記事検索 |
バックナンバー |
【 2008/12/19 】 |
||
| ||
【 2008/12/12 】 |
||
| ||
【 2008/12/08 】 |
||
| ||
【 2008/12/01 】 |
||
| ||
【 2008/11/26 】 |
||
| ||
【 2008/11/14 】 |
||
| ||
【 2008/11/07 】 |
||
| ||
【 2008/11/04 】 |
||
| ||
【 2008/10/24 】 |
||
| ||
【 2008/10/17 】 |
||
| ||
【 2008/10/10 】 |
||
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
高橋敏也の「KHR-2HV“超”初心者入門」 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Reported by
高橋敏也
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
KHR-2HVも含めて二足歩行ロボットのほとんどは、自由に姿勢や動きを設定することができる。一般的に姿勢のことを「ポジション」、動きのことを「モーション」といったりする。用語に関してはロボットメーカーごとで微妙に異なっているものだが、このあたりに関してはだいたい一緒である。 それはそれとして、問題はどういったポジション、モーションをロボットに設定するかである。手順さえ分かってしまえばポジション、モーションを設定するのは簡単だ。初心者でもすぐにチャレンジできる。さて、そうなると初のオリジナルポジション、モーションにどういった姿勢、動きを選ぶかで、その人の人間性がチラリと見えてきたりする。 例えばロボット系アニメのワンシーンを再現するなんていうのは、誰もがやってみることである。ほかにもお笑い芸人のネタを再現したり、有名人の仕草を真似させたりするのもいいだろう。だが、ロボットの動きには限界があり、人間の仕草を完全に真似しようと思うとかなり苦労する場合もある。 ロボット仲間であり、我が愛する友人の場合も、可動範囲の限界でオリジナルモーション作成に頓挫した1人である。 「あのさ、“コマネチ!”がうまく出来ないんだけど、どうしたらいい?」 どうにでもしてください。それにね、あなたの愛する娘さんは「コマネチ!」が、たぶん分からないと思いますよ。また娘さんに「ロボットと遊べばいいじゃない」って言われるよ、君は。 友人の「コマネチ!」モーションを完成を待っていても仕方ないので、こちらはこちらで地道にKHR-2HVの設定を行なおう。
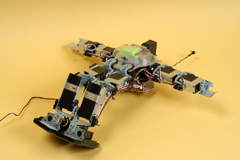
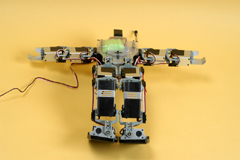
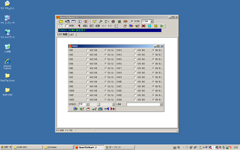
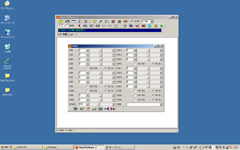
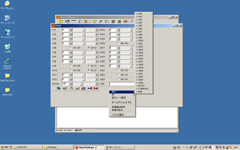
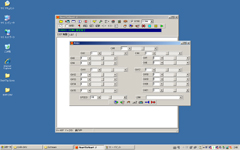
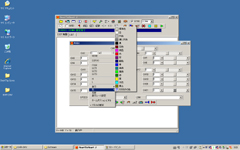
● 今後を左右するホームポジションの設定 さて、ハードウェア的には完成したKHR-2HV、ここからいよいよソフトウェア作業に入る。まず基本的な設定を行ない、それからサンプルモーションをKHR-2HVに書き込んで(データをコントロールボードにロードするイメージ)動かす訳だ。ちょっとだけややこしい部分もあるが、決して難しい作業ではない。落ちついて間違わないように作業すればいいのである。KHR-2HVの設定、その第一歩は「ホームポジション」である。ホームポジションがどういったものかは、その言葉からなんとなく推察できる。そう、KHR-2HVの動作、すなわちモーションを実行する上で基本となるポジション、姿勢のことである。ではさっそく設定してみよう。 まずはKHR-2HVにバッテリを入れて、電源スイッチをオンにしよう。ちなみに「何かトラブルが発生」したら、無理のない範囲で、すぐさま電源スイッチをオフにしよう。トラブルの原因は、後でじっくり考えればいいのだから、とにかく被害が拡大する前にKHR-2HVをストップさせるのだ。また、バッテリの電圧が低下すると、KHR-2HVが奇妙な動作をするようになる。脱力してしまったり、サーボモーターが痙攣するように動いたりするのだ。こうした現象が発生したら、バッテリ切れである。電源をオフにして、バッテリを交換してあげよう。 KHR-2HVの準備が出来たら、Heart To Heart3をセットアップしたPCを、シリアルケーブルで接続する。接続先は前回、ボードカバーに貼り付けた「高速シリアルポートから伸びる延長ケーブル」だ。次にHeart To Heart3を起動し、COMポートの設定、さらに「SYNC」にチェックを入れれば準備完了。「POS」ボタンを選択し、データシート上にポジションを作る。さらにそのポジションをダブルクリックしてポジションウィンドウを開く。 ポジションウィンドウでは、サーボモーターを接続しているチャンネルだけを「SERVO」に指定する。この時、ちょっとだけスクロールバーを左右どちらかに移動すると、KHR-2HV(正確にはKHR-2HVのサーボモーター)が動作する。突然、ビュッと動くので充分注意して欲しい。全てのサーボモーターが動作状態になり、全てのチャンネルが「0」になると、KHR-2HVは両手を広げて草原に寝転がった人のような姿勢になるはずだ。もちろんこれがホームポジションという訳ではないのだが、ここでいったんホームポジションとして設定してしまう。右クリックメニューから「ホームポジションにする」を選択すればいい。 のんびり寝転がった姿勢のKHR-2HVはさておき、次はHeart To Heart3の鳥型ボタン、「トリム調整」をクリックする(噂では「トリム」の「トリ」で、鳥型ボタンになったとか……)。すると調整ウィンドウ(HomeDlg)が開くので、ここからが勝負だ。スクロールバーを移動させて、KHR-2HVを「まっすぐ立った」状態に調整する。そう、この「気をつけ」をした直立不動の状態が、ホームポジションなのである。 最初は大ざっぱに調整し、だいたいの姿勢が出来たら、細かく調整する。左右の対称に気をつけながら、特に注意すべきは足裏をきっちり揃えること、そして脚部のサーボモーター軸を直線に揃えることだ。最初はうまく行かないかも知れないが、落ちついて「1」ずつ調整すれば必ず揃う。なお、スクロールバーの操作ではなく、その隣にある数字を入力しても調整できる。ただし数字を入れた場合は、Enterキーを押さないとサーボモーターが反応しないので注意して欲しい。 充分時間をかけて、納得の行く調整が出来たら、調整ウィンドウを閉じる。ウィンドウを閉じた段階で、調整結果が保存される。この段階で「仮」ではあるが、ホームポジションの設定完了である。
● Heart To Heart3の設定
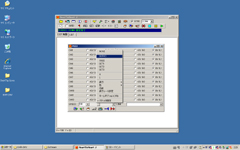
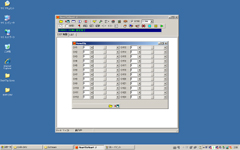
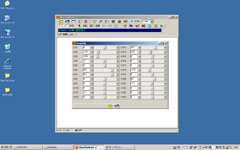
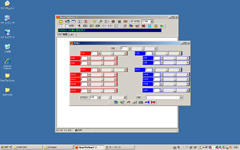
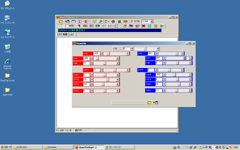
● いよいよサンプルモーションの利用に入るのだけど、その前に…… ホームポジションは、後からでも調整可能だ。実際にサンプルモーションなどでKHR-2HVを動作させて、すぐに転んでしまうとか、必ず右か左、どちらかに倒れてしまうというようなら、それはホームポジションの調整がうまくいっていないかも知れない。そういった時は、トリム調整をもう一度行なえばいい。さて、ここからいよいよKHR-2HVの動作、モーションに関わる作業を行なうのだが、その前にHeart To Heart3のポジションウィンドウを見易くしておこう。まず、ポジションウィンドウの右クリックメニューから「パネルの固定」を実行し、フリーな状態にする。次に使っていないチャンネルを非表示にしてしまおう。さらにチャンネルをドラッグして移動し、KHR-2HVのサーボモーターの位置と合わせてしまう。別に決まりはないので、自分が見易い状態、認識しやすいように並べてやればいい。 満足できる並びになったら、再び「パネルの固定」を選んで、その状態を記録する。これでかなり扱いやすくなったのだが、もう1つ工夫をしてみよう。ポジションウィンドウのチャンネルと、KHR-2HVを対比しやすくしてあげるのだ。ポジションウィンドウのチャンネルには、色を設定することができる。この機能を使ってKHR-2HVの右半身を青色、左半身を赤色といったように設定してあげるのだ。さらに上半身と下半身を色分けしてもいいだろう。 だが、右半身を青色に、左半身を赤色にしたとして、それをどうやってKHR-2HVと対比するのか? あるロボット競技会で見た、ベテラン参加者のアイデアを借用したい。実は簡単な話で、KHR-2HVに赤と青のマークを貼ってしまうのである。幸いKHR-2HVにはデコレーションステッカーが付属している。ちょうど赤色と青色のものがあるので、それをKHR-2HVのボディ、前後に貼ってしまうのである。こうすることでKHR-2HVをパッと見た時、ボディのシール色と、チャンネルの色で直感的に対比できるという訳だ。 KHR-2HVが動作していると、操縦者はKHR-2HVのボディを前から見たり、後ろから見たりすることになる。そんな時「右がこっちだから、膝のサーボモーターはCH13……いや、逆のCH19か?」などと迷っていては、効率よく作業することができない。そこで青色赤色シール作戦をとった訳である。 さあ、もっとも基本となるホームポジションの設定が終わったし、ポジションウィンドウも見易くなった。あとはセンサー類の設定と、実際の動作である。ハードを組み立てる楽しみ以上に、楽しくなってきますよー。乞うご期待!
「終了して構いませんでしょうか?」 -過剰に丁寧なHeart To Heart3の終了確認メッセージ- ■ 関連記事 ・ 高橋敏也の「KHR-2HV“超”初心者入門」 -Mission05- 「KHR-2HV、怒濤の組み立て編、パート3」(2008/11/07) 2008/11/14 19:10 - ページの先頭へ-
|