記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
「実用化間近! レスキューロボット最前線」 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2月5日(木)~20日(金)に大阪産業創造館において、ロボット・フェスタ2009が開催され、ロボットを展示するロボットショールームやロボットテクノロジー展が実施された。 本稿では、当期間中に開催された、「今年のロボット」大賞2008の受賞者講演会の中からNPO法人国際レスキューシステム研究機構 会長の田所諭氏による講演「実用開発間近! レスキューロボット最前線」についてレポートする。 田所氏は、1995年の阪神淡路大震災を経験したことがきっかけで、ロボットテクノロジー(RT)をレスキューロボットに活用する研究を始めた。実用化がリアルに感じられるようになったレスキューロボットの最新技術について紹介した。
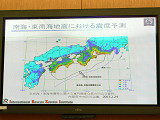
● レスキューロボット研究事始め 田所氏は、「レスキューロボットに関する研究は、世界的に見ても歴史が浅い」という。日本で本格的にレスキューロボットの研究が始まったのは、阪神淡路大震災以降であるし、アメリカもほぼ同時期となるそうだ。震災当時、神戸に在住していた田所氏は、自身が長年研究してきたロボットやアクチュエータ技術が災害現場で全く役に立っていないことにショックを受けたという。そこでレスキュー活動に対してRTがどのように研究されているのか調べたところ、誰も手をつけていないことを知り愕然としたそうだ。「このまま研究せずにいたら、20年後も100年後もレスキューの役に立つロボットは現れない」という思いに駆られ、レスキューロボットの研究を始めた。 当時は、周囲の理解を得ることにも苦労があったという。しかし田所氏は、「関東大震災以降に土木工学や建築学が発達し、1976年に建築基準法が改正されて以降の建物は震災にも耐えた。ロボットテクノロジー(RT)もそれと同様に、防災・救助の役に立つ場面が数多くある」と、述べてきたそうだ。 2002年に中央防災会議が発表した「今後の防災のあり方」というレポートには、重点課題の1つに先端技術の活用があげられた。防災情報システムや情報伝達、危険地域での活用等にロボットが有効ではないかと期待されている。具体的には、災害の概観や環境、危険物質等の情報収集、要救助者の探索や状態を調べること、被害の定量的調査、復旧活動支援等さまざまな局面でRTの活用が考えられた。 そこで、先端的な救助・災害対応システムを研究開発し普及することを目的に掲げ、田所氏が会長となり「NPO法人国際レスキューシステム研究機構(IRS:International Rescue System Institute)」を2002年に設立した。この年に、「大都市大震災軽減化特別プロジェクト(大大特)」がスタートし、その成果物である「能動スコープカメラ」が、「今年のロボット大賞」2008 優秀賞を受賞した。大大特は2006年に終了したが、消防庁の消防防災科学技術推進制度やNEDOの戦略的先端ロボット要素技術開発、次世代ロボット知能化技術開発プロジェクトなどに引き継がれて研究を続けている。
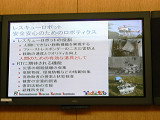
● 狭所探査用ロボット「能動スコープカメラ」とは 田所氏が救助活動プロセスを詳細に調査した結果、一番時間が掛かっているのは情報収集であることが分かったという。消防隊の方々からも「被災者の居場所さえ分かれば、助け出す手段はある。しかし、どこにいるのかが分からなければ手の打ちようがない」という切実な声があったそうだ。そこで大大特では、研究のフォーカスを情報収集においた。救助の道具として高度救助資機材の研究開発、概観情報の収集と情報収集のためのインフラ機器開発、ロボットや情報機器から集めたデータを統合する共通プロトコル・データベースの構築などを行ない、これらの実証実験や訓練、デモンストレーションに積極的に取り組んできた。狭所探査用ロボット「能動スコープカメラ」は、瓦礫内での情報収集を行なう高度救助資機材にあたる。 この能動スコープカメラは、ファイバースコープの周りに特殊なアクチュエーターがあり、表皮全体が駆動力を持っている。動画のようにケーブルがずるずると動き、段差を乗り越え周囲を見回して要救助者を捜す。通常のファイバースコープでは、ガレキ等の中にケーブルを押し込むことしかできないため、探索範囲が1m程度に限られてしまう。しかし能動スコープカメラの場合、ケーブル自体が走行機能を持っているため、これまで入ることができなかった奥深くまで侵入し、情報収集できるメリットがある。 また、ガレキ内の壁に沿って進行した場合、ケーブルをねじることで進行方向を操縦できる。障害物を回避したり、高さ20cmくらいなら乗り越えたり、また20度の傾斜も登ることができる。
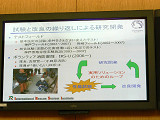
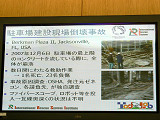
IRSでは、能動スコープカメラを実用に耐えるものとするために、性能試験と改良の繰り返しを重視した。そのためにはテストフィールドが必要となるため、神戸のポートアイランドにあるIRSのラボの近くに倒壊家屋実験施設を作り、消防隊の有志ボランティアにロボットを実際に使っていただき具体的な意見やアドバイスを受けながら開発をしてきた。 これが国内外で高く評価され、自治体消防制度60周年記念「消防防災ロボット・高度な資機材等の研究開発、実用事例」で最優秀賞を受賞し、また「今年のロボット」2008最優秀賞受賞に繋がった。 海外でのテストは、2007年6月にアメリカ最大の都市型災害訓練所で実施した。これはアメリカの国立標準技術研究所(NIST:National Institute of Standards and Technology)が、レスキューロボットの評価を標準化しようと、ロボットの試験のメソッドを作ろうとしたものだ。そのために、全世界から30台のロボットを集め評価試験をやり、連邦緊急事態管理庁(FEMA:Federal Emergency Management Agency)の隊員による評価メソッドを試みた。この時に能動スコープカメラは、最も使える技術として評価されたという。 またこのテストの後に、フロリダ州で建設中のマンション群の駐車場が崩壊するという事故が起きた。その事故後の原因調査が実施された時、上記テストに参加していた隊員から能動スコープカメラに出動要請が入ったそうだ。 通常、こうした現場では重機を使ってガレキを取り除いて、内部の状態を調べることになる。しかしそれをしてしまうと、ガレキや構造物に入っているクラックが崩壊の際にできたものなのか、重機によってできたものなのか判断がつかなくなる。その点、能動スコープカメラなら、周囲に影響を及ぼすことなく奥深くまで監視できるため最適だと期待されたわけだ。 結果として、能動スコープカメラは、ガレキの中を7m地点まで入り込み映像を得ることができたという。コンクリートの亀裂の形状・方向、薄利片の断面などは、専門家が見れば応力がかかった方向や薄利の原因が一目瞭然となる。貴重なデータを収集でき、非常に喜んでもらえたそうだ。アメリカのレスキュー隊の第一人者からも「こうした現場で使えるということは、すなわち救助の場面でも有効に使えるということだ」とお墨付きをいただいたという。 もちろん、実際に資機材として配備されるためには、まだ課題がある。運動性能も操作性もアップする必要があるし、視野角も不足している。また、記録機能も追加する必要があるだろう。ロボットを有効活用するためには、操縦法のマニュアルや訓練も必要となる。そうした積み重ねの中で、どの場面なら能動スコープカメラが活用できるか、判断できるようにならなければいけないと、田所氏は語った。
● 2015年頃の実用化を目指す 「閉鎖空間内高速走行探査群ロボット」
もちろん自律ロボットでここまでできるようになるのは、「夢のまた夢」であり、今は、現実的な遠隔操縦技術の研究をしている。遠隔操縦により人間の能力とロボットの能力を融合させて、何ができるのかを探るのが防災の問題を解くべき鍵となるという。 田所氏は現在開発中の研究として、NEDOの「戦略的先端ロボット要素技術開発プロジェクト」のステージゲート(絞り込み評価)を通過した被災建造物内移動RTシステム「閉鎖空間内高速走行探査群ロボット」について紹介した。
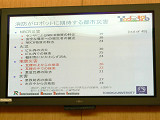
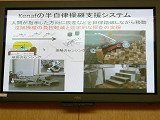
同プロジェクトでは、主にNBCテロやガス漏れなどの災害現場のような危険な場所で、ファーストレスポンダー用の高度救助資機材として活用するのを想定した研究開発をしている。ロボットは狭く危険な現場でも活動できる利点がある。しかし平地以外での運動性能はまだまだ不足しており、ロボットが人間や犬のようには動くことができない。 そこで、クローラー型レスキューロボット「Kenaf」を開発し、さまざまな性能実験を行なっている。「Kenaf」はロボカップ2007アトランタ世界大会に出場し、運動性能競技で優勝している。また、2008年11月には米国「Disaster City」でもテストをし、高い評価を得た。ここでは、アメリカのありとあらゆるロボットを同じ条件でテストしているが、その中で「Kenaf」は他のロボットがクリアできない不整地を走破し現地スタッフを驚かせたという。 しかしながら、「このような高度な移動が可能なのは、ロボットを目視で操縦しているからだ」と田所氏はいう。本来のレスキュー現場では、ロボットはオペレータから見えないところで移動しなくてはならない。人間がロボットの周囲の状況を認知できない状態で、的確な操縦を行なうのは非常に難しい。そのための解決手段として、人間の操縦スキルをロボットに埋め込み、不整地の凹凸を自律的に判断して移動する技術を研究している。 また、遠隔操縦をするためにはオペレータがロボットの操縦を練習する必要がある。そのためにシミュレータを開発し、仮想世界の中で試験が可能とした。 その他にも、複数台のロボットを1人のオペレータが操縦する技術、地下街を走るロボットが避難する人を避けて進む技術、無線通信が通りにくい地下街において迅速にネットワークを構築する技術等、レスキューロボットの実用化に向けて、さまざまなアプローチで研究開発を行なっているという。
阪神大震災から14年が経過し、問題点が残っているものの研究開発成果の一部は実用レベルに達してきた。今後は、実際にユーザーに使ってもらい評価を受けながら、実用化に向けた研究を続けていくことが重要な段階にはいったという。そのためにもメーカーによる製品化が必要で、NEDOからも「Kenaf」を受注可能にするよう指示が出されているそうだ。 講演の中で、「大事なことはロボットを作ることではなく、災害救助の目的に沿う何らかの機材を作るということだ」と田所氏は何度も強調した。田所氏は消防の方々に、「アメリカが世界の警察ならば、日本は世界の消防になるべきだ」と伝えているという。そのために、レスキューロボットシステムの実用化を目指していると、講演を締めくくった。 ■URL NPO法人国際レスキューシステム研究機構(IRS) http://www.rescuesystem.org 今年のロボット大賞 http://www.robotaward.jp/ ロボットラボラトリー http://www.robo-labo.jp/ NEDO http://www.nedo.go.jp/ 戦略的先端ロボット要素技術開発プロジェクト http://www.nedo.go.jp/activities/portal/p06023.html ■ 関連記事 ・ 「ロボットの実用化に欠かせない触覚センサー技術」 ~「今年のロボット」大賞2008 受賞者講演会【2】(2009/03/31) ・ 「タカラトミーが考える、おもちゃとテクノロジーの融合が生み出すもの」 ~「今年のロボット」大賞2008 受賞者講演会【1】(2009/03/11) ・ NEDO、2015年頃の実用化を目指す6種のロボットを発表 ~「戦略的先端ロボット要素技術開発プロジェクト」ステージゲート結果発表(2009/02/16) ・ ロボラボ、「ロボットショールーム」を期間限定オープン ~全国から招致した29体のロボットを一堂に展示(2009/02/09) ・ NBC災害で活躍するレスキューロボットたち ~救助支援活動のデモも(2007/10/12)
( 三月兎 )
- ページの先頭へ-
|