記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
「異なる時間スケールの階層性」と「全体から部分への分節化」が知能を創発させる? |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3月10日、独立行政法人理化学研究所 脳科学総合研究センター(BSI)において「研究会『創発と知能』―現実知としての科学と工学の融合について―」が行なわれた。独立行政法人 理化学研究所脳科学総合研究センターが主催、協賛は科学研究費補助金(萌芽研究)「空間性文脈認知の神経機構に基づくロボットの創発的行動決定の実験」(代表:我妻広明氏)。
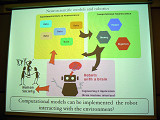
自然の営みにはハッとさせられるところがある。我妻氏はアマゾンの水没林での多様な生態系の例を話題として提供した。水没林とは、雨季だけに現れる自然の様相で、そのとき木の根元は水の中になり、魚のアロワナは樹上の昆虫をジャンプして捕獲する。そのようなものをロボットとして作ることは可能か。またコペラ・アーノルディ(Copella Arnoldi)という小さなメダカのような魚は、捕食者を避けるため、オスメスのつがいでタイミングを合わせて水上の葉に向かってジャンプし、そこで産卵と射精を行なう。さらに彼らはその卵に水をかけて乾かないようにする。これは単純な報酬による行動サイクルだとは考えにくい。どのようにこのような行動が発生したのだろうか。アロワナの適応的捕食行動はまだ分かるとしても、コペラ・アーノルディの行動はどのように理解すればいいのだろうか。彼らは何かを自覚しているのだろうか。 我妻氏はこの研究会の企画顧問でもある理研の谷淳氏が認知ロボティクス研究を始めたきっかけとしてしばしば披露するエピソードとして、ロボットが冷蔵庫からビールを出すという作業を挙げた。ロボットが冷蔵庫からビールを取り出して人に渡したとしても、そのロボットは自分の行動の意味を理解していないし、動機付けもされていない。現在のロボット研究を続けていても、そのように発展するとは思えない。 以前はコンピュータ技術者としてハードウェア設計に従事していた我妻氏。コンピュータと脳は、昔は速度や素子の数で比較されていたが、最近は、アーキテクチャから比較されていることが多い。コンピュータは自己完結的だが、脳は自己フィードバックを伴う内省的な面を持つ。自己完結されたシステムは規定された環境ではちゃんと動く。だが生物のようなシステムは、現実の環境に合わせて自分自身を変化させる生成的システムである。これを「現実的な知」というところで、さまざまな道具立てを使ってつめていくことが重要だと考えているという。 生物の場合は、行為を実行して認知するという循環が成立している。少なくとも自分の行為が成功しているかどうかは認知していると考えられる。その循環の形、情報の流れを真剣に考えたほうが良いだろうというのが我妻氏の考え方だ。知は循環のなかで規定されているが、生物独自、状況依存の情報の「かたち」を考えなければならないという。 たとえば川の流れや波を考えてみる。物質は変わっているが構造は保たれている。そのような意味で情報のフロー、構造を保持して安定させることで環境と内部の情報が循環しているのではないかという。大事なことは何が規定されていて、何が規定されていないのかを知ることだ。そのような考え方のもと原理的な研究を行なっている研究者と知能のファンクションから研究を行なっている人たち、という観点で講演者を集めたという。
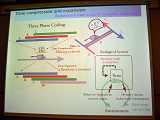
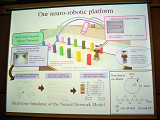
我妻氏自身は、今は脳のモデルを実装して現実のロボットや環境で本当に動くのかを研究している。このような脳型ロボットの取り組みはあちこちで行なわれている。たとえばNOMAD、DarwinI-XIというロボットは有名だ。脳型処理を行なうモジュールをただ繋いでいったときに、ちゃんと動くのだろうか。たとえばモジュールを単に重ねていくとどんどん処理が重くなって動かなくなるのではないかという疑問がある。一方、脳はうまくやっているようだ。 我妻氏らはこれまでの記憶に関与する部位とされてきた海馬の研究などを通して、その問題を解決する鍵は脳内の振動活動(リズム)なのではないかと考えている。 我妻氏らはこれまでに海馬のシータリズムと呼ばれる集団電位の振動に同期して活動する個々の神経発火の、位相のズレが記憶形成に重要な役割を果たすことを明らかにしてきた。振動の位相歳差を利用することで外界の情報を圧縮でき、そして脳はこの仕組みを用いてリアルタイムの情報循環をするために時間変換を繰り返し実行しているのではないかという。「脳の中では異なるタイムスケールの情報処理が並列して走っている」のだそうだ。この話についてもっと詳しく知りたい方には理研の広報媒体である「理研ニュース」のバックナンバーなどをご覧頂きたい。 現在、この仕組みを利用した海馬神経回路を移動ロボットにリモートブレインで実装して動かす「ニューロロボティクス・プラットフォーム」を作り、外部環境での行動体験の記憶を獲得する実験などを行なっている。また、このリアルタイムに動く脳型ロボット開発環境のプログラムソースを他の脳神経科学研究者や一般の方にも使える形で「ニューロインフォマティクス・プロジェクト」内の委員会の一つである、ダイナミックブレイン・プラットフォームで4月から公開する予定で進めているという。
● 「農業」のようなモノづくりの提案
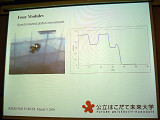
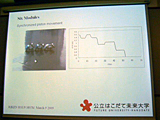
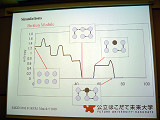
ロボットの目的や知能は上がっているが、ロボットを作る作業そのものはあまり変わっていないという。たとえばアクチュエーター、センサー、パワーがあって、それを組み合わせるところはどのロボットも何も変わらないからだ。小型のロボットでも大変だし、大型ロボットはもっと大変だ。そのためロボットを作ること自体が研究になってしまう側面がある。 開発を簡単にしようという試みはいくつかある。ニューラルネットワークを用いて、ロボットの制御部を学習することがその一つである。ここでは、ロボットのハードウェアの組み立てにかかる負担は軽減されないが、ハードウェアを制御するためのソフトウェアの開発にかかる負担は軽減できる。また、学習を導入することによって、ロボットの形状やタスクの変更に対する制御部の再開発が不要となり、より汎化的である。 学習を進めるためには評価関数を与えなければならない。ロボットに対して関数化しやすいものならば容易だが、「優雅に歩け」といったものを目標にして学習させるときには人間が評価しなければならない。ハルトノ氏はヒューマノイドロボット「PINO-R」を歩かせる研究の結果を見せて解説した。 コントローラーだけではなく、身体を進化させて作らせるという研究もある。ハルトノ氏自身もいまこのような研究を進めている。まず、ロボットのモジュールをいっぱい用意する。ロボットのモジュールを用意すること自体は簡単だが、難しいのはその組み合わせである。そこでモジュール同士が通信しあって1つのシステムとして動くことができれば、ロボット自体を作ることが簡単になるのでははないかと考えた。部品と環境を用意してあとは待てばロボットができる、そんな、セルラーオートマタのようなやり方でロボットを作りたいという。運が良ければ欲しいパターンのロボットができる。 ただ、すべて運任せも良くない。できれば少しは成功率を高くしたい。そのためには動かしたところで評価をし、それをフィードバックして繋ぎ方を変えればいい。ただその評価は、繋ぎ方を直接評価するのではなく結果の評価で行なう。 ハルトノ氏は実際の実験の様子を示した。PICと電池、モーターを組み合わせた、ある程度周期運動を行なう小型のモジュールを用意した。そのモジュールを繋げて、位相が合った動きを生成させる。ホタルの集団が明滅している間にだんだん同期してくるような現象をロボットで行なわせたわけだ。 問題は繋ぎ方のトポロジーだが、それをトップダウンでデザインしてしまうと本末転倒だ。だが現状のままでは成功率が低くて効率が悪い。繋ぎ方も自動で発見できるものにしたい。現状と、なってほしい状態がわかれば、いまの状態が良いか悪いかは分かる。本当はマクロな動きから評価したいが今の段階では1個ずつモジュールを見て評価を行なっているそうだ。具体的には角度のエントロピーを考え、それがミニマムになるようにする。2台の場合は合わせばいいだけなので単純だが、4台、6台に増やすとどうなるか。最初はまったくランダムに繋がっているので全く動かない。だがちょっと経つと少し動くようになる。中のつながりのパターンを見るとだんだん繋がってくることが分かる。
この仕組みはロボットのロバスト性を上げるためにも使えると考えているという。例えばロボットのどこかが壊れたときに取り替えるといったときにも使えるのではないかと考えられる。 さらに今後は「モノの作り方を変えていきたい」と語る。いまの製品は仕様を決めてデザインして作っているが、学習を使うことでソフトウェアは作らずにすませたいという。材料と環境を決め、そしてあとは進化させる、そういう形だ。 ただハルトノ氏自身は、自分自身の取り組みを以下のように捉えているそうだ。まずは環境と材料を決める。それを使って創発でなにかしらのモノを出す。それが何に使えるのかと考える。これは非効率に思えるかもしれないが、たとえるならば「農業」のようなモノづくりだとハルトノ氏は捉えているそうだ。「農業では、できたモノに対して仕様を決めているようなところがある。材料がふんだんにあり、簡単に再利用でき、プロセスが並列で走るのであれば、このようなものづくりも悪くないのではないか」という。たとえば農業でも土壌や肥料などある程度の制御をかけている。進化過程を使ってもある程度のゆさぶりは可能だろう。そのような過程でこれまでにない面白いモノができるのかもしれない。
● 関係概念を動的に獲得する柔軟な知能とは 理研BSI 動的認知行動研究チームの杉田祐也氏は「ロボットの行動を通じた言語理解」と題して発表した。テーマは「組み合わせ」だという。組み合わせは、未経験の認知タスクを、既知の知識を応用して解決する方法の1つだ。例えば「ボールを拾う」「缶を蹴る」という2つのタスクがあるとする。この2つを要素に分解して再び組み合わせて活用することができれば、「ボールを蹴る」というタスクもできるようになるかもしれない。「部分をまとめて全体を作る」というやり方がこれまでの説明だった。それはある程度うまくいくようにも思える。だが発達においては逆向きの現象がいくつも発見されている。まず全体を理解して、それを分解していくという過程が見られるのだ。また刺激や反応においては、要素は全体のなかに埋め込まれていることが多く、要素が単独で現れることは稀だ。つまり要素を直接的に学ぶ機会はまずない。なのに、どうして要素を組み合わせることができるのか。 学習するべき要素をどのように選ぶべきか。複合的な行為の全体としての関係として捉えることはできないか、と杉田氏らは考えて実験を行なった。まずシミュレーション上でロボットに複数の行為を教示して、まだ学習していない行為の組み換えを生成できるかテストした。実際にやったのは、車輪2つとカメラがついているロボットを動かしていき、対象(色付きの棒)に近づいたり、あるいは対象のほうにある角度を持って向きあう、といった単純な行為を全部で36個学習させた。環境側のほうは15通りの組み合わせがある。学習モデルにはパラメーターバイアス(PB)付きのニューラルネットワークを使い、ロボットに教示した行動時系列と、自己組織化された12次元の概念ベクトル間のマッピングを獲得させた。PBはネットワークを変調するモジュレータとして働き、概念ベクトルを表現する。
この実験ではロボットの行為は12次元の空間のなかに埋め込まれる。教えたものと異なるものを与えたときにもっともらしい概念ベクトルを計算できるかどうかを調べることで汎化性能を見ることができる。実際に、計算で得られたベクトルを使って行動させることで、うまく生成できたかどうか調べた。実験設定はこうだ。まず36種類の行為について120の異なる物体配置で教示例を作成し、次に一部の行為を教示した後、まだ教示していない行為を認識させて概念ベクトルを計算する。そして280の異なる物体配置を用いて、計算した概念ベクトルから、行為を正しく生成できるかテストした。 実験の結果、36種類の行為のうち20個程度を教えると、組み換えができる範囲が増えてきて最終的にすべての行為ができるようになった。実験のなかでは、操作に基づいて物体をカテゴライズするような結果も見られた。このようなものを自己組織化的に生み出すことは従来の人工知能的な役割ではできなかったという。今回のシステムでは構造的類似性を利用することで、まだ学習されていない行為がどこに来るか決まる。それによって汎化が起きたのではないかと考えられるという。 また同じ操作で対象が異なるものへの適応も見られた。これは役割や品詞が部分空間として概念空間のなかに、また要素概念は部分空間のクラスタとして表象されたことを示す。さらにそれの直積をとることで、ルールが合成できることが分かったという。このようなものが自己組織化的に生まれたことは大変興味深い。また部分空間には連続的な類似性を持つような構造も一緒に入っており、このことは連続的なものと、離散化されたシンボリックな表象が共存できることを示す。行為の例を学習しなくても、行為の関係が幾何学的配置として表れたのだ。 関係概念が動的に獲得できると柔軟な知能ができるのではないかといわれている。杉田氏らは、この研究ははそこへと繋がるものではないかと期待しているという。また幾何学的表象として学習結果が出てくるので、連続的な物理現実と、離散的な記号系とを結んで記号接地させるゲートウェイとしての役割も期待できる。そして、これまで連続的な発達や進化のパスを見ることが難しかった記号システムが、どのように連続的な過程で発達していくのか見ることができるのではないか、記号システムの創発メカニズムが説明できるのではないかと期待しているという。 最後に杉田氏は「従来の人工知能のように、まず合成できる表象を入れて、それを再利用できると言うのは話の順番がおかしい。表現しなければならないものの全体が分からないと、必要な部分要素は決められない」と指摘してまとめた。
● エンジニアが人の脳を研究する理由
中谷氏は、問題のかたち、知能や知覚といった言葉の定義、そして人を使って研究している理由と現状を解説した。脳の不良設定問題の解き方においては、異なるタイムスケールによる階層型処理と予測結果のフィードバックが重要なのではないかという。 脳活動を計測すれば現象論的なことは分かる。だが工学の立場から知りたいことは、現象論ではなく脳における情報処理の計算論である。そのためには認知神経科学の実験がどんな仮説や思想に基づいているのかをまず明らかにしなければならない。そして方法論を確立すれば人の脳機能理解が進むかもしれない。次に問題の具体的な形だが、脳はコンピュータと比較すると非常に遅い計算素子を使っているにもかかわらず、複雑な情報を直感的に処理できる。もともと電気系にいた中谷氏は、脳に学ぶべき情報処理があるのではないかと考えていたという。では脳というお手本があったときにどうやってそれを実現するか。なお中谷氏自身は「知能」=「人の能力」という見方には疑問を持っているそうだ。 脳の高次機能は自然言葉で定義されている。まず、知能とは何か。「知」という漢字には、「矢」のようにまっすぐに物事の本質を「言い当てる(口)」という意味が含まれているそうだ。中谷氏も「知」というときにはこの性質を考慮に入れることが必要ではないかと考えている。たとえば複雑な状況下で情報を選択していくことを考えよう。コンピュータのようにif~thenで全探索するやり方もあるが、それを見ても人間はそれを知的な存在だとは思わない。中谷氏は「言葉の意味を科学や工学で扱えるように定義してから研究にあたることは重要だと考えている」と述べた。
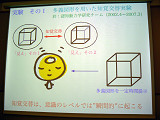
将棋においても、コンピュータ将棋ソフトウェアは、次の手を指すときにはルール上可能な手をすべて全探索して読む。だが人間の棋士の場合は、局面を見ると直感的に何をすべきかわかる、という。人間は知識や経験に基づいて何をすべきかすぐに分かることが多々ある。脳における情報処理の仕組みはどうなっているのだろうか。もともと将棋に詳しかった中谷氏は、2007年3月に行なわれた将棋ソフトウェア「ボナンザ」と渡辺明竜王との対戦後の、ボナンザ開発者・保木邦仁氏のコメントを聞き、将棋における直感的思考を調べることで、脳における情報処理の違いを調べることができるのではないかと考えた。特に将棋では人間とコンピュータのやり方の違いが明確なので、直感的な知能の仕組みのヒントを探る上で役に立つのではないかと考えているそうだ。 さて、「知能」という言葉には「能」という漢字も含まれている。これはabilityだと考えられる。また「知覚」の「覚」の文字は「心にすっと入ってくる」ことを意味する。これは、無意識の情報処理過程が、意識上の処理に移ることだと中谷氏は考えた。つまり知覚とは、瞬間的に無意識の情報処理が意識上に上がることを意味することになる。では、「瞬間」というのは脳の処理過程でも本当に「瞬間」なのか。中谷氏はまず多義図形(ネッカーキューブのように2つ以上の見えがある図形)を使って研究を行なった。脳波を計測すると、多義図形の知覚交代に関連した脳活動は少なくとも700mm秒は続くと分かった。つまり知覚が交代するのは一瞬だが、実際には知覚が交替する一秒弱前から脳の活動は始まるということである。意識上の「一瞬」と脳活動の長さは対応するわけではないのである。なおこの研究の詳細は理研BSIの広報誌にも掲載されている。 さて、知覚は「心にすっと入ってくる」ことだが、では心とは。中谷氏は、外界の事象の要素が集められてイメージになった「メンタルモデル」を仮定して、知覚処理の中身を考えてみた。頭のなかに思い浮かぶことは全て脳のなかにメンタルモデルが既に形成されているからだと考える。脳は外界の情報処理をするときにもメンタルモデルを使って感覚入力を処理して、意味づけしている。これは計算論的な立場からは、情報が不足している「不良設定問題」を解いていると考えられる。適切な拘束条件がない問題は解が1つに決まらない。これが不良設定問題で、外界の情報処理の多くはこれにあたる。
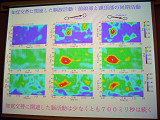
中谷氏は、脳は拘束条件を自分で作って問題を解いていると考えている。どうしているかというと、刺激が入るとまず、粗いが速い処理で拘束条件を作ってしまい、それを低次の処理系に送り返すことで細かな処理を行なっているのではないかという。粗い処理を行なうときに既に脳のなかにあるメンタルモデルを使っているのではないかという。このように、知覚過程は速い処理と遅い処理の、少なくとも2つのプロセスからなるのではないかと考えた。 知覚過程には階層性が必要であり、階層性を持つことでさまざまなレベルで事象を表現できる。ただ一般的には刺激の処理は低次→高次へと進むと考えられているが、拘束性は上位の高次の処理部分で作られるべきだと考えられる。 では実際にそうなっているのか。中谷氏らは将棋の駒組みの認識を使って実験を行なった。定跡型とでたらめに駒を並べた将棋の駒組みを刺激として見せて、そのときの脳活動を計る。両者を普通に見たとき熟練者であればすぐに違いが分かるような刺激だ。この刺激を使って、まず詳細な情報を見たあとに区別を付けるのか、それともじっくり見てから判断するのかを調べた。まず、駒組みを見るためには眼球を動かさなければならないように、駒組みは中心から少しずれたところに提示されるようにした。こうしておいて目の両脇に電極を張った状態で脳活動を脳波で計測すると、脳の反応が眼球を動かす前に起こるのか後に起こるのか計測することができる。 そうすると、熟練者(アマチュア四段)の場合は、刺激を提示した200~250mm秒後、眼球を動かす前に頭頂部に反応が表れた。周辺視野にあってまだ十分に各駒が認知できないような段階から、棋力の高い人は定跡型とでたらめな並べ方の区別がついている可能性を示す結果だという。このことから中谷氏は速い処理は存在し知識や経験に依存するのではないかと考えている。次の課題は、何を手がかりにしてどのように拘束条件を生成しているかだ。
感覚入力は刺激による誘発活動だが、メンタルモデルは内部のシステムダイナミクスによって誘発された活動だ。知覚交替は刺激は変わらないわけだから、内部ダイナミクスによって起きていると見ることができる。非線形非平衡系である内部ダイナミクスに刺激が入ってきたときにどのようなことが起こるのか。その力学的特性が分かれば問題は解けるのかもしれないと考えているという。まだ研究は進めている段階だという。 さて、速い処理とは、入力と出力の時間差が少ないということだ。中谷氏は、脳はこの問題を解くために、予測しているのではないかと考えている。これからは、予測の考え方を入れていくことで脳の知覚機能をさらに理解していきたいと考えているという。
「コンピュータもいろんなことができますよね。単に全探索するだけならコンピュータでもいいのかもしれない。でもプロ棋士の手や作家の文章のようなものをコンピュータは生み出せない。全探索ソリューションから出てくるものと人間が生み出すものとは何か違うような気がする。脳を搭載したような知的なロボットを本当に作ろうと思ったら、そこに踏み込んでみて現実に使えるのかどうか、何か社会の発展に繋がるのか考えないといけない」(我妻氏) 前述のように我妻氏はコンピュータのハードウェア設計に携わったのち、脳の研究に従事したという経歴を持つ。コンピュータ関連に従事していたときは当時の時代背景もあり、人工知能技術も将来はコンピュータのパフォーマンスが十分に上がれば良い線をいくのではないかと考えていたそうだ。だがその後、単に探索ツリーだけでは状況を判断するような知的なコンピュータはできないと考えるようになる。そこで生物の脳を勉強しようと考え、大学に入りなおして数学と生物の情報処理の仕組みの基礎を学び直したのだという。 CPUでできることと、脳の回路とではどう違うのか。理研に来た最初の5、6年は主に記憶において重要な働きをすると考えられている「海馬」の数理モデルを作っては計算機実験(シミュレーション)を行なっていた。だが、そのモデルが本当に使える計算原理を表現したものなのかどうかは、「現実知」として動くことが検証されないとコンピュータと比べられるところまで行かないのではないか。そこで、ここ数年は脳型情報処理機構を搭載してロボットを実際に動かしてみようとしている。それが前述した海馬の情報処理の仕組みを使ったロボットによる外界の探索経験の記憶の研究や、粒子系シミュレーターを使った現実世界のタイムスケールと内部モデルのタイムスケールを協調させる研究だ。「そんなことは他のシステムでもできるよ」と批判されることもしばしばあるという。だが、リアルな環境変化に合わせて記憶や状況判断できるシステムを作る――。それが目標だ。まだまだ時間はかかると思うが、動物のように現実世界で本当に動ける、そして自分が何をしているのか自覚できる人工物が誕生する日に期待する。
■URL 理化学研究所 脳科学総合研究センター http://www.brain.riken.jp/index_j.html 研究会「創発と知能」(第一回) http://www.dei.brain.riken.jp/~hwaga/ei_workshop/resume_2009_EI_web.htm ■ 関連記事 ・ 臨機応変なロボットのヒントは脳にある? -理研BSI-トヨタ連携センターの取り組み-(2008/06/06) ・ 将棋で探る「直感」の秘密 ~理研と富士通、日本将棋連盟が脳の高次機能に関する共同研究プロジェクトを開始(2007/08/07) ・ シンポジウム「理研における人間共生ロボティクス」レポート(2006/11/01)
( 森山和道 )
- ページの先頭へ-
|