記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
「第29回全日本マイクロマウス大会」エキスパートクラスレポート |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2008年11月22日(土)~23日(日)に、つくば国際会議場において「第29回全日本マイクロマウス大会」が開催された。主催は、財団法人ニューテクノロジー振興財団。 ● 1/1,000秒を競う自立型知能ロボット
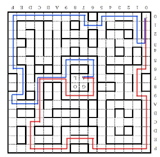
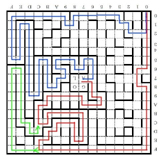
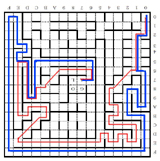
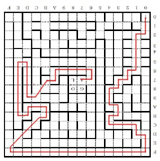
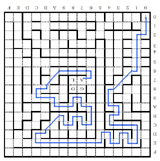
今大会はフレッシュマンクラスに100台、エキスパートクラスに85台のエントリーがあった。本稿ではエキスパートクラスの模様を中心にお伝えする。エキスパートの決勝には予選上位の18台と、8月~11月にかけて開催された東北・北陸・東日本(2台)・中部・九州の支部会、および学生支部会で優秀な成績をおさめた7台のマイクロマウスがシード権を得て出場した。 マイクロマウスの規格は、縦横250mm以内と定められている。これは第1回大会当時の規格のままであり、現在のマイクロマウスは手のひらに乗るほどのサイズになってきた。マイクロマウスが走る迷路は、1区画180mmの16×16区画で構成されている。迷路の壁は、高さ50mm、幅12mmで側面は白、上面は赤。路面は黒で塗装されている。 マイクロマウスは、迷路の左隅からスタートし、中央に設けられた4区画分のゴールをめざす。持ち時間はフレッシュマンとエキスパートの予選が7分、エキスパート決勝は5分となる。持ち時間内で5回の走行に挑戦できる。その中で走行時間がもっとも短いタイムを、そのマイクロマウスの成績とする。 もちろんマイクロマウスは、これから走る迷路の情報を持っていない。最初の走行はセンサーで壁を検知しながら動き回って、マップを記憶しながらゴールまでのルートを探す。この走行を「第一走行」と呼ぶ。多くのマイクロマウスは、ゴールに到達した後も未走破の区画を走り最短経路を探し続ける。探索走行を終了すると、次からは優勝を目指してゴールに向かって全力で走る。 今大会で使用された迷路は、下記になる。一番やさしい筈のフレッシュマンクラスの迷路も、ぱっと見ただけではスタート地点からゴールまでのルートを見つけるのは難しいだろう。しかもゴールに到達するには複数のルートがあり、必ずしも最短距離が最速距離とは限らない。直線が得意なマイクロマウスや斜め走行できるマイクロマウスなど、機体性能によって選択するルートが違うためだ。エキスパートクラス決勝のマップでは、赤ラインが最短距離、青ラインが直線走行の得意なマウスが好むコースと言える。
● 複雑な迷路をロボットが自走して探索する この競技の一番の見どころは、マウスが迷路を探索した後、目にもとまらぬスピードで全力疾走してゴールを目指すところにある。1/1,000秒を競うレースは、咳払い1つ許さぬ緊張感が漂う。もう1つの魅力は“探索の面白さ”だろう。競技をじっくり見ていると、迷路を探索する方式がマウスによってそれぞれ違っているのが見えてくる。ゴールまでの最短距離を見つけるためには、迷路を全面探索しなくてはならない。けれど、エキスパート決勝は持ち時間が5分と短いために、少しでも効率のよい探索をしなければタイムアウトになってしまうのだ。そのために、参加者達は賢い探索ルーチンを工夫している。 例えばエキスパート決勝のマップでは、スタート地点から直進してすぐのところに両側から壁が4枚出ている櫛歯状の部分がある。俯瞰することができれば、両脇は探索不要であることが明らかだが、マウスにはもちろんわからない。 基本である全面探索をするのであれば、櫛歯の間6カ所全部をチェックしなくてはならない。しかし、マウスが“スタート地点から1本内側にいる”と自分の現在位置を把握していれば、「迷路外側方向の櫛歯は行き止まりだから探索不要」という判断ができる。縦3のラインを事前に走行しているマウスならば、内側の櫛歯部分も「探索不要」という判断ができるようになる。 このような場所を探索する時に、参加者がプログラムをどのように工夫しているのか? マウスの動きを見て「賢いなぁ」と感嘆するようになると、俄然、マイクロマウス競技の観戦が楽しくなる。 この探索走行で、一番少ない歩数で効率よくゴールまで辿り着いたマウスには「探索賞」が贈られる。今年は、momoco08(米真一氏)が受賞した。
● エキスパートクラス決勝 ~今年も海外勢が上位を独占
Min5の探索を見ていると、迷路図手前側の【-】(壁)が縦に2つ並んでいるところを探索する時に、上部を波形に走行した後、反対側を1ブロックだけ戻りのぞき込んでいる。そして、「ここは探索しなくてもOK!」と判断したように、Uターンして先を急いでいる。他にも、探索済みの通路はスピードを上げて通過するなど、「賢いなぁ」と思えるポイントがいくつもあった。 Min5は、2回目の走行で6秒790を出して暫定2位に躍り出た。その後の走行でタイムを縮め、4回目の走行6秒433が優勝記録となった。 予選1位通過の「Golden Mouse(Soh Yi Lang氏)」が、Min5の後に走り記録を目指した。しかし、探索走行でエラーがあったようで、第2走行で最速ルートを走ることができず外側の直線を突っ走ってしまい壁に当たってリタイア。4回目の走行で追加探索をし、ラスト5回目は最速ルートを走ることができた。記録は6秒707で3位となった。 2位は「Golden Mouse」と同じくシンガポールのNanyang Polytechnic所属の「Cool Y v3a(Siew Peng Shorn氏)」が取った。同校からは、今大会に4名がエントリーしており全員が予選を通過している。 実は全日本マイクロマウス大会のエキスパートクラスは、2005年の第25回大会から、Ngee Ann PolytechnicとNanyang Polytechnicが1位・2位を独占している。Siew Peng Shorn氏に話を伺うと、同校では、ハードは学習用のマウスキットをベースに開発し、プログラムの作り込みに力を入れているという。天井に設置したハイビジョンカメラで迷路を走る様子を撮影し、直線・カーブの軌道を詳細にチェックしてプログラムの最適化をしているという。こうした情報を学生が共有し、レベルアップを目指しているそうだ。
今大会は予選を通過した18名のうち、日本人は6名だった。キャリアが長い社会人メンバーの多くが、プレ競技として開催されたハーフサイズマウスに力を注いだため、トップクラスのエキスパート競技へのエントリーが減っているのも一因と思われるが、いささか寂しい気がする。ちなみに6名のうち5名が学生だ。来年も若い世代の活躍に多いに期待したい。
■URL ニューテクノロジー振興財団 http://www.robomedia.org/index.html ■ 関連記事 ・ 「第27回マイクロマウス中部地区大会」レポート(2008/11/11) ・ 「第28回全日本マイクロマウス大会」レポート ~1/2サイズマウスがエキスパートクラスに登場(2007/11/27)
( 三月兎 )
- ページの先頭へ-
|