記事検索 |
バックナンバー |
【 2008/12/19 】 |
||
| ||
【 2008/12/12 】 |
||
| ||
【 2008/12/08 】 |
||
| ||
【 2008/12/01 】 |
||
| ||
【 2008/11/26 】 |
||
| ||
【 2008/11/14 】 |
||
| ||
【 2008/11/07 】 |
||
| ||
【 2008/11/04 】 |
||
| ||
【 2008/10/24 】 |
||
| ||
【 2008/10/17 】 |
||
| ||
【 2008/10/10 】 |
||
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
高橋敏也の「KHR-2HV“超”初心者入門」 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Reported by
高橋敏也
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
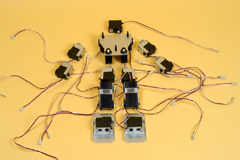
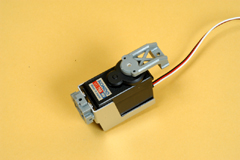
二足歩行ロボットは、基本的に人体と似たような構造をしている。腕があり、脚があり、胴体、そして頭がある。人体の関節にあたる部分がサーボモーターだと思えばいいのだが、実はここに大きな問題がある。そう、人間の関節は回転したり曲がったり、多様な方向に動くが、サーボモーターの場合は一定方向にしか動かないのである。この点がのちのち、ロボットの動きをオリジナルで作成する時に、難しい点となってくる。 それでも二足歩行ロボットは、人間によく似ている。人体で言うところの太腿や太腿、太腿が、ちゃんとKHR-2HVにも存在する。いや、別に私が太腿にこだわっている訳では無い。我が愛する友人が太腿フェチで「KHR-2HVにも太腿がちゃんとあるじゃないか!」と、大喜びしているのである。 そうですか、KHR-2HVの太腿ですか。不肖・高橋、世の中にこれほど色気のない太腿も珍しいと思いつつ、KHR-2HVの「太腿部分」を見ていたのだが、いかがなものか。ちなみにKHR-2HVの太腿部分は、別名「ブラケットBユニット」である……。 ところがさすが、我が友。どう転んでも、KHR-2HVの太腿に色気は無いという話をしていたら、きっちり断言してくれた。 「太腿と思えば、それがロボットでも“ときめく”もんだ」 立派、ご立派です。あなたのその想像力には、感動すら憶えます。ちなみに友人曰く、「カミサンも娘も私の言うことを聞いてくれないが、KHR-2HVは何でも言うことを聞いてくれるから可愛い」のだそうだ。何かこう、君の家庭には根本的な問題があるように思えるのだが、どうしたもんだろう? まあ、愛機となったKHR-2HVと幸せに暮らしてください。 ● そろそろサーボモーターにマーキングした方がいいかも
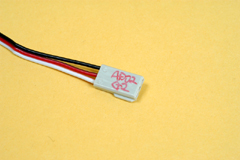
ちなみにここで、組み立て時のネジの扱いに関して、もう一度復習しておこう。 ●締めすぎは禁物、とくにサーボモーターのケースビス ●全てのネジを軽く締めてから、最後に対角線を意識しながら締めこむ ●マニュアルと見比べて、ネジを間違えないようにする KHR-2HVを組み立てるには、大量のネジを扱わなくてはならない。最初は慎重にネジを扱っていても、だんだん作業が雑になるのが人間の困ったところである。ネジの締め具合1つで、KHR-2HVの仕上がりに違いが出るのもまた事実。最後まで気を抜かないで、ネジを締め続けよう。 それともう1つ、今回は組み立て作業が本格的に進むので、そろそろ「サーボモーターのナンバリング」をしておいた方がいいかも知れない。サーボモーターはコントロールボードの任意の「チャンネル」へ接続し、動作を制御する。例えばKHR-2HVの頭になるサーボモーターは「CH1」、すなわち「チャンネル1」へ接続するのである。このチャンネルを分かりやすくするため、KHR-2HVにはサーボモーターから伸びるケーブル、すなわちサーボリード用のシールと、サーボモーター自体に貼るシールが用意されている。これをサーボモーターとそのケーブルに貼っておけば、間違いなどを防ぐことができるという訳だ。 もちろんマニュアルと見比べながら、間違えないように作業すればシールは不要である。シールを貼る、貼らないは個人の自由だが、後で剥がすこともできるのだから、間違いを防ぐ意味でも貼ることをお奨めしたい。
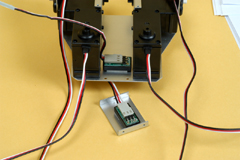
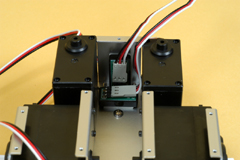
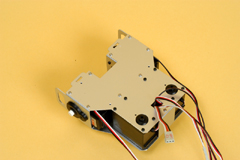
● ジャイロセンサーの取り付け 前回、組み立て作業はフロントフレームまで進んだ。そして「マニュアルとは違う作業を入れる」と書いたのだが、それは「ジャイロセンサーの組み込み」である。ジャイロセンサーはKHR-2HVのパッケージには含まれていない、オプションパーツである。しかし本連載で取り上げている「Robot Watch スペシャルセット」には、ジャイロセンサー2つと、加速度センサー1つ、計3つのセンサーが含まれているのだ。そしてジャイロセンサーは、KHR-2HVのボディの中に組み込んでしまう。このためフロントフレームの組み立ててで、通常のマニュアルに沿った作業を止めた訳だ。では、ジャイロセンサーの組み込みに関するマニュアルは、どこにあるのだろうか? 必要になるのは「RCB-3J操作説明書上級編」で、これはメーカーである近藤科学のWebサイトからダウンロードすることができる。「RCB-3J 操作説明書・上級編 KHR2HVSP1.EXE」を任意の場所にダウンロードし、実行して生成される「KHR-2HV SP1」フォルダの中に、上級編マニュアルのPDFファイルが含まれている。 この上級編マニュアルに、ジャイロセンサーの取り付け方法と設定方法が記載されている。ジャイロセンサーとは何か? どのような効果があるのか? 詳細に関しては設定する際に解説するので、今はとにかくジャイロセンサーを取り付けて欲しい。取り付け方向を間違えないように、強力タイプの両面テープなどを使って固定すればいい。 なお、ジャイロセンサーにはボディ前後の傾きを感知する「ピッチ用」、ボディ左右の傾きを感知する「ロール用」がある。ピッチ用はコントロールボードのアナログ入力ポート「AD1」に接続し、ロール用は「AD2」に接続する。ボディに内蔵されてしまうと、判別が難しくなるので、ジャイロセンサーから伸びるケーブルのコネクタに、目印を書いておくといいだろう。 ジャイロセンサーを組み込んだら、サーボリードの取り回しに注意しながら、ボディユニットを組み立てる。さらにコントロールユニットも組み立て、次の作業に進む。
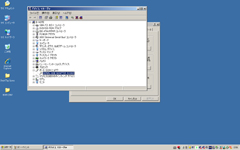
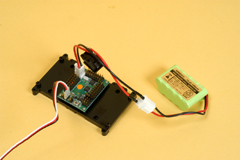
● サーボモーターの原点出しは、重要な作業 コントロールユニットを組み立てたということは、何かしらその出番があるんじゃないか……。そう思ったあなたは勘が鋭い。この先、組み立てを進めるためには「サーボモーターの原点設定(原点出し)」をしなくてはならない。そしてこの作業を行なうのに、コントロールボードが必要になってくるのだ。ではサーボモーターの原点設定とは何か? そもそもサーボモーターは、軸をコントロールしながら回転させるパーツである。例えばコントロールボードはサーボモーターに「100、右に回転せよ」と指令を送る。ちなみにここで言う「100」は角度でも、割合でもない。任意の数値だと考えて欲しい。指令を受けたサーボモーターは「右に100」回転する訳だが、問題は「その時の基準はどこにあるか?」ということだ。そう、原点を設定しないと、スタート地点が分からないのである。 原点出しをするには、コントロールボードとサーボモーターを接続しなくてはならない。さらにコントロールボードにはバッテリ、そしてPCを接続する。コントロールボードとPCの接続には、付属のシリアルUSBアダプタとシリアル延長ケーブルを使用する。まずはPCのUSBポートにシリアルUSBアダプタを接続し、付属のメディアからドライバソフトをセットアップする。さらに付属メディアからモーション作成ソフトウェア「Heart To Heart3」をPCの任意の場所にコピーし(「KHR-2HV」というフォルダを丸ごとコピーすればいい)、Heart To Heart3を起動する。 この時、重要なのがセットアップして利用できる状態になったシリアルUSBアダプタが、「何番のCOMポートを使用しているか?」だ。使用しているCOMポートの番号は、「デバイスマネージャ」で調べることができる。起動したHeart To Heart3でこのCOMポートを指定し、さらに「SYNC(シンクロスイッチ)」にチェックを入れる。このスイッチをチェックすると、Heart To Heart3の操作でリアルタイムにサーボモーターを動作させることができる。
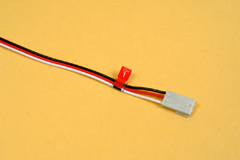
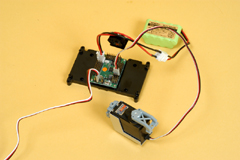
コントロールボード、コントロールユニットの方は、あらかじめ充電してあったバッテリを接続する。電源スイッチは切った状態にしておき、ボードの「高速シリアルポート」に、シリアルUSBアダプタから伸びるケーブルを接続する。なお、ボードの電源がオンになっていると、緑色のLEDが光っているので容易に判別できる。また、ケーブルを高速シリアルポートに接続する際には「黒いライン」が、ボードの外側に向かうようにする。高速シリアルポートは、ほかのポートと同じ形状なので、場所を間違えないように十分注意して欲しい。 あとは原点を設定したサーボモーターを、コントロールボードの「CH1」、すなわちチャンネル1に接続する。この際、やはりサーボリードは黒いラインが外側に向くよう接続する。これを間違えるとケーブルが焼けたり、最悪の場合は基板が破損してしまうので十分注意する。 サーボモーターを接続したら、コントロールボードの電源を入れ、さらにPC上のHeart To Heart3を操作する。「ポジション設定」の「POS」ボタンを選んで、データシート上でクリック、表示された「POS1」をダブルクリックする。表示されたウィンドウのCH1を、「SERVO」に設定する。するとサーボモーターの軸が少し回転したり、あるいはサーボモーターから「チリチリ」という動作している音が聞こえるはずだ(音はしない場合もある。原点が最初からほぼ出ている場合は、動きもしないし、音もほとんど聞こえない)。 ここで試しに、CH1のスライドバーを左右に動かしてみよう。するとサーボモーターの軸が、バーの移動に合わせて回転するはずだ。この動きを元に、ロボットが動作するのである。もちろんここでは原点を設定するので、スライドバーを中立、バーの左に表示されている数値が「0」になるようにする。その状態でサーボホーン(円盤状のパーツ)や、アッパーアームを取り付ける。取り付ける際には出来る限り、サーボモーターとの平行を出す(ネジの締め付けなどは後で行なう)。原点の設定が終わったら、コントロールボードの電源を切って、サーボモーターを取り外す。
● せっせ、せっせと原点設定 ここからはそれぞれのサーボモーターに、原点を設定しつつ、組み立て作業を行なう。ちなみにそれぞれのサーボモーターを、決まったチャンネルに接続する必要はない。CH1を使い回して、原点を設定してやればいい。また、原点が「0」以外になるのは、CH13とCH19になるサーボモーターのみ。具体的にはレッグユニットの「膝」にあたるサーボモーター2個だ。CH13が「-90」、CH19が「90」となるのだが、もちろんこの原点出しもコントロールボードのCH1に接続して行なえばいい。膝以外のサーボモーターは全て「0」設定である。そうなると膝以外の設定を、一気にやってしまいたくなるのだが、それは混乱の元になってしまうことが多い。やはり組み立てを進めつつ、小まめに原点出しをした方がいい。なお、組み立ての最終段階、アッパーアームなどの固定作業は次回、じっくり行なう。というかそろそろ、KHR-2HVの組み立てを終わらせて、完成させたいのだけど……。いずれにしても、あとひと頑張り! 気を抜かないで行こう!
「立ったぞ、高橋! オレのKHR-2HVが立ったぞ!」 -KHR-2HVを組み立てた友人が午前3時に、熟睡中の筆者にかけてきた電話- ■ 関連記事 ・ 高橋敏也の「KHR-2HV“超”初心者入門」 -Mission03- 「KHR-2HV、怒濤の組み立て編、パート1」(2008/10/24) 2008/11/04 18:39 - ページの先頭へ-
|