記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
NEDO、自動運転車による隊列走行など「エネルギーITS推進事業」の概要を発表 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
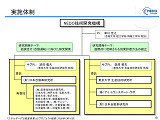
1月16日(金)、NEDO技術開発機構は省エネ効果の高いITS(Intelligent Transport Systems、高度道路交通システム)の実用化推進のため2008年度から開始した「エネルギーITS推進事業」の概要について記者発表会を開催した。自動運転・隊列走行を可能にして省エネ走行の実現を目指し、また同時に国際的にも信頼されるCO2削減効果評価の確立を目指す。
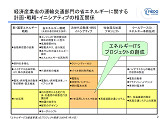
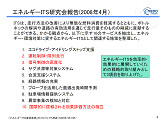
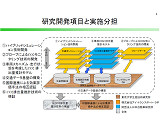
ITを使うことで無駄な燃料消費を削減し、渋滞などを解消することを目指す「エネルギーITS」では、10の研究目標が抽出されている。公募の結果、今回は協調走行(自動運転)に向けた研究開発と、国際的に信頼される評価基準を目指したシミュレーションのフレームワーク開発を目指す。2008年度の事業規模は、8億800万円。2012年度までの5カ年計画で、2012年度には電子式隊列走行の実証実験の完了を目指す。なお「信号制御の高度化」という研究目標もあり、公募をしたが応募はなかったという。
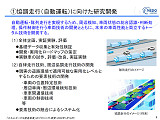
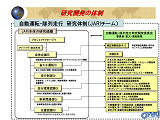
● 協調走行・自動運転の技術開発
これまでの自動運転に関する研究は、道路側のインフラを利用するものが多かった。だが今回は車の自律走行技術で走行することを目指す。そのために自動車にはGPS、カメラ、レーザーレンジファインダーやミリ波レーダーなど、各種センサー類を搭載。目標車線にしたがって走行する技術、省エネのための自動速度制御技術、そして一般道を対象としているので、高度な障害物回避技術などを開発する。
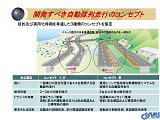
自動隊列走行については、目的および実用化時期を考慮した3種類のコンセプトを策定。コンセプト1・2は一般車との混合交通で省エネを実現することを目指す。いっぽうコンセプト3は専用レーンを使い、高効率な幹線物流システムの実現を目指す。隊列形態も3台以上とし、先頭車のみドライバーが乗車するなど、高度な自動走行制御技術が要求されるものとなっている。それぞれのコンセプトにおいて、ドライバーとシステムの機能分担が非常に重要となるという。 今回開発される自動運転車両は、道路側のインフラにあまり頼らないことを目指している。まるで屋外環境で動作する自律移動ロボットのようなものだ。要素技術としては、 1)燃費の良いルート案内、隊列走行による空気抵抗低減を行なう省エネ運転制御技術 2)高精度GPSと3次元道路地図を使った自律走行制御技術 3)各種境界、構造物を認識する走行環境認識技術 4)慣性計測装置、GPS、カメラ、レーザースキャナ、オドメトリなどから作成する3次元デジタル地図と認識技術、高精度GPSを使った高精度の自己位置認識技術 5)隊列走行用の車車間通信技術 などを研究開発していくことになる。
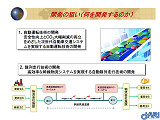
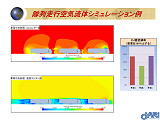
記者会見では、コンセプト2の隊列走行システムの基本構成や、自動運転隊列シミュレーターを使ったコンピュータシミュレーションの結果が示された。全長12mで25tクラスの大型トラックを車間距離4m、時速80km/hで走行させたときの圧力分布と流速分布を調べ、Cd値(空気抵抗係数)低減率を見ると、先頭車、最後尾車とも、低下していることが分かった。これは燃費がよくなることを意味し、特に真ん中の車両ではCd値は半分になっており、3台平均すると15%程度の削減が可能になるという。 他の自動運転システムとの技術比較の図表も示されたが、それを見る限り、今回開発を目指す技術は、DARPAアーバンチャレンジで勝利した車両の構成にもっとも近いようだ。実験は新東名高速道路で行なう予定だという。
● 国際的にも信頼されるCO2削減効果評価の確立
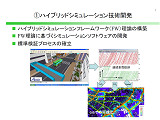
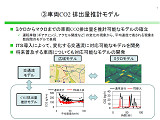
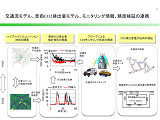
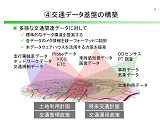
開発する技術要素は大きく分けて6項目挙げられる。 1)ハイブリッドシミュレーション 2)車両CO2排出量推計モデル 3)プローブによるCO2モニタリング 4)交通データ基盤の構築 5)国際連携 6)CO2排出量推計技術の検証 この6項目が、国際的な標準とすることを目指す。ミクロからマクロまでシミュレーションを行ない、車両や道路の状態をシミュレーションしてから統合して推計する技術を開発する。また、さまざまな既存の交通関連データがあるが、そこに標準的なデータ構造を提案する。具体的なデータ構造についてはまだ検討中とのことだ。
■URL NEDO技術開発機構 http://www.nedo.go.jp/index.html 自動運転・隊列走行の研究開発を開始-ITを活用した「世界一やさしいクルマ社会」を目指して- http://app3.infoc.nedo.go.jp/informations/koubo/kaiken/BE/nedopressorder.2009-01-16.4721301763/ ■ 関連記事 ・ ZMP、カーロボティクス分野で首都大学東京との共同研究を開始(2008/12/19) ・ 日産の考える「ロボット化するクルマと都市」の未来 ~クルマと人との「豊かな関係」とは(2008/12/15) ・ 「Automotive Technology International 2008」レポート ~着実に進む自動車のロボット化を見られる展示会(2008/08/01) ・ クルマは最終的にロボット化する ~トヨタ技監・渡邉浩之氏によるロボットビジネス推進協議会特別講演レポート(2008/02/21) ・ Urban Challenge現地レポート 米国の無人ロボット車レース-優勝はカーネギー・メロン大学(2007/11/08)
( 森山和道 )
- ページの先頭へ-
|