記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||
|
ロボットが走る、投げる! |
||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||
ROBO-ONE Specialでは、自律走行でのタイムを競う「ROBO-ONE Dash」、自律動作でピンポン球を的に当てる「ROBO-ONE Ball」、回転テーブルや階段、一本橋などの障害物コースを走破するタイムを競う「ROBO-ONE Eagle」の3つの競技が行なわれる。それぞれ別々の競技として分離しているが、多くの参加ロボットが、ROBO-ONE本大会やROBO-ONE J-Classにも参加しているロボットの一部パーツを交換するだけで、複数の競技に参加していた。 ● 自律性能が試される短距離走「Dash」
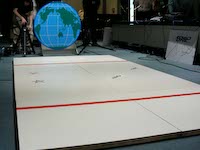
歩行距離は短めだが、競技中は外部からのコントロールは許されず、自律動作でゴールすることが求められる。速く走れることも重要だが、まっすぐ安定して歩けること、そしてそれらの動作を外部コントロールなしで行なう「自律性能」が競われる競技である。 競技はうつぶせ状態、脚をゴール方向に向けた状態から開始される。スタートの合図のあと、ロボットは立ち上がり、旋回をしてからゴールを目指す。競技は2台のロボットが並んで行ない、タイムが速かった方、もしくは走れた距離の長い方が勝ちとなる。ちなみに同時に走行するロボットを妨害するのも自由で、可能ならばROBO-ONE本大会よろしく、相手を殴り倒すことも許されている。 この競技の最大のポイントは、自律動作で行なわれることだ。人間がコントロールすることができないので、すべての必要な動作をロボットにプログラムしておく必要がある。しかし、プログラムだけではこの競技、うまくいかない。 ROBO-ONEに出場するロボットは、足の裏がある程度、滑るようになっている。その状態だと、直線歩行や確実な旋回は難しい。直線に走っているつもりでも、微妙に曲がってしまったり、想定した角度で旋回できなかったりする。 想定していない方向に向いてしまったら、それを修正する必要がある。しかし、そのためには当然、ロボット自身が自分の向いている方向を感知する必要がある。しかし、ホビーロボットにとっては、それが難しいのだ。今回のROBO-ONE Dashでは、ほとんどのロボットが方向を検知する機能を持たず、ただ動作の精度を向上させ、プログラムされた動きでゴールできるように調整していた。
プティは起き上がり前に寝返って方向転換しているが、そのモーションがうまくできていて、ほぼゴールラインに平行に足をそろえて起き上がっている。しかし歩いているうちに方向がずれてしまい、だんだんと左にずれて最後はコースアウトしてしまっている。 一方のレトロは、右にずれる癖があるのだが、何度かの走行でその方向のズレを補正する動きをプログラムに加えることで、コースアウトすることなくゴールすることに成功している。ロボットとコースのくせを見抜き、大会中にプログラムでそれを補正するあたり、さすが大会常連の強豪チームのスギウラファミリーといったところである。
残念ながらPENTOの歩行速度は遅く、もっと素早く歩けるロボット、プティに負けてしまい、競技は3位に終わってしまった。しかし、3回の競技でいずれもコースアウトすることなく、安定してゴールに向かって歩けていたことは、高く評価したい。 大会主催側は、ゴールに青い地球の看板を設置して、「画像処理搭載ロボットの出場を期待します」と述べている。しかし、情報処理に手間がかかるわりには、照明も指定されていない競技場では確実さも望めず、あまり現実的な手法とは思えない。もし画像処理をするとしても、白いフィールドと赤いゴールラインを使う方が簡単そうだ。 その点、PENTOの地磁気センサーは、現実的な手法だと思われる。地磁気はいつでもどこでも利用できる、シンプルな方向検知手段だ。筆者の知る限り、ホビーロボットに使える地磁気センサーはそれほど精度が高くないが、それでもこうした競技では有効な精度が得られるはずだ。 地磁気センサー自体も、昨今はケータイに搭載されるようになったこともあり、小型パッケージ化が進んでいる。たとえばボーダフォンの904SHというケータイに搭載されている、愛知製鋼のセンサーは、小指の爪くらいの大きさのチップで、3軸の地磁気と3軸の加速度を検知できる。ホビーロボットに搭載できるようにモジュール化されれば、方向認識と転倒検知の両方が行なえ、ロボットの自律性能を飛躍的に向上させることだろう。 現在のホビーロボットというと、操縦型が主流だが、ROBO-ONE Dashのようなシンプルだが基本的な自律性能が求められる競技から、自律型ロボットに必要なより高度な技術やパーツがそろっていくのも期待したいところだ。 ● ピンポン球の投擲勝負、「Ball」
この競技では、ROBO-ONE Dash同様にコントロールなしで動作できる安定性や自律性も重要だが、それと同時に勝敗を分けたのは、ピンポン球を安定してキャッチし、それを的に投げる「手」のデザインだ。
また、この競技では、スタート時に手とピンポン球の距離が20cm以上離れていないといけないのだが、大会参加ロボットでも大型の部類に入るヨコヅナグレート不知火は、長い腕を持っているため、そのルールもなんなくクリアしている。 さらに安定した旋回ができているのもポイントだ。2投目ではちょっと旋回角度が足りず、的から少し逸れてしまっていたが、それでも3投目で大会参加ロボット中、唯一の5点部分にピンポン球を命中させることに成功している
PENTOはなぜか、ピンポン球をショベルに載せた後、270度旋回を行なう。旋回距離が大きいので、本来ならば最終角度が大きくずれそうなものであるが、投擲準備段階で、地磁気センサーで方向のズレを検出し、上半身を動かして正確な方向に投擲している。 しかしPENTO、残念ながら手には把持機構がない。手のショベルにピンポン球を入れることに何度も失敗してしまい、制限時間内には1投しか行なえなかった。PENTOにヨコヅナグレート不知火のような手が付いていたら、さぞかし優秀な成績が出せたであろう。次回に非常に期待が持てるロボットだ。 ● ハチャメチャサッカー、「バトルボール」 エキシビジョンとして、4対4でミニサッカーを行なう「ROBO-ONE バトルボール」という競技も開催された。実際にはサッカー、というより「サッカー風競技」といったところで、ボールを手で触ってもOK、いきなり殴り合いを初めてもOKなどと、微妙にハチャメチャなルールとなっている。なお、今回は実験的にエキシビジョンとして開催されたもので、正式競技として行なわれたものではない。第1試合では、青いロボットの「ダイナマイザ-」など強豪ロボットを投入するスギウラチームと、ROBO-ONE Ball優勝の「ヨコヅナグレート不知火」がいるハギワラチームが対戦し、接戦の末、スギウラチームが勝利した。 第2試合では、ROBO-ONE参加ロボット選抜のキワモノチームとスゴイチームが対戦した。いずれもROBO-ONE本大会・J-Classで活躍する強豪ロボットばかりで、こちらも激しい戦いが繰り広げられたが、両チームゴールを決めることはできず、最終的にはPKにより、キワモノチームが勝利した。 いずれも試合の内容は、ハチャメチャな展開になりつつも、かなり面白いものとなった。選抜された強豪ロボット同士の戦いだけに、全ロボット動きがよく、しかし限られたフィールドに8台ものロボットが集うので、常にどこかでロボットの絡み合いがある。ルールが未整備な面が多く見られたが、参加台数やフィールド形状を調整することで、さらに面白い競技に化けそうな可能性を感じさせた。
● 完走者1台のみ! 過酷な障害物競走「Eagle」
水平バーの突破方法としては、両手でぶら下がって下半身を大きく振りながら進む方法などもあったが、ダイナマイザーの行なった方法が、比較的素早く、確実だった印象だ。この水平バーで時間を取られ過ぎたロボットも多かった。 続く障害はターンテーブル。回転するテーブルの上を通って走破する。回転速度は比較的速めで、ここを転倒せずに進めるロボットはなかった。ただし、どちらかというと、ターンテーブル前の、着地地点に置かれたクッションの段差の方も、転倒の原因になっていたようだ。 ここで苦戦したロボットは多かった。一気にターンテーブルに飛び込むことができず、コース外に放り出されるロボットが多く、スムーズに進めるロボットは皆無だった。 続く障害はドアだ。以前は「ROBO-ONE Door」という別競技があったが、ROBO-ONE Eagleではドアノブのない、押すだけで開くドアが使用されている。しかしドアにはスプリングが仕掛けられていて、軽いロボットが突破するにはうまく中央を進むしかない。ROBO-ONE本大会でも優秀な成績を収めている中量級のダイナマイザーは、これをあっさりとクリアしてしまうが、ここで少し手こずる軽量ロボットもあった。 続く障害はL字型の一本橋。幅は200mmで、ダイナマイザーなどのほとんどのロボットは、ここを横歩きで通過する。ここまで到達できたロボットの多くは安定した横歩きが可能で、比較的すんなり突破しているロボットが多かった。
コースをトレースするロボットは、古くから「マイクロマウス」などさまざまな競技会で行なわれている、ホビーロボットとしては比較的、枯れた分野だ。しかしそれは車輪型ロボットでの話。半操縦型とはいえ、センサーとコースの距離が常に変わる歩行ロボットで、コーストレースを行なうというのは、かなりユニークな手法だ。 このほかにも「OnmiZero.2」は手先に水平バーを突破するためのローラーを装備し、水平バーをすんなり突破している。階段では足が斜めになった状態でも突破できるようにプログラムされているなど、かなりROBO-ONE Eagleが研究している様子がうかがえる。今回はターンテーブルとドアに手こずってタイムアップになってしまったが、これだけ研究しているロボットならば、次回は難所対策を施しての登場が期待できるかもしれない。 次の障害は、1段3cmの階段だ。これは以前、ROBO-ONE Stairという別競技で行なわれていたが、今回からは統合されている。 ダイナマイザーはこれも簡単に突破しているが、階段でつまづくロボットも多かった。階段では一歩の幅が大きくなるため、完全な体重移動を伴う、静歩行をするのが一般的だ。そのため一段一段がゆっくりとなる。しかし途中で転倒すると、前の障害の出口からやり直しとなるため、上の方の階段で転倒したロボットは、大きなタイムロスとなっていた。 次の障害はパネル状にデコボコしている悪路だ。高低差は1cmで、一見すると大したことがなさそうだが、実はそうでもなかったようだ。ここまでたどり着けたロボットは、ダイナマイザーのほかにはToin Phoenixの「プティ」だけだったが、プティは段差にはまり、うまくここを通過できずにタイムアップとなってしまった。対するダイナマイザーは、段差の少ない斜めのラインをうまく見切り、そこを一気に突破することに成功している。バランスを崩し、最後にゴール方向で倒れるあたりは偶然っぽくもあるが、偶然だとしても、その運の強さは、さすが歴戦の強者ロボットといったところだ。 最後の障害は段差。ここは悪路から飛び込むように落ちれば良い。ダイナマイザーは悪路からバランスを崩しつつも見事コース内に着地し、そこからダイナマイザー得意の後転置き上がりでゴールを決めている。 以上がROBO-ONE Eagleだ。ROBO-ONE Eagleは今回より、ROBO-ONE DoorとROBO-ONE Stairが統合されたほか、スタート部分のバーが水平になったり、ターンテーブルの速度が上がるなど、難易度が向上している。完走が1台だけだったのは主催者側の狙い通りということだが、それでもちょっと難しすぎたのでは、という印象も受ける。しかし、そんな難易度でも、2回も続けばすぐに競技者のレベルが追いついてしまうのがROBO-ONEの特徴だ。完走者がどれだけ増えるかが楽しみなので、次回も同じ難易度で開催して欲しいところだ。 ● 格闘だけじゃないホビーロボット ホビーロボットの競技会というと、本誌でもROBO-ONEなど格闘大会を扱うことが多いが、ほかのところでは、自律ロボットによるコース周回競争など、非格闘系の競技会の方が一般的だ。ROBO-ONE SpecialはROBO-ONEから派生した競技会だが、むしろホビーロボット競技の原点に回帰した競技とも言える。個人的に面白いと感じたロボットは、ROBO-ONE DashとROBO-ONE BallでのAerobattlerPENTOだ。地磁気センサーを搭載し、自律型でかなり成功を収めていると思う。とくにROBO-ONE Dashは、シンプルなルールだけに、センサー搭載の利点が生かしやすい競技だ。 ROBO-ONEというと、理想とするロボットを登場させるために、ルールをどんどん厳しくしていく傾向が見られる。ROBO-ONE Dashでは、主催者側は画像認識の登場に期待しているが、特定のセンサーを禁止するようなルールは、あまりやって欲しくないというのが個人的な感想だ。その一方で、コースの距離を伸ばしてセンサー搭載ロボットを推奨するルール変更は良いと思う。 また、ROBO-ONE EagleでのOmniZero.2のコース検知センサーも良くできていたと思う。ROBO-ONE Dashなどでホビーロボット向けのセンサー技術が向上すれば、そうしたセンサーを操縦型ロボットにも応用できるだろう。そうしたセンサー技術向上のためにも、ROBO-ONE Specialでは困難すぎず、かつセンサー搭載が推奨されるルールの競技を引き続き実施してもらいたいと感じた。 ROBO-ONE本大会やROBO-ONE J-Classは、ロボットの安定性や機敏さ、操縦者の腕前などが主に競われる。そうした大会の一方で、センサーや自律制御など、ロボットの基礎技術が競われるROBO-ONE Specialも、今後盛り上がっていくことを期待したい。
( 白根雅彦 )
- ページの先頭へ-
|