記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
「2008 KYOSHO アスレチクス ヒューマノイドカップ」初日レポート |
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
MANOIによる陸上競技大会「2008 KYOSHO アスレチクス ヒューマノイドカップ」が12月6日(土)~7日(日)の日程で開催された。会場はお台場のメガウェブ トヨタ ユニバーサルデザイン ショウケース(UDS)。今年で3回目となるこの大会は、MANOIユーザーにとってはもはや年末の風物詩である。 徒競走の「アスリート種目」とフリーデモンストレーションの「パフォーマンス種目」があり、初日にはアスリート種目の中の自律クラスが行なわれた(もう一方の無線クラスは2日目)。本レポートではこの自律クラスの模様と、同日に実施されたプレス関係者らによるエキシビション競技の結果をお伝えしたい。
● 自律5mクラス MANOIは京商が発売している二足歩行ロボットキットである。パフォーマンス向けの「PF01」と運動性能を追求した「AT01」の2タイプがあるが、“世界記録”を更新したPF01ベースの機体もあり、最近ではどちらが速いかは一概には言えなくなっている。本来、このMANOIは無線による操縦が基本なのだが、近藤科学のマイコンボード「KCB-1」などを使うことで、自律ロボットに仕立てることも可能。モーションの制御は今まで通り「RCB-3」で行ない、アルゴリズム部分のみをKCB-1に実装するようにすれば、比較的簡単に自律ロボットを作ることができる。 タイムトライアルなので、MANOIの走行性能が良いに越したことはないが、それだけでは勝てないのが自律クラス。どのようなセンサーを使って、どのようなシステムにするかが重要なのだ。 5m走には4体のロボットが出場したが、その中でも特に面白かったのが上西泰輝氏の「ATACO」。上西氏はコチラの記事でも紹介しているように、今年になって頭角を現してきたビルダーなのだが、センサーとして使っていたのはなんとWiiリモコン。 Wiiリモコンは赤外線カメラとして使われており、ゴールを向くようにしてスタート地点に設置する。ATACOの両耳の部分には赤外線LEDが取り付けられており、画面の左側に寄ったら右側に行くように制御して、ロボットをゴールまで誘導する仕組みだ。こういった制御にはPCが使われており、WiiリモコンとはBluetooth、ATACOとはZigBeeで通信しているそうだ。
予選2回目までは安定しなかったのだが、本来、9秒台で走る力がある機体だけに、うまくいった3回目で10秒45の世界新記録を樹立(それまでの記録はクォータニオンの13秒14)。会場の照明などにもセンサーが反応していたということで、読み取る間隔を長くしたのが功を奏した。このように、現場で問題を把握して、それを解決する能力も問われるのが自律クラスの面白さといえる。
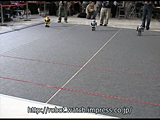
ATACOは決勝レースでも15秒01のベストタイムを出して優勝したが、決勝3回のうち2回はリタイアとなっており、安定度の面ではまだ課題も見られた。とはいえ、今回のATACOの記録は無線クラスの世界記録にもかなり近く、今後、この記録を破るロボットが出るかどうかに注目が集まるだろう。 ■自律5mクラス結果(決勝) 1位 ATACO 15秒01 2位 磯工ウォーカー 23秒11 3位 ega-001 2m40cm ● 自律10m/20mクラス 10m走と20m走には、神奈川工科大学の「クォータニオン with LPS」と磯子工業高等学校の「磯工ウォーカー」が出場。本格的な自律といえるのは、この2種目からになるだろう。というのも、5m走はスタートからゴールまでが直線になっており、極端な話、偶然ゴールしてしまうこともあり得る。ただ10m走と20m走は途中にターンがあり、真っ直ぐ走るだけでなくて、折り返し地点をきちんと認識して曲がる必要が出てくる。
両種目とも、優勝したのは磯工ウォーカー。このロボットは、頭部に超音波センサーが付いており、発信源に向かって進むようにできている。誘導するのは、超音波発信器を持った人間だ。「自律」と言っていいか微妙なところではあるが、高校の教育の一環として行なっているため、あまり難しくならないようにしたそうだ。ただ次回は、完全な自律に挑戦したいとのこと。
一方、自律10mでは世界記録を持っていたクォータニオン with LPSだが、今回はシステムを大幅に変えて出場。フィールドの四隅に赤外線のマーカーを置くのは従来と同じだが、以前はマーカー側が送信機でロボット側が受信機だったのに対し、今回はロボット側に8方向の送信機を付け、マーカーが受信機となった。これで現在位置を特定して、方向の検出には地磁気センサーも併用している。 従来のシステムだと、各マーカーが順番に送信する必要があるため、センシングに時間がかかっていたが、新システムだと各マーカーが同時に受信できるので、待ち時間が不要になる。しかし、今回はこれがうまく機能せず、残念ながら最後まで完走することはできなかった。研究室では問題なく動作していたということで、同大学の兵頭和人先生も頭を捻っていた。
■自律10mクラス結果(決勝) 1位 磯工ウォーカー 1分22秒54 2位 クォータニオン with LPS 4m50cm ■自律20mクラス結果(決勝) 1位 磯工ウォーカー 3分03秒32 2位 クォータニオン with LPS 4m90cm ● エキシビション競技 前回はプレス対抗戦だったが、今回はメディアだけでなくて、学校関係者も招いての開催となった。出場は全部で9チーム。無線の5m走×2回と、パフォーマンスの合計点で順位が争われる。5m走は2回それぞれが得点になるので、一発狙いではなく、安定して上位に入ることが求められる。弊誌からは、ライターの石井英男氏が代表として出場しており、5m走1回目が24秒70で3位、2回目が16秒42で1位。パフォーマンスでも、北京オリンピックにちなんだフェンシングとソフトボールのモーションを披露して会場を沸かせ、総合優勝を果たした。ちなみに、Robot Watchチームはこれで2連覇。
■URL 京商 http://www.kyosho.com/jpn/ KYOSHOアスレチクスヒューマノイドカップ http://www.kyosho.com/jpn/products/robot/cup/cup.html ■ 関連記事 ・ 「2008KYOSHOアスレチクスヒューマノイドCUP公式記録会」レポート ~大阪・日本橋にMANOIオーナー集結!(2008/09/17) ・ 「2008 KYOSHO アスレチクスヒューマノイドカップ 公式記録会」第2戦が開催 ~レコードタイムの更新が続出!(2008/06/17) ・ 第2回KYOSHOアスレチクスヒューマノイドカップ開催 ~第8回KONDO CUPオープンクラスも同時開催(2007/12/21)
( 大塚 実 )
- ページの先頭へ-
|