記事検索 |
最新ニュース |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ブレイン・マシン・インターフェイスによる機能代償システム研究の現状 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
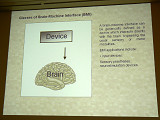
「ブレイン・マシン・インターフェイス(BMI)」とは、脳と情報通信機器を直接繋ぐ技術である。応用として、失われた感覚や運動機能の人工的な再建、人工器官による代償機能の構築のほか、非言語・意識下のコミュニケーション技術、そして神経科学の新しいツールとしての役割が期待されている。人工内耳や、パーキンソン病のような運動障害を対象にしたものは実用化されつつあり、脊髄のシミュレーターもできており、その他の医学的問題も解決できるのではないかと期待されている。また医学的問題だけに留まらず、脳の信号を解析することができ、筋肉の信号に変えることができるのであれば、コンピューターや車椅子に組み込むことも可能となるかもしれない。 今回のシンポジウムは英国大使館の支援によりイギリスからBMI研究を行なう研究者たちも出席して、公開で行なわれた。シンポジウム冒頭、日本学術会議会長の金澤一郎氏、イギリス政府主席科学顧問兼科学技術局長のジョン・ベディントン(John Beddington)氏、大阪バイオサイエンス研究所所長で文部科学省脳科学研究戦略推進プログラムディレクターの中西重忠氏、ニューカッスル大学神経科学研究所長のコリン・イングラム(Colin Ingram)氏らが登壇して挨拶を述べた。 ジョン・ベディントン氏は「科学者は競争が好きだが目標達成のためには多方面からのアプローチと協力が不可欠。一般の人には科学への不信感もある。この工学技術が将来どういった方向に向かうのか、何をもたらすのか示してほしいと思う」と述べた。
なお本誌ではこれまでにもBMI関連のシンポジウムレポートなどを何回かお送りしているが、今回の内容は特に2006年11月に行なわれた「脳と機械を繋ぐテクノロジーのいま~「脳を繋ぐ」分科会レポートと重なっている点も少なくない。興味がある方は合わせてお読み頂きたい。 ● 脊髄の電気刺激による運動機能の再建
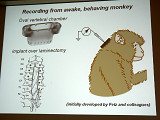
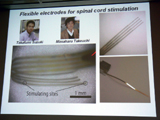
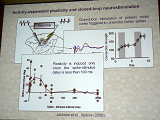
四肢麻痺や脊椎損傷患者の多くは特に手の機能の回復を望んでおり、その解決手段の1つとしてBMIが期待されている。だが、開発には2つの課題がある。1つはできるだけ温存された機能を利用したほうがいいわけだが、どのように動きを誘導するか。2つ目はどのようにしてコマンド信号をつかむか。1つの手法としては直接、筋肉や末梢神経を刺激する機能的電気刺激(FES)という手段がある。だが筋肉は、たとえば大きなモーターユニットは早い伝導速度を持ち、小さなモーターユニットはゆっくりしている。最初は小さな単位、次に大きな運動単位が誘導される。その組み合わせで筋肉は滑らかに動くようになっている。伊佐氏らは末梢神経ではなく脊髄を刺激する方法で運動機能再建を目指している。 動物実験による研究の結果、中間ニューロンを使うと目的を持った動きが可能になること、2点の違う刺激を組み合わせることで別の動きを起こすことができることが分かったという。把持動作を起こすことができるだけではなく、持続的に刺激することにより静止状態を維持することもできるようになった。柔軟性のある電極を用いると従来のマイクロワイヤー方式に比べるとグリオーシスがあまりなくて電極が長持ちするそうだ。また、回復段階に応じて脳の病変部位の活性部位が変わることなども分かってきており、今後も研究を続けていくという。
● BMIを使うことによる運動機能回復の可能性
また、BMIで通常の感覚運動系をバイパスするアウトプットを起こしていると脳と末梢の筋肉両者の結びつきが強くなり可塑性が上がってくるという話も紹介された。正常な場合、脳からの信号は脊椎を経由して、筋肉に投射される。だが脊椎損傷になるとその間が断たれて筋肉が動かせなくなる。そこで脊椎をバイパスして人工デバイスで信号を解析して筋肉を動かそうというのがBMIによる機能補償の考え方だが、これを行なっていると、フィードバックループと神経系の可塑性によって両者の結びつきが強くなってきて、機能の一部が回復する可能性があるのだという。ただしそれには刺激のタイミングが重要な要素になる。また電極や刺激頻度の問題などを解決する必要があるが将来は臨床応用が可能になると考えられるという。
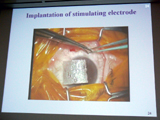
臨床応用するためには長期間、安定して使える電極が必要だ。それについてはベイカー教授が説明した。多くの電極は、埋めた直後はいいが、信号の質がだんだん劣化してくる。たとえば5日目は良かったが6日目は急にダメになったりするのだそうだ。電極を抜き、また別の場所に刺すと信号が復活することから、電極の問題ではなく、電極を入れたことによる組織編成が問題であると考えられる。グリオーシス、グリアによる瘢痕ができるのだ。 ベイカー氏らのグループでは、グリア細胞の反応が起こるのは力学的な微小動揺性、つまり組織のなかで電極が動くからではないかと考えている。よって、神経組織と電極の間の動きのミスマッチを除去することが重要だという。これまでの電極はどれもまっすぐで硬いものが多かったが、バネのような正弦曲線を持った形状にし、さらに先端を大きくして、組織と一緒に動くようにした。シャフト部分はポリマーでできている。通常の電極が硬い理由は、そのほうが埋め込みが容易だからだ。ベイカー氏らの電極は挿入が難しい。そこで挿入用の道具も改良し、ポリエチレングリコールを使って、テストをした。ウサギを使ったところ、12カ月後でも安定した記録が取れたという。これらプラットフォーム技術を開発していけば色々な応用がありえるだろうと述べた。
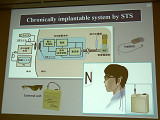
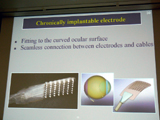
● STS方式を使った人工網膜
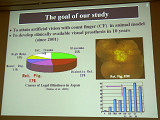
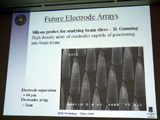
人工網膜には網膜の状態や電極をどこに入れるかによって、いくつかのアプローチがある。たとえば光受容体はなくなっても内部の神経節細胞は残っていると、そこに光情報を変換した電気刺激を送ってやれば、視覚を得られるかもしれない。ただし細胞に直接電極が接してる場合、電流のアンペア数が高すぎると残存している細胞を焼いてしまいかねない。そこで不二門氏らは眼球の強膜を半層切開した部位に刺激電極を設置する「Suprachoroidal Transretinal Stimulation(STS方式)」と呼ばれる方式で人工網膜を実現しようとしている。この方式では電極は網膜に直接接触しておらず、手術のときにも網膜を傷つける可能性が低い。ウサギを使った実験で刺激電流は0.7mAh以下で、0.5ms刺激するのが長期間の安定の閾値であることを見出した。 電極にはプラチナ電極を使っており、49本あるプラチナ電極のうち9本を用いている。手術時間は1時間くらいで、2時間、視覚のテストをしたところ、大豆からピンポン玉くらいのサイズのフォスフェンを感じることができたという。なお電極の位置とフォスフェンの位置は1:1ではなかった。 また、電気刺激による神経保護の研究についても述べた。いまのところ神経成長因子のIGF-1が電気刺激のあとの神経保護において重要であること、またmRNAが電気刺激のあとに増えることなどが分かっているという。人工網膜を用いることで、読んだり、歩いたりできるようになることが被験者のQOLにおいては重要だが、そのためにはもっと多くの電極が必要であると述べた。また電極の材質もプラチナからイリジウムオキサイドに変えようと思っているそうだ。 Q&Aでは「電極の密度があがっても個々のニューロンを刺激しているのではないので、これ以上の解像度向上は無理ではないか」という質問が出た。不二門氏は「確かにそうかもしれないが解像度を上げることは可能なのではないか。電極表面と刺激されている距離は50~100umくらいあると考えられる。これはもっと改善できるだろう」と答えた。なお電極は網膜に接続しているわけではなく、強膜についているので、眼球を動かすことも将来は可能だと考えられるという。
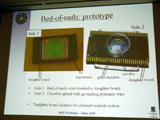
● 高解像度人工網膜の開発
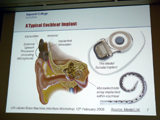
● 人工内耳、人工前庭器官
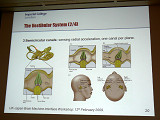
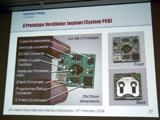
また内耳は聴覚だけではなく、バランス、平衡感覚も司っている。人間は加速や動きを三半規管の耳石で感じる。3軸ジャイロとほぼ同じ働きである。コンスタンディノウ氏は「人工前庭器官」の研究の現状についても述べた。前庭の感覚毛は蝸牛とほぼ同じ性質を持っているが、前庭器官は骨のなかに埋まっており、手術が難しく、またパワーとサイズにおいても技術的な課題があるという。だが今は第2世代のチップを開発中であり、新しいマイクロテクノロジーを使うことで、完全埋め込み型の内耳も可能になるのではないかと述べた。将来は化学的なセンサーを使うことで筋肉の活動によるノイズを除外することもできるかもしれないという。
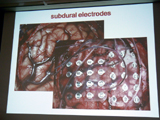
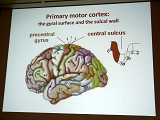
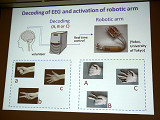
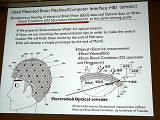
● 皮質脳波(EcoG)を使ったロボット義手コントロール
硬膜下電極で計測できるのはEcoG(Electrocorticogram、皮質脳波)だ。頭蓋の外から計測するEEG(脳波)に対して、頭蓋内の脳表面から計測するEcoG(皮質脳波)は空間解像度が高い。また、電極を刺すわけではないので脳細胞を傷つけず、侵襲性は比較的低いと考えられる。吉峰氏は、東京大学の横井浩史准教授らと共同で行なっている研究の成果を示した。被験者の運動野上の中心溝内EcoGの信号を解析することで、高い精度で運動を推定し、リアルタイムに近い形でロボットアームを動かすことができたという。また、慶應義塾大学理工学部の牛場潤一氏らとカーソルを動かす研究なども行なっている。 『潜水服は蝶の夢を見る(原題:The Diving Bell and the Butterfly)』(ジャン=ドミニック・ボービー著、講談社)という本がある。著者は43歳の雑誌編集長だったが、脳出血で倒れる。そして周囲の状況を知覚し理解することはできるが、全く身体を動かせない状態に陥ってしまう。喋ることもできず自分の意志を外界に表現できない。「ロックトイン・シンドローム(閉じこめ症候群)」と呼ばれる身体的自由を奪われた状態に陥ってしまった著者は、残された唯一の身体機能である左のまぶたを動かすことでこの本を書いた。この本は映画化され、「ロックトイン・シンドローム」の知名度を上げた。 「閉じ込め症候群」は卒中や外傷、神経性疾患によって起こる。効果的な治療法はなく回復の可能性もほとんどないという。BMIはこのような患者にとって有用な技術となることが期待されている。吉峰教授らはボランティア患者の協力を得た研究データを示した。だが、麻痺の長い既往歴があった人ではうまくいかない傾向があり、これはおそらく皮質内の機能再編成が起きてしまったからではないかという。また感染の問題も大きいようだ。これからも工学的な技術チャレンジと数学的解析技術が必要だという。
● 「最先端のサイバニクスとBMI/BCI」
「HAL」は2つの操作系が入ったハイブリッドコントロールシステムを採用している。1つは脳が筋骨格系を動かそうとするときに流れる生体電位をベースとした操作系で、もう一つはロボット的な自律系だ。山海教授は筋ジストロフィーの患者やポリオ患者、脊椎損傷の患者、下肢麻痺患者がHALを着用して体を動かす様をビデオで示した。今年の1月からは、ヘッドマウント型の計測装置「ヘッドマウント・ブレインインターフェイス」を使って、HALシステムを長期に使った場合、脳にどんな影響を与えるかについても調べているという。 Q&Aでは、何回のキャリブレーションが必要なのか、いくつのセンサーを使っているのか、四肢切断などでセンサーを付けられない患者の場合はどうするのか、そして、今後の課題に関する質問などが出た。
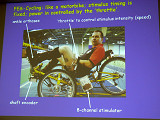
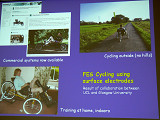
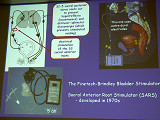
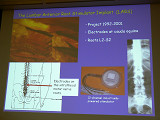
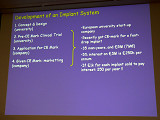
● 埋込刺激装置による機能的電気刺激を使った運動
ドナルドソン氏は脊髄損傷患者が在宅で運動するための3輪自転車を紹介した。リカンベントという自転車があるが、あれと同様に寝転がって乗るタイプで、クッションを使ったラグビーのようなルールのゲームを行なったり、道を走ることができる。8チャンネルの刺激装置がついており、患者は自分で刺激強度をコントロールできる。そして脚を動かすのだ。既にドイツのメーカーから「RehaBike」として市販されている。ただし電極を付けるのに1時間、外すのに30分も時間がかかってしまうのが難点だという。それではただでさえ生活のさまざまな局面において時間が奪われる患者の生活時間をさらに奪ってしまう。そこで、患者に電極をインプラントすることで、所用時間を短くしてQOLを上げることはできないかと教授らは考えた。 インプラントの技術は実は歴史的には古く、規制の関係もあって、昔のほうがさまざまな実験が行なわれていた。特にブリンドレイはシンプルな技術を使って疼痛を減らす装置や、排尿を助ける装置など多くのデバイスを開発した。BMIの概念も1960年代末から既にあり、初期の実験でも松葉杖を使ったスイング歩行ができるようになったというものがある。1980年代には全長6mのケーブルを体内に入れて電極刺激を行なうといった実験も行なわれたが、感染の問題があり中止された。 ドナルドソン氏らは12チャンネルの電極を腰椎の前神経溝に入れることで、下肢の筋肉を刺激することを試みた。十分な膝モーメントが得られなかったためウォーキングでは良い結果は得られなかったが、サイクリングはうまくできたという。どこに電極を入れたらうまくできるのか、どのようにすればパワーのアウトプットを増せるのかといった詳細は、まだ1人にしか実験を行なっていないので分からないという。 研究においては、患者数そのものが多くないため、チームを組んだり、協力してくれる会社を見つけるのが難しい点が問題だという。ドナルドソン氏は実際に経費を概算した結果を示し、研究を発展させて、実際に被験者たちのQOLを上げられる技術を実現することの難しさを強調した。
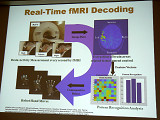
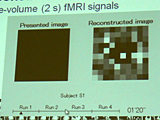
● 脳機能の理解を深める手段としてのBMI
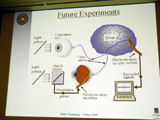
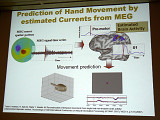
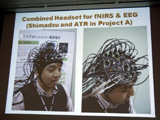
川人氏はBMIコンテクストにおける「スパースネス(sparseness)」という考え方を強調した。最近、脳のモデルあるいは画像・音声処理のデータ解析などで用いられている考え方で、たとえば画像データを処理するときに効率が良くなるように全体を分解し、より少ない要素で表現した形で情報がコーディングされていると考えるもの。分解された要素は局所的な構造を持ち「疎(sparse)」な形で脳内の情報表現は行なわれているのではないかとする。たとえば網膜から入力された情報はより少ない数の細胞で脳内でスパースに表現されると考える。運動指令などについても同様に考えられる。情報が「疎」に表現されていると仮定することで、たとえば少数の情報からオリジナルの入力情報を再構成できる。そのためには適切なニューロン群を抽出することで変数を減らし、情報を適切に再構成することが重要になる。昨年発表された、脳活動パターンから知覚画像を再構成したという研究にもこの考え方が用いられている。 川人氏らのグループではfMRIとMEGやNIRS、EEGなど複数の非侵襲の計測手段と階層型ベイズ推定法を組み合わせることで脳機能計測の空間分解能と時間分解能を高めようとしている。これを「ブレイン・ネットワーク・インターフェース(BNI)」と呼んでいる。これらの計測手法を利用し、脳の中では信号分離されて疎に表現されていると考えられる解を、計測された信号から逆問題として解く。これによって、たとえば腕の動きをMEGデータから再現したりすることも可能になっている。デコーディングは基礎的な脳科学のためにも重要であり、脳活動や身体の非線形なダイナミカルな関係を見ることが重要だという。
■URL 文部科学省 脳科学研究戦略推進プログラム http://brainprogram.mext.go.jp/ 英国大使館 http://ukinjapan.fco.gov.uk/ja/ ■ 関連記事 ・ 脳と機械を直結するBMI技術は身体観や人間観を変える ~「日本生理学会若手の会 サイエンスカフェ 身体と機械の境界」レポート(2008/09/16) ・ 脳と機械を繋ぐテクノロジーのいま(2006/11/15)
( 森山和道 )
- ページの先頭へ-
|