記事検索 |
バックナンバー |
【 2009/04/17 】 |
||
| ||
【 2009/04/15 】 |
||
| ||
【 2009/04/09 】 |
||
| ||
【 2009/04/06 】 |
||
| ||
【 2009/04/03 】 |
||
| ||
【 2009/03/27 】 |
||
| ||
【 2009/03/24 】 |
||
| ||
【 2009/03/18 】 |
||
| ||
【 2009/03/11 】 |
||
| ||
【 2009/03/06 】 |
||
| ||
【 2009/03/04 】 |
||
| ||
【 2009/02/27 】 |
||
|
|
|
|||||||||||||||||||||||||||||||||||||
|
洋ロボ「ロボパピィ」レビュー |
|||||||||||||||||||||||||||||||||||||
|
~買って遊んで分解しました
|
|||||||||||||||||||||||||||||||||||||
|
Reported by
白根雅彦
|
|||||||||||||||||||||||||||||||||||||
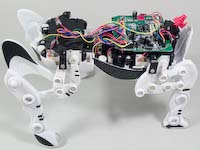
● まずは構造。独特なデザインだが、実は機能的
しかし、電源を入れてしまうと印象は変わってくる。ロボパピィは倒れる、起き上がる、お手をする、おしっこする、といった実際の犬のように動くので、停止時に見られた非動物的な印象は、徐々に薄れ、ペットらしく感じられてくる。
ロボットマニアの視点で構造を見てみると、合理的なデザインであるとも感じられる。足が細いのは、太くする必要がないからだ。リンク機構を動かすモーターは胴体内に入っているので、足が太くなる必要はない。体重を支えるだけならば、骨組みだけで十分だ。むしろ足が細いことで、可動範囲が広がっている。 モーターの数は、足に各1自由度、腰(頭も連動する)に1自由度の合計5自由度がある。それぞれ、ちゃんと角度制御されているようで、電源を切っているときに強引に足を動かしても、電源を入れると正しい角度初期位置を補正する。 それぞれの足は1自由度しかないため、1次元的な動きしかしないが、前足・後ろ足ともにかなり前方にまで振り上げることができる。リンク機構によって動く足先は、緩やかな曲線を描く感じで、近似直線を描くといった複雑なものではない。別にリンク機構でなくても良さそうにも見えるが、あえてリンク機構を採用したのは、デザイン上の問題が大きそうだ。
自由度(=モーターの数)は少ないが、アクションは豊富だ。たった5自由度で、前後に歩く、左右に方向転換する、転がる、起き上がるといったアクションができる。なるほど、ロボットは自由度数が多ければ良いというものではないのだな、と感じさせるデザインだ。 ● そして知能。「操縦」するではなく「一緒に遊ぶ」のがロボパピィ流 ロボパピィにはリモコンがあり、前後左右への移動や芸(ワザ)などのコマンドを送ることができる。このコントローラーを使ってロボパピィを自由に動かすこともできるが、ロボパピィは操縦して楽しむタイプのロボットではない。ロボパピィは基本的に、電源が入っている限り、自動で動き続ける。飼い主はそれに対して、「褒める」や「叱る」といったコマンドを送ることで、コミュニケーションと成長を楽しむ、というイメージだ。
ここが日本のペットロボットだと、人間の反応を見るためのCCDや各種センサをどっさり積んでしまうところだが、ロボパピィはそのインターフェイスをリモコンにすることで、簡略化している。アメリカらしい合理性だ。 リモコンがメインのインターフェイスとはなっているが、ちゃんとセンサーも搭載している。胴体にはサウンドセンサーがあり、周囲の音に反応することもできる。頭部全面には赤外線センサーがあり、前方にかざされた手を認識してお手をしたり、歩行中は障害物を認識して停止もできる。あごには机などの端を認識するエッジセンサーも搭載している。さらに、マニュアルには明記されていないが、傾きセンサ(おそらく加速度センサ?)も搭載しているようで、横倒し状態を認識して起き上がったりもする。 もっとも、ロボパピィはかなり勝手に動くので、それらのセンサーがちゃんと働いているかはちょっとわかりにくい。とくにエッジセンサーについては、後ろに進んだり横に転げたりするロボパピィにとっては、卓上などからの転落防止の役に立たない。勝手に動かす場合は、転落の危険のない床面でやった方が良さそうだ。 あと、ちょっとお間抜けなのはこのロボパピィ、電源を切ると学習内容を忘れてしまう。毎回過去を忘れてしまうペットというのも寂しい限りだが、長期学習させても、9個の芸の優先度パラメータが上下するだけであろうから、あまり賢くなるというほどではない。むしろ毎回新鮮な気分で遊んでやってくれ、ということだろう。 ついでに気になったのは、コントローラーの移動ボタンのアサインだ。ロボパピィは、向かい合って操作するようにデザインされている。そのため、例えば右ボタンは「向かって右、すなわちロボパピィからすると左に進む」となっている。しかし、なぜか前後ボタンはロボパピィから見た前後になっている。意図的に操作しにくくしているのかもしれないが、ちょっと戸惑いを感じた。 ● もちろんマニアックに分解調査。中身はシンプル・低コスト ひとしきりロボパピィと遊んだところで、お約束の分解をしてみた。もちろん、こうした分解は保証の範囲外になるので、自己責任で行なって欲しい。分解の難易度はそれほど高くないが、ロボット製作の経験がない人には、壊さずに分解するのは難しいだろう。そもそもペットロボットを腑分けするというのは、あまり気持ちがよい行為でもないので、あまりおすすめしたくない。
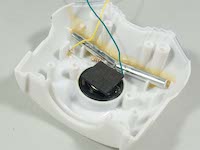
ロボパピィの胴体は、胸部と腹部に分かれている。ネジを外すことで、それぞれの背面を取り外すことができる。胸部側に主基盤があり、そこから足や腰のモーター、センサーなどに繋がる配線が内部に張り巡らされている。 各足のモーターユニットは、モーターとギアボックス、そして角度センサーが一体となっている。そこから5本の配線が基盤に向かって伸びている。見たところ、2本がモーターに繋がっていて、あとの3本は、角度センサーと見られる部分に繋がっている。 角度センサーのピンを調べてみると、筆者の手持ちのテスターでは、角度に従って抵抗値が変わるといったことは検知できなかった。ある角度になると通電して、ある角度では通電しなくなる、というようにも見られたので、角度は3端子(1端子がグラウンドで2端子のON/OFF)で検知しているのかもしれない。だとすると、かなり大雑把ではあるが、アナログ・デジタル変換が不要となり、かなりシンプルな作りということになる。
主基盤の裏側には、頭脳部のチップとおぼしきプリントパターンが見られた。しかし肝心のチップ部分は、黒い樹脂に覆われて見ることができなかった。チップは40ピンで、パラレルIOと見られるピンが30本以上ある。ワンチップマイコンとして有名なPICシリーズに、そのような製品があるので、その辺りを利用しているのだろう。秋葉原で個人が1個単位で買っても500円以下のシロモノだが、ロボパピィには十分な性能だ。
全体的に作りはシンプルだ。自由度(モーター数)が少ないので、一個のワンチップマイコンで、すべてを制御している。コストを考えると、このくらいシンプルになるのは当然ではあるが、それだけに分解してみると、ロボットの知識が少しあるだけで、仕組みが理解できるのが面白い。
● 価格の割には良く動く! 正直、それほど奥の深いオモチャでもない。単4電池4本で2時間ほど動くようだが、2時間遊べるかも怪しい。子どもならそれなりに楽しめそうだが、この細い手足は、子どもが扱うとすぐに壊してしまいそうな印象も受ける。しかし、ロボットマニア的視点で見ると、7,000円という価格の割には良くできていると思う。むしろ、これだけの動きをさせながら7,000円に収めるための工夫、モーターを減らしたりリモコンを活用する点などが、むしろ面白い。少々うがった視点ではあるが、ロボットホビイスト的には、自作ロボットの参考になるという意味で、7,000円の価値が十分にあるだろう。 ■ 関連記事 ・ 日本トイザらス、犬型ロボットトイ「ロボパピィ」(2006/06/02) 2006/08/22 00:06 - ページの先頭へ-
|