記事検索 |
最新ニュース |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
宇宙はまだまだ遠い…… |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
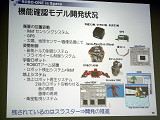
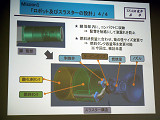
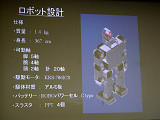
第3回となる今回の大会では、宇宙デブリ(宇宙ゴミ)掃除ロボットシュミレーションが競技項目として選ばれ、シミュレーションと、実機でのジャンプ競技会が行なわれた。また同時に「ROBO-ONE」1kg以下級大会(バトル)も行なわれた。 「ROBO-ONE on PC/Sat.3rd」のMissionは3つに分かれている。Mission1は「ロボット及びスラスターの設計」。ロボットの規格は重量1.5kg以下、サイズは200×200×100mm(幅×奥行き×高さ)以下とされている。スラスターは「他の軌道上に存在するデブリに1年以内に移動できること」とされている。「他の軌道」とはどういうことかというと、ROBO-ONE衛星が地表から450kmの極軌道を周回しているとし、デブリは440kmの極軌道を周回しているとされているため。シミュレーションは、同時に北極点上空を同方向に通過した後から移動を開始することとして行なわれる。ロボット設計にはオートデスク株式会社のInventorを使用する。 Mission2は、「デブリまでの移動、捕獲、回収シミュレーション」。繰り返しになるが、ROBO-ONE衛星は450kmの極軌道を周回、デブリは440kmの極軌道を周回しているとされる。両者が同時に北極点上空を通過した後から、ロボット単独で移動を開始し、デブリに近づき、捕獲し、衛星に回収、またはデブリを減速し大気圏にて消滅させることをシミュレーションで実行する。デブリの質量は3kg、サイズは100×100×100mm(同)の立方体とされている。Mission1で設計したデータをもとにMatlab、Simulink、SimMechanicsで簡易モデルを作成し、シミュレーションを行なう。 Mission3は「ロボット製作と遠隔操縦による実験」。宇宙デブリ回収を実機で実験するわけにはいかないので、今回はROBO-ONEの「1/4リング上、高さ1mにある飛び込み台から、足裏以外を台に着けずに前進で飛び降り、両足で着地する」という競技が設定された。飛び降り後に足裏以外が飛び降り台に触れても構わないが、着地時に足裏以外が1/4リングに触れてはならない。ロボットの操縦は、カメラ越しの遠隔操縦で行なうものとされ、カメラは外部に設置するか、ロボットに搭載する。また、ロボットの動きをコンピュータ上で再現する。データ集録・解析には日本ナショナルインスツルメンツ株式会社のLabVIEWを使用する。ロボットは、Mission1、Mission2でシミュレーションしたものと異なっていても構わないとされている。 優勝賞金は50万円、準優勝は10万円、第三位は5万円。Mission3を3回連続成功すると、宇宙大会出場が決定する。参加者には協力各社からInventor、MATLAB、Simulink、SimMechanics、LabVIEW、ロボットシミュレータと各種ソフトウェアのライセンスが配布される。 13チームがエントリーし、報告書を提出したのは4チーム。実際に発表を行なったのは「龍準」「カッチ」「ナベ☆ケン」の3チームだけだった。そして「ナベ☆ケン」が優勝、「カッチ」が準優勝、「龍準」が3位となってそれぞれ規定の賞金を獲得した。発表者が少なかったため急遽、併催が決まった「ROBO-ONE」1kg以下級大会には、7台が出場した。順にレポートする。
● 「ROBO-ONE宇宙大会」と「ROBO-ONE on PC」の関係
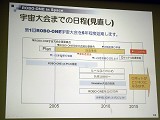
シミュレーション上で作ったプログラムをそのまま実機に持っていくことができれば、開発スピードを上げていける。いまは実験時のデータを取るためにLabviewも大会では使われている。西村氏は「シミュレーションで検討を進めることで、ロボットの信頼性も上げていくことができる」と利点はアピールした。 西村氏は「ROBO-ONE」自体のことを「リスクがあって企業がなかなか行なうことができない部分を遊び心を持って埋めていけるのではないか」と位置づけているという。そういう部分は宇宙開発にも必要だろうと思って宇宙大会の企画を立ち上げたが、実際には「遊び心だけではなかなか宇宙には行けない」(西村氏)。いまはデブリ増大への危機感や金融危機、打ち上げ価格動向など各種事情から、宇宙に行ってロボット自体がゴミになったりゴミを増やしたりしないように、地上での評価試験を繰り返さなければならないと考えているそうだ。かなりの成功確率を持ってデブリを除去できるところまで行ったところで、相乗り衛星として手を挙げる予定だと述べた。また、従来開催予定とされていた宇宙大会開催スケジュールを2010年から5年延期し、2015年予定とすることも発表した。 なおROBO-ONE衛星は先日上がったJAXAの「いぶき(GOSAT)」との相乗り衛星に立候補して、落とされた。西村代表はブームを伸ばす東京大学の「PRISM」、親機と子機が分離して通信する香川大学の「STARS」にそれぞれ注目していると語った。 ROBO-ONE宇宙大会としては、軽量なミニロボットの活用促進、規格の統一標準化、マンマシーンインターフェイス向上のための「お手伝いロボットプロジェクト」の推進、地上での無重力実験やスラスターの研究などを進めていくという。
● 成果発表
Mission3の実機を使った実験では、まだ実際に着地はできていないという。スプリングとロックを使って床からの反力を吸収しようとしたが、実験のやりすぎで前日に壊れてしまったとのことで当日のトライは行なわれなかった。足裏にも衝撃吸収材を使っている。足裏は衝撃を逃がすために3分割している。だがいまのところ自然落下でも立てるかどうかは半々だという。
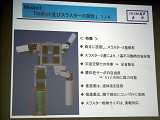
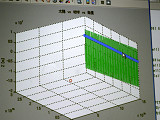
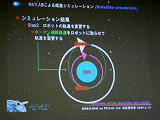
詳しい計算は行なっていないそうだが、6W程度の1回あたりの放電で出る力は0.6μN程度、440kmの極軌道から430kmの極軌道まで行くための推進剤の量は2g程度ですむ計算になるはずだという。足に付けたスラスタはそれぞれ軸を傾けることで回転姿勢を制御させる。シミュレーションは太陽、地球、衛星の3体問題で解いた。取りあえず初期条件だけの計算を行なったが、うまく円軌道にならず、制御のシミュレーションを行なう前の段階で終わってしまったそうだ。
Mission3はROBO-ONE本戦にも出られるようなロボットを想定して別途、設計を行なった。リアクションホイールを採用している。実機を使い、Labviewで垂直落下のデータを取った。その結果をもとにシミュレーションを行なったところ、シミュレーションでは着地に成功したそうだ。大会当日は実機での実験も行なったが、残念ながら不具合が発生。リアクションホイールが全く回転せず、そのまま落下してしまった。
● ロボットシミュレータ
杉浦氏が開発したシミュレータはセンサー信号を取り込むことのできるLabviewと連携することで、リアルタイムのシミュレーションを実行できる。この機能を応用するとロボットからのテレメトリデータから、たとえばロボットがどういう姿勢なのかといったことを、遠隔地からも把握することができる。このような機能を使ってもらいたかったという。 そのほかサーボモーターのトルクやゲインを変えることもできるし、各リンク長なども任意の値に変更できるので、自分が作ったロボットのシミュレーターとしても採用してもらいたかったと述べた。 また2体のロボットを物理シミュレーションすることで、ROBO-ONEのようなバトルのようなこともできる。視点も俯瞰だけではなくロボット視点に切り替えることもできる。今後は改良を続けながら「あまり精度を気にしないユーザー向け」に、今年の半ばくらいまでには販売するところまでもっていきたいと考えているという。
● 「宇宙大会シミュレーション」を兼ねたROBO-ONE1kg以下級バトル このあと、1kg以下級のバトルが行なわれた。急遽開催が決まったものにも関わらず8チームがエントリー。7チームが出場し、トーナメントを戦った。出場台数が少なかったこともあり、バトルトーナメントは同じ組み合わせで繰り返し2回行なわれた。それぞれ「1kg以下級予選」と「宇宙大会シミュレーション」と題された。「1kg以下級予選」は目視で行なう通常のバトルである。いっぽう「宇宙大会シミュレーション」はカメラで撮影した画像越しにロボットを操縦するバトルとして行なわれた。カメラ越しの操縦のほうでは一回戦は通常のビデオカメラで撮影したものをプロジェクターで見ながら、準決勝はUSBカメラ越し、最後の決勝戦は前の試合で優位だった側にBluetoothのカメラをロボットに取り付け、その映像を見ながらロボットを操縦するという形で行なわれた。 出場したロボットは、下記のとおり。 ・東京理科大学・部無線研究部チームの「サイコロ一号」 ・クボチームの「Black Rabbit」 ・イガアチームの「ソウガ」 ・kupakumaチームの「ウォルフラム」 ・チーム めたの「メタリックファイター ジュニア」 ・ごーすとチームの「Whil」 ・電気通信大学ロボメカ工房チームの「コセキト」
前述のように「宇宙大会シミュレーション」の決勝戦では、Bluetoothの小型カメラをロボットの機体正面に取り付けての操縦となった。ROBO-ONEのロボットは側面パンチを主な攻撃手段としているものが少なくない。「ウォルフラム」も例外ではない。真正面にカメラ1台だけでは、一番の決め技を、攻撃したい相手を見ながら行なうことができないことになる。だがkupakumaチームは経験から培われた操縦テクニックとズバ抜けた攻撃の「あてカン」でクボさん製作の「Black Rabbit」を粉砕。見事に勝利をおさめた。「Black Rabbit」も良くできたロボットだったのだが、相手が強すぎた。 なお入賞したロボットには辞退したロボットを除いて「ROBO-ONE」本戦出場権が与えられた。 一連の試合を見た日本ナショナルインスツメンツの古川氏は、貧弱なカメラ環境の下でロボットを遠隔操縦するためにも、これからはロボットからの情報を集約しないといけないのではないかとコメントした。ロボットのセンサー情報を集めることでロボットの現在の状況を操縦者の手元でリアルタイムシミュレーションすることができれば、ロボット自体の姿を見ることができなくても操縦できるからだ。 ROBO-ONEon PC、ROBO-ONE宇宙大会は参加者数が減少傾向にある。最後に西村実行委員長は「エンターテイメント性を持たせながら宇宙大会実現のための方策を練っていきたい」と述べて大会を締めくくった。
■URL ROBO-ONE http://www.robo-one.com/ ROBO-ONE on PC/Sat.3rd http://www.robo-one.com/sp/space_onpc3.html ■ 関連記事 ・ 「ROBO-ONE宇宙大会選抜競技」レポート ~さらに難しくなった「投げロボ」チャレンジ(2008/07/08) ・ マジンガアBパーツ、自由落下中の姿勢制御と着地に成功 ~「ROBO-ONEonPC/Sat. 2nd」レポート(2008/02/22) ・ 宇宙ロボット開発を目指す仮想宇宙大会 「第一回ROBO-ONE on PC / Sat.」開催(2007/01/30)
( 森山和道 )
- ページの先頭へ-
|