入手できるはずだ。そしてもし余裕があれば、本連載のバックナンバーも参照してもらえると、筆者的には嬉しかったりする。 Q.うちの子(KHR-2HV)は、何かのタイミングでブルブル震え出すので心配です A.それは「ハンチング」という現象、設定次第で回避可能 電源が入った状態のKHR-2HVが、何かの拍子にブルブル震え出す。多くは腕がブルブル震え出し、慌ててちょっと押さえると止まる。このような現象を「ハンチング」と呼ぶ。これはサーボモーターが指示された角度を維持しようとした際に働く、「保持力」が原因で発生する。また、ジャイロセンサーの効果を強く反映させようとして、ミキシングの値を大きく取っている場合に起きやすい。要するにサーボモーターが自分の角度を保持しようとして、過敏に反応した結果がブルブルなのだ。 ジャイロセンサーを搭載しているKHR-2HVで、下半身がブルブルする場合はミキシングの値を小さくする。ジャイロセンサー無しの場合は、ICS機能で上半身の「stretch」、「パルスストレッチ」を1段下げて設定するといい(mission08を参照して欲しい)。ただしロボットはバランスが命である。極端な調整をするとバランスが悪くなって、モーションに悪影響が出るので要注意。少しずつバランスを見ながら調整しよう。 Q.前進、後進などさせた際、微妙に進路がカーブする A.これはどうしても発生するものなので気にしないでおこう KHR-2HVを歩かせた際に、左右どちらかへ微妙にカーブしてしまうのは、仕方がないことだ。というより「微妙にカーブする」程度なら、むしろよく調整されている状態と言ってもいい。というのもKHR-2HVを真っ直ぐ歩かせるためには、かなり厳しい条件があるからだ。その第一がKHR-2HVの歩く場所は、真っ平らでなくてはならない。僅かな傾きでもKHR-2HVの進路は微妙に変化する。だから「自宅でテストした時には真っ直ぐ歩いたのに、別のところへ持っていくと曲がる」というのは、ごく普通にあることなのだ。 またKHR-2HV自体、左右のバランスが「完璧」というのは難しい。サーボモーターも製品によって誤差があるだろうし、ホームポジションやトリム調整が完璧という訳にもいかない。微妙に曲がる程度だったら、気にせず歩行中に進行方向をターンなどで調整してやろう。だが、大きく曲がってしまう場合は、大きくバランスが崩れている可能性がある(平らな場所での話だが)。ホームポジションの見直し、トリム調整などをもう一度確認しよう。 Q.うまく歩かなかったり、よく転んだりする A.ホームポジションを慎重にチェックしよう KHR-2HVのホームポジションを、トリム調整でもう一度調整してみよう。足裏は水平か、正しく直立しているか、とくに脚部のサーボモーター軸が直線上に揃っているかなどなど。要するにホームポジションでKHR-2HVが正しく直立していないと、サンプルモーションでうまく歩かせることは難しいのだ。また、KHR-2HVを歩かせる場所にも注意が必要だ。先程も書いたが真っ平らな場所で、基本的には固くて滑るような表面であることが望ましい。カーペットなどの上では、サンプルモーションであっても調整しないと、うまく歩かせることは出来ないだろう。 Q.無線コントローラー(KRCシリーズ)のスイッチをいれたら、KHR-2HVが勝手に動いたぁぁぁ! A.モーションのコントロール入力値に「0」が割り付けられていると発生するぅぅぅ! 任意のモーションのコントロール入力値(無線コントローラーのボタンなどと対応する値)が「0」になっていると、無線コントローラーの電源を入れた途端、そのモーションが実行されてしまう。このためよほど特殊な目的が無い限りは、コントロール入力値に「0」を割り付けないようにしよう(以前、何を思ったか筆者もこれをやって、盛大に驚いた経験がある)。 Q.RCB-3JとRCB-3HVの違いは何ですか? A.RCB-3Jは「KHR-2HV用のシンプル・バージョン」と考えればいい KHR-2HVに標準付属しているコントローラは「RCB-3J」、そして単体で市販されていたり、KHR-2HVの上位機種であるKHR-1HVに付属するのが「RCB-3HV」である。基本的には「RCB-3HV」はフル機能バージョン、RCB-3JはKHR-2HVパッケージの低価格化を実現するため、上級者向けの機能を省いたバージョンと考えていい。 現在、近藤科学では「RCB-3HV Ver1.02/1.03」や「RCB-3J」を、「RCB-3HV Ver1.1a」に有償アップグレードするサービスを行なっている。KHR-2HVに慣れてきて、もっと高度なことを行ないたい人はこのサービスを利用するといいだろう。ちなみに最新のRCB-3HV Ver1.1aでは処理の高速化が図られているほか、KRC-3ADのアナログスティックのフル活用なども可能である。サービスの詳細は公式サイトを参照して欲しい。 なお、アップグレードすると処理速度が変化するため、一部のモーションが以前と同じようにならない場合もある。現在の状態で満足しているなら、アップグレードを急ぐ必要も無いだろう。 Q.センサーが効いていないような気がする A.取り付け方向と設定を、もう一度確認しよう Robot Watchスペシャルセットにはジャイロセンサー2基と、加速度センサー1基が含まれている。そしてジャイロセンサーはKHR-2HVが傾いた際、姿勢を保持するのに使い、加速度センサーはKHR-2HVが倒れた際に「うつぶせ」か「あおむけ」かを判断するのに使っている。まずどちらのセンサーも、取り付け方向を間違えると、正しく機能しない。センサーの裏表と方向を、もう一度確認して欲しい。 また、センサーは取り付けただけでは意味が無く、それぞれに設定が必要だ。また、センサーの設定を行なうアナログウィンドウでは、センサーが動作しているかどうかもリアルタイムでチェックできる。筆者の経験上、コントロールボードやセンサーは故障の可能性が低いので、もう一度取り付けや設定をチェックしてみよう。 Q.娘がロボットを好きになってくれない(午前2時、酔った友人からの電話にて) A.アプローチ方法を変える 皆が皆、KHR-2HVの無骨なデザインに一目惚れする訳ではない。例えばKHR-2HVに可愛らしい自作の外装を取り付けたり、モーションを邪魔しないよう工夫した服を着せるなりするのはどうだろう? 意外とそんなところから、興味を持ってくれるものです。あと、デコシールなどを娘さんに、KHR-2HVへ好きに貼らせるというのも効果が期待できる(質問も実話なら、回答も実話というところが恐ろしいところ)。 ● 次回で最終回 さて、次回はいよいよ最終回。書き足りなかったTipsや、動き出したロボットをどう楽しむかなどを取り上げて締めくくりたい。いや、本当に大丈夫なのかな? まだまだ書き足りないような気もするのだが。ああ、最終回がどれぐらいの長さになるか、嫌な予感がする……。「中国語でロボットのことを“機器人”と書きますが……なるほど」 -台北でKHR-2HVを見た台湾PCメーカーの人が口にした言葉- ■ 関連記事 ・ 高橋敏也の「KHR-2HV“超”初心者入門」 -Mission09- 「KHR-2HVをどんどん動かす&Tipsみたいなもの、その1」(2008/12/08) 2008/12/12 18:14 - ページの先頭へ-
|