記事検索 |
バックナンバー |
【 2008/12/19 】 |
||
| ||
【 2008/12/12 】 |
||
| ||
【 2008/12/08 】 |
||
| ||
【 2008/12/01 】 |
||
| ||
【 2008/11/26 】 |
||
| ||
【 2008/11/14 】 |
||
| ||
【 2008/11/07 】 |
||
| ||
【 2008/11/04 】 |
||
| ||
【 2008/10/24 】 |
||
| ||
【 2008/10/17 】 |
||
| ||
【 2008/10/10 】 |
||
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
高橋敏也の「KHR-2HV“超”初心者入門」 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Reported by
高橋敏也
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
人生いろいろ、バッテリいろいろ。ホビー系の二足歩行ロボットでは、主に充電式のバッテリが用いられる。中には乾電池、例えば単三電池を使用するものもある。しかし、その多くはニッカド(Ni-Cd)タイプやニッケル水素(Ni-MH)タイプの充電可能なバッテリユニットを使用している。本連載で組み立てているKHR-2HVは、ニッケル水素バッテリがセットになっている。KHR-2HV標準のニッケル水素バッテリは10.8V、300mAhという容量だ。さらにRobot Watchスペシャルセットに含まれている2本の予備バッテリも、やはりニッケル水素バッテリでこちらは10.8V、800mAhである。 ところが巷で開催されているロボット競技会では、リチウムポリマー(Li-PO)タイプのバッテリを使用している競技者をよく見かける。小型で容量が大きく、放電量に優れたリチウムポリマーバッテリは、ロボット向きと言っていい。しかし、初心者ユーザにはお勧めできない面もある。そう、扱いが難しいのである。まず何より信頼性の高い製品を選ばなくてはならないし、充電設定などを誤ると発火などの危険が強まる。保管などの管理にも、十分気を使わなくてはならない。ある程度知識がついてから、じっくり取り組むべきバッテリなのである(注:ホビーロボットの世界では、という話だが)。 さて、それでも新しいものや、ベテラン向けのものを使いたくなるのが、我が愛すべき友人である。買ってきて組み立てたばかりのKHR-2HVをこよなく愛し、先日はついにロボット競技会を見学して来たという友人。 「リポだよ、リポ! オレもバッテリをリポに変えようと思うんだ!」 気持ちはわかるが友よ、しばし待て。君は「リポ」という言葉は知っていても、それが「リチウムポリマー」の略称だということも知らなかったではないか。君は某有名ドリンクの名称を、真っ先に思い浮かべていたではないか。扱いが難しいバッテリなのだから、もう少し慣れてからにしようよ。 なお、リチウムポリマーバッテリは、信頼できるものをちゃんと使っている分にはまったく問題ない。しかし、そうでない場合の危険性が高いのも事実なので、十分注意して欲しい。個人的にはKHR-2HVの場合、ニッケル水素バッテリが一番だと思っている。 ● ニッケル水素バッテリを、充電しよう! さて、最初にバッテリの話を持ってきたのは偶然ではない。前回、サーボモーターの原点出しを行なったが、その際にKHR-2HV付属のバッテリ、あるいはオプションで購入したバッテリを使用したはずだ。使ったバッテリは充電しなければならない。そこでまず、Robot Watchスペシャルセットに含まれる充放電器、MX-301を使ってニッケル水素バッテリを充電しよう。MX-301は安全かつ高速に、さまざまなタイプのバッテリを放電、あるいは充電することができる。もちろんKHR-2HVのニッケル水素バッテリにも対応しており、自動で放電を行ない、放電が終了してから充電を行なうこともできる。実はこれが重要なことで、ニッケル水素バッテリは「使って残りを放電、それから充電」が基本なのである。こうしないと「メモリ効果」という、やっかいな現象を引き起こしてしまう可能性があるのだ(ある程度までバッテリを使い、そのまま充電した際に起こる。充電された容量をバッテリが憶えてしまい、フルに容量を使えなくなってしまう現象)。 通常、ニッケル水素バッテリは約200回の充放電が可能と言われているが、KHR-2HVのようなロボットで使用した場合、この寿命が短くなってしまうことも多い。長く安定してニッケル水素バッテリを使用するコツは、「しっかり放電、安定充電」なのである。ではMX-301を使って充放電を行なう場合の設定は、どのようにすればいいのか? 設定する項目は放電電流、放電終了電圧、そして充電電流の3つである。私の経験上の設定では不安だったので、近藤科学さんに問い合わせてみた。すると以下のような推奨設定値を提示してくれた。
ポイントとなっているのは放電、充電共に「1C」が安全、安定しているということ。「1C」というのは1セルということではなく、例えば300mAhのバッテリなら「300mA(0.3A)で1時間」充電、放電するということ。「2C」なら2倍の電流で充電、放電できるため、時間も半分で済む。なお、放電終了電圧はバッテリのセル数に、0.9Vをかけて算出されている。 バッテリの充放電時は、必ずそばにいて状況をいつでも確認できるようにすること。たまにバッテリ本体に触れて、異常な発熱が無いかをチェックしよう。もちろんMX-301の設定を間違えないように、十分注意したい。それとバッテリの残量がかなり少なくなっている場合、MX-301で充放電を行おうとすると、エラー表示されてしまう場合がある。そんな時は、充電のみを行なえばいい。 なお、上記のほかにも近藤科学さんから、バッテリを扱う上でのコツを聞いてみた。そのうちいくつかを紹介すると、例えば調子の悪いニッケル水素バッテリを充電中、電圧表示が13V後半から14Vを超えるようなら、そのバッテリは寿命だと思っていいそうだ。また、メモリ効果が発生してしまったバッテリでも、放電-充電をゆっくり繰り返すと、リフレッシュする場合があるとのこと。近藤科学のSさん、ご協力ありがとうございました。
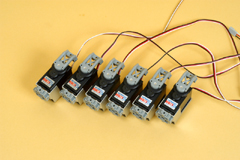
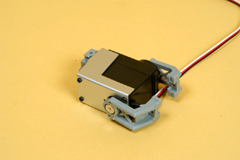
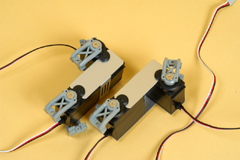
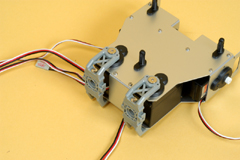
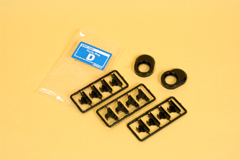
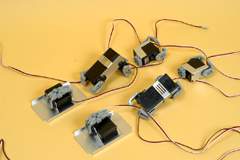
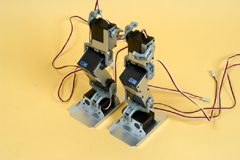
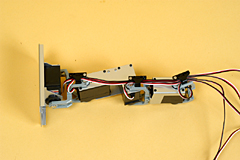
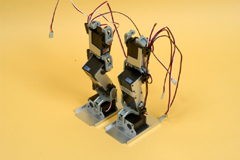
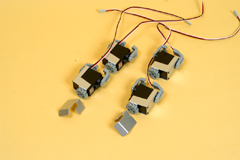
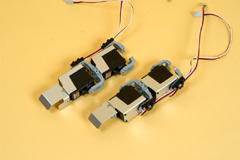
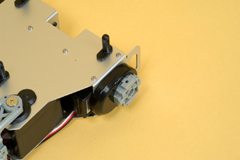
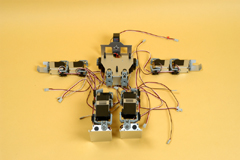
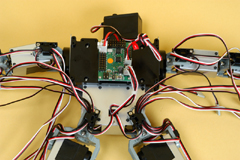
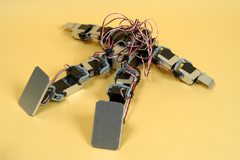
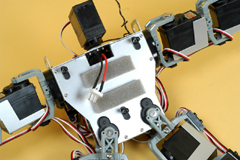
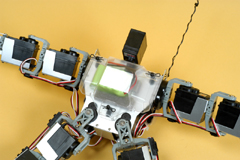
● KHR-2HV、出来たどー!(ハードウェアだけ) MX-301がバッテリをせっせと放電し、充電してくれている間に、筆者はKHR-2HVの完成を急ぐ。各サーボモーターの原点を設定しつつ、組み立てと配線作業を同時に進めるのである。というかこの段階に至ると、組み立てながら配線の具合をチェックすることになる。ちなみにここでいう「配線」とは、サーボモーターから伸びるケーブル(サーボリード)の取り回しを意味している。各サーボモーターから伸びるケーブルは、最終的にKHR-2HVが背中に背負うコントロールボードへ接続することになる。KHR-2HVは二足歩行ロボットであり、複数のサーボモーターで構成された手足を、かなりの範囲で動作させることになる。このためケーブルを一定の姿勢に合わせてピンと張ってしまうと、次の動作に移った際にケーブルに大きな負担をかけてしまうのだ(最悪断線する)。また、ケーブルの通り道を考えておかないと、ケーブルに引っ張られて動作が制限されたり、関節部分にケーブルが挟まってしまうこともある。そういった意味でも配線作業はロボットにとって、大変重要なものなのだ。 上記を踏まえて組み立て作業を行なっていくわけだが、まずはブラケットBユニット6個に、サーボアーム700Aアッパーアーム、ボトムアームを取り付ける。繰り返しになるのだが、アッパーアームは原点出しをしてから取り付ける。ボトムアームは自由に動くものなので、フラットヘッドホーン止めビスを締めすぎないように注意して欲しい。 ブラケットBユニットの次はレッグユニットの作業である。こちらも原点を出してサーボアームを取り付ける作業なのだが、膝部分のサーボモーター左右2個は、原点の設定値が異なるので注意して欲しい。レッグユニットの次はフットユニット2個、さらにボディユニットにもサーボアームを取り付ける。なお、サーボアーム700Aベースには向きがあるので、イラストと見比べて間違えないようにしたい。 さて、このサーボアームとベースの取り付けで「なかなかはまらない」と悩む人が多い。まず最初に注意して欲しいのは、決して無理をしないということだ。無理をして破損してしまっては、元も子もないからだ。ただし、ある程度の力を加えないとサーボアームとベースが、きっちりはまらないのもまた事実。サーボモーターの軸になるべく無理な力を加えないようにしながら、ギュッギュッと押し込んで行こう。マニュアルにも書いてある通り、ヘアドライヤーなどで少し暖めてあげるのもいい手である。 全てのパーツにサーボアームなどを取り付け終わったら、いよいよ最終組み立てに入る。だがその前に、ケーブルガイドというパーツをランナーから切り出して、手元に用意しておこう。腕、脚、ボディから伸びるケーブルを、このケーブルガイドで格好良く取り回して行く。なお、1つのケーブルガイドで最大5本のケーブルをまとめることができるのだが、ネジ穴のある内側に2本、外側に3本というのをあらかじめ把握しておこう。 マニュアル通りに行くなら脚(レッグ)、腕(アーム)、次にボディの準備をしてから、全てのパーツを合体という流れになる。もちろん腕と脚は左右対称、2つセットで組み立てる訳だが、この時に結構左右を間違える。何度マニュアルを見て確認しても、間違える。間違えないコツは、作業を進めていく段階で頻繁にパーツを並べて左右対称具合を確かめることだ。 また、組み立てと同時にケーブルの配線を行なうが、動作した際に突っ張らないだけの余裕を持たせることが大切だ。サーボモーターは、ゆっくりなら手で動かしても問題はない。実際に膝を曲げたり、足首を左右に曲げたりして、ケーブルに無理な力がかかっていないことを確認しつつ、作業を進めよう。 脚、腕、ボディが揃ったらロボットアニメ並みに、それらを合体させる。人型の二足歩行ロボットがほぼ組み上がる、感動の瞬間である。もし時間と心に余裕があるなら、じっくり眺めながらお茶をするもよし、記念撮影をするもよし、友人に電話をするもよし……。しかし、これで作業が終わったわけではない。コントロールユニットを背中に載せなくてはならないし、ヘッドユニットを組み立ててそれを組み付けてやらなくてはならない。 そしていよいよ、各サーボモーターとコントロールボードの接続である。チャンネルをマニュアルで確認しつつ、ピンを曲げないように慎重に接続していく。ここで重要なのはコネクタの向きだが、KHR-2HVでは原則、黒いラインがコントロールボードの外側に向くようコネクタを接続する。例外は無いので、コネクタの接続だけに関して言えば、目視で簡単にミスをチェックできる訳だ。なお、マニュアルには無いジャイロセンサーのケーブルは、コントロールボードのAD入力1、AD入力2に接続する。 配線をある程度整理し、接続状態を確認したら、次はバッテリの収まるスペースを作り出すフロントカウル、そして背中のコントロールボードを被うボードカバーの加工を行なう。KHR-2HVのパッケージには、2個のポリカーボネート製のパーツが付属している。これらのパーツは不要な部分を切り落とし、使用できる状態にする。この時、くれぐれも注意して欲しいのが“手を切らないように”ということだ。とくにカッターナイフを使っていて、刃先が滑ってしまい「ザックリ」ということもあるからだ(経験者は語る)。 切り出しのコツは、浅く溝を掘り、それをじょじょに深くする。ある程度まで深くなると、手で何度か折り曲げれば割れるように分離する。ハサミで不要な部分を切り落としてしまい、細かい部分を溝を作って折るようにすればいい。なお、パーツの厚みは場所によって異なるので、力加減が重要になってくる。焦らずゆっくり作業するのが一番だ。ちなみに刃先の尖ったデザインカッターのようなものがあれば、細部の加工が楽になる。
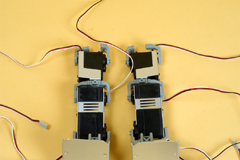
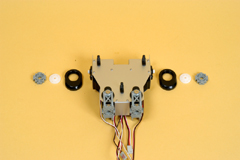
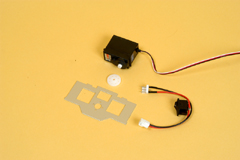
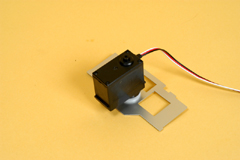
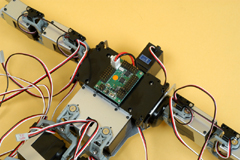
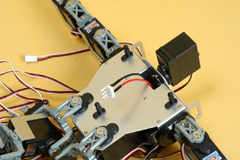
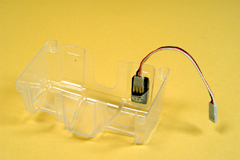
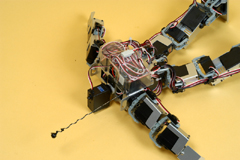
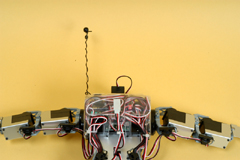
● 加速度センサーと無線コントロールユニットの受信機を内蔵する カウルの切り出しが終わったら、それらを取り付け「ハードウェア的には」KHR-2HVの完成である。おめでとう! これであなたも二足歩行ロボットのオーナーだ。もっとも初期設定を終わらせるまでは、完成したKHR-2HVが歩いたり、ダンスしたりすることは無いのだが。ここで注目して欲しいのがKHR-2HVの背中、ボードカバーの方である。KHR-2HV付属のマニュアルでは配線を整理しながら、カバーを取り付ければいい。しかし、Robot Watchスペシャルセットの場合は、このボードカバーの中に「加速度センサー」と「無線コントローラーの受信機」を内蔵しなくてはならないのだ。 まず加速度センサーだが、難しく言ってしまうと「角速度を計測するセンサー」ということになる。これをKHR-2HVでは転倒した状態の判別に使用し、起き上がるモーション(動作)と組み合わせて、倒れたときに自動で起き上がるようにする(応用的な使い方も可能なのだが)。ここでは近藤科学の「2軸加速度センサー RAS-2」を1個、使用する。 取り付け、そしてコントロールボードとの接続は極めて簡単。RAS-2の取り付けで注意する点は、向きと接続である。マニュアル通りの設定を後から行なうので、近藤科学のサイトからダウンロードしたHeart To Heart3操作説明書上級編の写真通りに、両面テープなどでしっかり固定する。また、RAS-2には2つのコネクタがあるのだが、センサー本体側のコネクタに左右を間違えないように接続する。コントロールボードの接続先は、AD入力3である。 一方、無線コントローラーの受信機は、Robot Watchスペシャルセットの「KRC-3AD 無線コントロールセット」に含まれている。コンパクトなボックス、KRR-1がそれだ。すでにKRR-1には受信機用のクリスタルが取り付けてある。このKRR-1をコントロールボードの左右、どちらかに両面テープで固定する。さらに付属のケーブルでコントロールボードの「低速シリアルポート」と接続すればいい。ちなみに無線コントロールセットに含まれている、もう1本のケーブルはKHR-2HVの場合使用しない。 加速度センサー、無線コントローラーの受信機を固定したら、配線の整理をしながらボードカバーを閉じる。なお、KHR-2HV本体パッケージに付属する、延長ケーブルをコントロールボードの高速シリアルポートへ接続するのを忘れないように。これはコントロールボードとPCを接続する高速シリアルポートが、ボードカバーを取り付けると使いにくくなるため、外部に出すためのケーブルだ。 ボードカバーを固定するためには、ケーブルをある程度整理しなくてはならない。だが、徹底的にケーブルを整理する必要もないと思っている。なぜならKHR-2HVのようなロボットはメンテナンスが必要になるし、その際にはボードカバーを開けて作業することもある。従ってケーブルの整理は、ボードカバーが無理なく固定できる程度まででいいというのが、筆者の個人的な見解である。なお、ボードカバーを固定する際には、受信機のアンテナも一緒に固定してあげよう。また、高速シリアルポートから伸ばした延長ケーブルは、ボードカバーの外側に両面テープで固定すればいい。 さあ、ここまで来たら追い込みである。フロントカウル内、バッテリの入る部分に付属のスポンジを貼り付ける。一応、バッテリを接続して(電源スイッチがオフになっていることを確認)、フロントカウルがきっちり閉まるかどうかを確認する。もしボディピンを差し込みにくいようなら、フロントカウルを少し削って調整してあげよう。 前後のカウル、そしてカバーは半透明だが、それは表面に保護用のシートが貼ってあるから。シートを残して半透明状態で使用するもよし、はがして美しい透明状態で使用するもよし。あるいはポリカーボネート用の塗料で、好みの色に塗ってもいい。ちなみにボードカバーは内部空間の広いラージタイプがオプションとして販売されているし、表面がカーボンファイバー模様になっているタイプも販売されている。このあたりは、じっくりカスタマイズしてあげるのも面白いだろう。 ここまでの作業で、間違いは無かっただろうか? 何か忘れていることは無いだろうか? マニュアルとじっくり見比べながら、もう一度確認しておこう。ハードウェアは今回で完成、組み立て完了である。いよいよ次回はKHR-2HVに命を吹き込む作業、さまざまな設定を行なう。KHR-2HV、大地に立つ! いや、テーブルに立つ日が、ついに訪れるのだ……って、1つ筆者が忘れてました。そうです、KHR-2HVの足裏をRobot Watchスペシャルセットに含まれている、バスタブソールと交換しておきましょう。このように作業工程が多いと、忘れ物も多くなるのです……(本当に忘れていました、すいません)。
「ロボットを人型にする理由? ロボットが人間の“友達”になってほしいから」 -あるロボット研究者の言葉- ■ 関連記事 ・ 高橋敏也の「KHR-2HV“超”初心者入門」 -Mission04- 「KHR-2HV、怒濤の組み立て編、パート2」(2008/11/04) 2008/11/07 23:13 - ページの先頭へ-
|