記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
「あいちロボット技術フェスタ」レポート |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
● 愛知工業大学の20年に及ぶ「鉄人28号」開発プロジェクト まずは、中部地区の大学や企業のロボットたちから紹介する。トップバッターは前述のAIT鉄人4号などを製作した愛知工業大学から。同大学は、横山光輝氏原作の元祖巨大ロボ「鉄人28号」を公式キャラクターとして掲げている。そして、同大学の学生なら学部・学科・学年は問わず誰でも参加できる学生チャレンジプロジェクトとして、2020年までに原作通りの巨大な鉄人28号を製作し、なおかつジェットエンジンで空も飛ばしてしまおうというのが、「鉄人プロジェクト」だ。 今回は、同プロジェクトの正規のナンバーを与えられた「AIT鉄人3号」(2006年発表)、「同4号」(2008年11月発表の最新作)、「同4号Jr.」(2007年発表)を展示(そのほか、愛知万博のキャラクターのモリゾーとキッコロのロボットもデモを行なっていた)。4号は125cm・体重11kgというスペックで、全身に全22個の関節自由度を持つ。原作や近年のリメイク版のでっぷりとして足の短い(失礼)デザインとは異なり、どちらかというとアニメ2作目「太陽の使者 鉄人28号」のスマートな鉄人に近い。実際にデモも行なわれたが、まだモーションが完成していないようだった。なお、コントローラはちゃんと原作に似せて造られており、悪に盗まれてはいけない感が出ている。
同プロジェクトのサポート教員として牽引する同大学電気学科情報通信工学専攻教授の古橋秀夫氏に話を伺ったところ、「本物の鉄人のように足を短くするのは、とても難しいんですよね」という。デザイン的に上半身がかなり重いので、本物そっくりに造るのは大変らしい。ちなみに古橋氏は鉄人28号世代かというと、実は「マジンガーZ」世代とか。 また、今月22日(日)まで中部国際空港セントレアで開催されている開港記念祭2009の「ロボットアカデミー」にも出展している関係で、同プロジェクトのロボットでは身長1.8mと現在最大を誇る「AIT大鉄人」自体は展示されなかったが、画像認識機能を持つその両目(ステレオカメラ)が出展。人の顔を認識するところをデモンストレーションしており、原作にはそうした機能はなかったように思うので、この部分に関してはすでにスペック的に凌駕したというわけだ。 それから、記者がこの日一番に感銘を受けたというか、ツボに来たのが「ジェットエンジンで鉄人を実際に飛ばしてしまう」というところ。予定として掲げているだけかと思われるかも知れないが、実際に研究が進められているのだ。「AITモンスター1号」がその最初の実験機で、身長60cm・体重4kg。バランスを取らせるため、両肩に2軸のサーボを持つが、足は固定(ジェットの熱でサーボが溶けてしまうらしい)。ジェットはケロシン+タービンオイルをメインの燃料とし、始動用にLPGガスを使用。推力は6.3kgで、現在のところ最長飛行時間は数10秒、高度は50cm以上ということである。 ちなみにこの飛行プロジェクトに関して話を聞いてみたところ、コントロールが非常に難しいらしく、現在のところは「どこに飛んでいくかわからない」状況だそうである。ジェットは出力のコントロールが難しく、うまく着地させるのが大変だそうで、ホバリングなどはまだまだということであった。まだ公開できるまでに至っていないということだが、そのうちぜひ飛行実験の様子をお届けしたい。なお、実際の飛行実験は予算的な問題もあるため、現在は開発したフライトシミュレータを用いて、ロボットの飛行シミュレーションとパイロットの操縦訓練をしているそうだ。
● 似顔絵師&レスキュー&赤ちゃんロボットを出展した中京大学 中京大学は3つの研究室が共同で出店した。ロボットアームなどを製作しているユニメックと共同で似顔絵ロボット「PICASSO-2」を出展したのが、同大学の理工学部教授兼同大学院上科学研究科教授の輿水大和(こしみず・ひろやす)氏の研究室だ。PICASSO-2は筆ペンで色紙に似顔絵を描いてくれるというロボットである。似顔絵精製システムの流れは、まず顔を撮影し、その画像から背景を除去し、肌色領域を抽出。瞳と鼻腔の近似円検出をし、顔部品の領域設定を行ない、各部品の検出をする。そして髪とあごの検出を行ない、顔特徴点を抽出して、顔の自動認識が行なわれる。そして、多数の顔データから精製されている平均の顔画像データ(S)と入力された顔画像(P)を比較し、入力された顔の平均と異なる部分を誇張すべきポイント(誇張率b=0.28)とし、似顔絵(Q)が生成されるというわけだ。Q=P+b(P-S)である。 また、似顔絵描画そのものを行なうユニメック製のアームを使用したロボットは、色紙を台に吸着させて反りを矯正したり、筆の移動速度を変化させてにじみやかすれを防止したり、筆圧を弱めて細線で描いたりする仕組みが採り入れられている。というわけで、どれだけ似ているか実際に記者も試してみた。うーん、微妙な結果。もしかして特徴のない顔ということなのだろうか(笑)。
続いては、レスキューロボットを研究開発している清水研究室だ。情報理工学部機械情報工学科准教授の清水優氏の研究室である。 同研究室のレスキューロボットの特徴は、四足歩行型の研究開発も行なっている点だ。清水氏のロボットがロボカップのレスキューロボットリーグに登場するまでは、レスキューロボットの移動システムはクローラ型が常識とされており、「四足歩行ロボットなんかががれきの山を越えられるわけがない」という見方がされていた。しかし、清水氏の四足歩行型が2004年大会で3位(2006年大会も3位)を取って以来、その見方が大きく変わることに。現在は、単純なクローラだけでなく、サーボをかませて多関節型(フリッパーアームタイプ)のクローラにすることで、さらに不整地踏破能力の高さを獲得したものが一般的になっている。 今回は四足歩行型と、フリッパーアームを備えた四脚クローラ型の2タイプを披露してもらった。四脚クローラ型は、単にクローラの地面に対する角度を変えられるというだけでなく、前後方向に揃っていた脚をそれぞれ90度ずつ左右に動かして、左右方向に揃えて、一気に横方向に移動できるようにするという仕組みや、四脚を卍型に展開することで、その場での旋回を容易にするなどの工夫が採り入れられている。レスキューロボットは小さくないとがれきのすき間に入れないが、小さくするとがれきを乗り越えられないというジレンマがあることが難しいと清水氏はいう。「学生たちのアイディアをどんどん採り入れていきます」ということで、今後も柔軟な姿勢でレスキューロボットの研究開発をしていく方針だ。
中京大学3つ目は、ビジネスデザイン研究所の「ifbot」の開発に携わった、同大学で講師を務める工学博士の加納政芳氏の研究室だ。 人とのコミュニケーションができるロボットの研究開発を続けている加納氏の研究室の最新ロボットは、癒し系の「Babyloid」だ。その名前から想像がつくように赤ちゃん型のロボットで、赤ちゃんらしくかわいい声で笑ったりはするが、基本的に何もできず、人の助けが必要というコンセプトだ。高齢者向けに考えられており、Babyloidを介助することで、自分がロボットを生かしてあげているという満足感を得られ、癒しや楽しみ、孤独回避といった精神的な改善を与えることが目的。Babyloidには、カメラ、光センサー、タッチセンサー、加速度センサー、スピーカ、マイクロフォン、口や腕などを動かすモータなどが備えられている。
● みかん&モンスターロボなどを出展した豊橋技術科学大学 豊橋技術科学大学も3つの研究室が共同で出展した。中でも一際目を引いたのが、一見すると「?」という感じのソーシャル・クリーチャ型コミュニケーションロボット「Muu」と、蒲郡みかん型癒し系コミュニケーションロボット「Gamagori Mikan Robot」(以下、みかんロボット)。同大学の知識情報工学系教授である岡田美智男氏の研究室で研究開発されているロボットたちだ。Muuは、大きな1つ目を持ったスライムというデザインで、弱々しい雰囲気が特徴だ。「役に立たないけど、いないと何だか寂しい」という社会的存在としての人工物や仮想生物の研究から生まれたもので、今回は動作はなしだったが、ヨタヨタと移動したりもする。目がちょっと怖い感じもするが、慣れてしまうと子供たちもかわいいと思い遊ぶらしい。関係性発達障害を持つ子供たちとコミュニケーションさせた結果では、積極的な関わりを引き出せるなど、かえって弱々しいところが手をさしのべたくなる気持ちを引き出すそうである。また、Muuは複数台いると、お互いにコミュニケーションを取る仕組みで、幼児はその中に加わってコミュニケーションを楽しんだりもするのだという。 もう1台のみかんロボットは、温泉とマリンリゾートで知られる蒲郡の特産品のみかんをモチーフにしたロボット。蒲郡商工会議所の「癒しとアンチエイジングの郷」推進協議会の会員との雑談の中から生まれたということで、「蒲郡みかん+旅館+おもてなし+和み+癒し+地域ブランド再生+究極のミニマルデザイン」といったキーワードを含むのだそうだ。音声認識に「Julius」を、音声合成に「WizardVoice」を採用し、発話生成は最低限の会話を行なうとしている。また、アイコンタクトは「OpenCV」による顔検出を行ない、ネットワークでみかんロボット同士の状態を共有するといった機能も持つ。蒲郡の温泉旅館の玄関などに置いて、お客さんを和ませたり癒したり、面識のないお客さん同士に会話をさせたりするメディエータを目指しているという。確かに、自宅の玄関に置いておきたくなるようなロボットである。
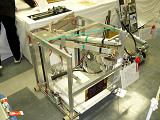
続いて、生産システム工学系教授の寺嶋一彦氏のシステム制御研究室が展示していたのが、「制振・高速搬送を実現するインテリジェントクレーンとハプティックフィードバックジョイスティックを用いた操作支援」だ。 工場などで荷物をクレーンでつるして移動させる場合、どうしてもつるしているロープやワイヤーなどが振り子のように揺れてしまう。それを、あらかじめ荷物の重さやワイヤーなどの長さなどから固有周期を割り出しておき、フィードフォワードで逆の周期を重ねて揺れるのを打ち消してしまうという仕組みだ。それに加えて、さまざまな機械や部品、荷物があり、そして作業者がいる工場でクレーンなどを確実に経路通りに動かしやすくするのが、ハプティックフィードバックジョイスティックというわけである。フォースフィードバックでジョイスティックをコントロールすることで、クレーンを間違った方位に操作しないようにするというわけだ。
最後は、情報学系教授の三浦純氏の行動知能システム学研究室の「付き添いロボット」実現のための各種技術だ。今回は付き添いロボットそのものではなく、移動機構とステレオカメラを展示。ステレオカメラによる画像認識や、移動機構に搭載されたレーザセンサーなどにより、その場で人の認識の様子などのデモを行なっていた。また実験室でのデモ映像では、特定の人物を追跡したり、障害物を把握して移動経路を確認しながら移動したりといった様子が見られた。こうした画像認識などのプログラムは、ソフトウェアプラットフォームの「RTミドルウェア」を利用して開発されており、ソフトウェアのモジュール化と再利用といった部分での研究開発も同時に行なっているという。
● ロボットアームと月・火星探査ローバーなどを研究する愛知工科大 愛知工科大は2つの研究室が出展。1つは、工学部ロボットシステム工学科教授の大西正敏氏の研究室。今回メインに展示していたのは「超多自由度ロボットアーム」。エコ要素を持ったロボットアームである点が特徴だ。通常、3方向に自由に動かしたい時(3自由度)はモータは3個必要だが、それを2個で済ませている。なぜ2個で3軸制御できるかというのは、アクティブユニバーサルジョイントという関節に秘密がある。斜めに接合されているので1関節で2自由度を実現しており、それを2つ接続することで2個のモータで3自由度を実現しているというわけだ。また、モジュラ関節構造なので関節単位での接合と分離が可能という特徴も持つ。そのほか、同研究室では小学生から高校生を対象にした、レゴマインドストームNXTや各種ホビー用二足歩行ロボットを使ったロボット教室なども開いている。もう1つの研究室は、同じく工学部ロボットシステム科教授の中谷一郎氏の研究室。知能ロボット系の研究を行なっているが、月や火星など、地球外の惑星・衛星での探査ロボットの研究も行なっている。今回はそうした探査ロボット=ローバーの1分の1スケールのモックアップが展示してあった。
● 動画像理解技術によるロボットの視覚機能の実現を目指す 中部大学工学部情報工学科准教授の藤吉弘恒氏の研究室で行なっているのが、ロボットの視覚機能だ。今回は、リアルタイムでの人とその移動方向の検出と、交通道路標識の認識のデモを行なっていた。人と移動方向の検出のデモは、カメラに映し出された人物の動きが、画面左側に移動する場合は青、右は黄、上は緑、下は赤というぐあいに軌跡が色で表されるというもの。動いている人は虹色の鮮やかなオーラをまとっているように見えるのが美しいデモだ。アピアランス特徴と時空間特徴の共起を用いた人検出技術や、Space-Time Patchを用いて物体の移動後方識別とセグメンテーションを同時に行なう技術などを組み合わせた技術である。人の歩行は上下動も含まれるし、あっちこっちを見ながら移動するなど複雑な動きをすることから、4方向の色が混ざり合ってとてもきれいな色になるというわけだ。 もう1つのデモは、クルマの自動運転技術やドライバーのサポートを目的にデンソーとの共同研究も行なわれている画像認識技術(「人とくるまのテクノロジー展2008」のレポート記事でも紹介)。今回は鉄道模型を用いて車両にカメラを備え付け、線路脇に道路標識やコンビニのロゴなどを設置し、鉄道模型がそれを認識し、必要なら標識の指示に従って運転するという内容だった。一見、あらかじめプログラムされているように見えてしまうが、どこに標識を移動させてもちゃんとカメラの映像から瞬時に標識を認識し、例え逆さまになっていてもちゃんと認識できるという精度の高さが特徴だ。かなり実用化が近いと思われ、デンソーがトヨタ系であることから、次の「クラウン」などの高級車に搭載されるようなことがあるかもしれない(クラウンは昨年モデルチェンジしたばかりなので、新型はまだ数年先になるが、かなりロボット化が進んでいる1台である)。
● 大同大学とコンビを組んで出展したユニメック 続いては、企業系の面白かったロボットたちを紹介しよう。中京大学輿水研究室の似顔絵ロボットでも協力していたユニメックも独自でブースを構え、いくつかのロボットを出展していた。大同工業大学工学部ロボティクス科講師の工学博士・橋口宏衛氏とも共同研究を行なっており、今回は橋口氏のロボットも複数展示されていた。橋口氏の魅力は、「普通にやったのでは面白くないですから」と創意工夫を重ね、人とは違うことにチャレンジしないと気が済まないというところ。創るものみな、人とは同じことをしたくないというところからスタートしており、その1つが自律移動ロボットコンテストの「つくばチャレンジ」で、唯一のバイク型(完全2輪ではなく、補助輪がついてはいる)として出走したロボットだ。さすがに屋内での運転は無理なため、ハンドルを動かすところぐらいしか見られなかったが、クルマの自動運転はかなり研究が進んでいるとはいえ、あまりバイクに関しては聞かないので、目の付け所が面白い。同じ自律移動系ロボットとしては、毎夏に琵琶湖で行なわれている「びわ湖クルーレス・ソーラーボート大会」に出場しているソーラーボートも展示されていた。
そのほか、名古屋で開催されている「国際マイクロロボットメイズコンテスト」に出場しているロボットも展示。これは、ソニー・PlayStation Portable(PSP)をコントローラとして使用し、Bluetoothを使ってロボットを操作するというものだ。「ロボットのすぐそばで赤外線コントローラをくっつくように近づけて操作するのはいやだったので、客席から優雅にやろうと思いました(笑)」という。
また、ユニメックが商品化しているロボットも橋口氏の影響があるのか、ちょっと操作系が変わっている。ネットワーク回線で遠隔操作が可能な「無線移動台車ユニット」だ。移動広告などに使えるが、今回は音楽演奏機能を載せて、ジュークボックス型ロボットとしてデモを行なっていた。何が変わっているのかというと、操作にはWiiリモコンが使えるのだ。Wiiリモコンの十字キーでも操作できるが、傾けたり、回したりして操作できる仕組みで、ロボットを設置する際に仕事をしているようには見えないのがなんとも面白い1台である(笑)。
● 人命救助ロボットを開発したプロジェクト・アイ 災害医療機器開発を中心にしたものづくりを行なっているプロジェクト・アイは、車体内に人間1人を収納し、災害現場から救助活動を行なう、自走式双帯対抗クローラ型「人命救助ロボット」を開発したベンチャー企業だ。ただし、非常に大型のため、今回はその小型モデルを展示していた。この小型モデルに関しても、将来的には独自に災害現場での要救助者探索用の小型レスキューロボットとして開発を進めていくという。なお、今回は年頭に横浜市の開港150周年イベントの一環で、同市消防局のイベントで初めて一般に披露された時の様子を写した画像をいただくことができた。特徴は、独立したクローラが上下に2つ並んでいること(それが左右にあるので、計4つのクローラを有する)。1つのクローラの場合、がれきが折り重なった狭い空間で天井方向でクローラが接してしまうと後進する駆動力がかかってしまうため、それ以上前進できないという欠点がある。しかし、クローラを上にも備え、上のクローラは下のクローラとは逆回転させることで、天井方向で接しても地面側ともに前進する駆動力のみが生まれ、がれきをかき分けて進んでいけるというわけだ。また、帰路の確保と狭窄空間の拡張のため、ジャッキ機構も備えている。 そしてもう1つの特徴は、一般的なレスキューロボットががれきに埋もれている被災者を捜し出し、救助そのものはレスキュー隊員が行なうスタイルなのに対し、本体内に被災者を収納して直接救助できることである。身長190cm、体重110kgクラスの人手も収納できるそうだ。また、ただがれきの下から被災者を救助するだけでなく、クラッシュ・シンドローム(がれきなどの重量物の圧迫を長時間受けた後に、圧迫を開放することで生じてしまう症状で、最悪の場合は死につながる)への対応も取られている点も大きな特徴だ。被災者をがれきから解放すると同時に、カフ内に包み込んで再度人工的に圧迫をかけてクラッシュ・シンドロームの発生を防ぎ、そのまま車内に収容して救助するという仕組みだ。そのほか、赤外線カメラで状況確認と血流測定を行ない、マイク/スピーカで被災者の意識の有無(発話の可・不可)や心音の確認なども行なえる仕組みで、治療の前のトリアージ(多数の傷病者がいる場合、重傷度と緊急性を分別する作業)も行なえる。
● ロボスプリントやPC-BOTを発売しているスマッツ 中部地区のマイクロマウス大会などで併催されている、ロボット版ドラッグレース的な雰囲気のクルマ型ロボット競技「ロボスプリント」。入門者向けロボット競技として、学習教材にも適した価格(3,990円)の「ロボスプリントキット」を発売しているのが、スマッツだ。同社のブースでは、PCベースのオープン構造のR2-D2系のロボット「914 PC-BOT」や、オリジナルのヒューマノイドロボットの顔や脚部なども展示していた。画像認識用のステレオカメラも搭載されている顔は、あちこちに顔を向けたり、口を動かしたりと、デモも行なっていた。
● 床下点検や探索用のクローラ型ロボットを展示したトピー工業 首都圏の各種展示会にも出展しているトピー工業は、動作デモはなかったが、3タイプのクローラ型ロボットを展示した。1台目は、全長38cm・重量6kgという小型・軽量の床下点検ロボット「エニーS90」。最大乗り越え段差84.5mm、最大走行速度1km/hで、可動範囲の広いカメラユニットが特徴だ。カメラユニットは、光学26倍ズーム、画角最大42度、パン(水平可動)340度、チルト(垂直可動)90度、赤外線照射機能など、非常に広い範囲を見渡せるのがポイントとなっている。 2台目は、フリッパーアームを備えたクローラを有する「S-92」。フリッパーアームを展開すると67cmほどで、重量は12kgだ。最大乗り越え段差150mm、最大走行速度0.7km/h。階段も登坂可能で最大昇降角度は45度となっている。 3台目はまだ新型で開発中の「エニーライトS-90」。エニーS90の低価格版ということで、カメラなどに価格を抑えた製品を使用している模様だ。また、そのカメラは防護用のドーム内に入れられている。クローラは、エニーS-90と同タイプのものを採用。同社オリジナルのクローラは、ラグ(クローラのでっぱり)に工夫が成されており、従来よりもクローラ半径の30%高い位置でラグを段差に引っかけることができるのが特徴だ。そのため、よりクッション性が高く高速走行に適し、走行振動が抑えられている。
● パラドックスベアリングを用いた災害対策や電脳メガネを研究開発中 インパクトのある社名のエッチャンデスは、同社が独自に開発した球面軸受構造を有する3自由度回転システム「パラドックスベアリング」を用いた、防災システムや電気自動車用充電システム、代読サービス向け電脳メガネなどを紹介していた。防災システムへの活用では、パラドックスベアリングにアクチュエータを接続することで、点検・監視用の光軸可変カメラの動作や、煙が充満していたり、停電で明かりがなかったりする、人の目が役に立たない状況での脱出ルートを指示するためのハプティック(触力覚)インターフェイスなどに利用できるとしている。 また、電気自動車や点検用ロボットに関しても、同様に充電システム周りで使えるという。コンセントとプラグの軸が多少ずれていても、お互いのパラドックスベアリングが角度を調節することで連結を容易に行なえるというわけだ。 代読サービス向けの電脳メガネや人工眼球用途としても考えられている。頭部や身体全体を激しく動かしても、それほどぶれない視界を得られるように、人の目はとても振動に強い。それは実際に眼球が細かく動いているからで、それをパラドックスベアリングとアクチュエータで再現しようというわけだ。これにイメージセンサーや、モザイキング技術などを組み合わせることで、スキャニングをぶれずに確実に行ない、新聞や雑誌などの代読を容易にするとしている。
● 自律走行用電気自動車を出展したキャリオ技研 空飛ぶ自動車「ADAM」の研究開発でも知られるキャリオ技研が出展したのは、ゴーカートサイズの試作電気自動車や小型バギータイプの電気自動車など。試作電気自動車「EVe」は子供が乗るゴーカートサイズだが、ライントレース機能も搭載しており、自律走行も可能な1台。しかも家庭用100V電源から充電可能だ。将来的には宅配、店舗でのカートの搬送、ゴミ収集、ポーターといった屋内外での使用から、免許不要の自律走行、そして交通事故ゼロを目指すとしている。そのほか、バギータイプの電気自動車「EVe2」(自律走行機能はなし)、災害時に上空から現場の様子を撮影することを目的とした無人電気グライダーなども出展していた。
● 高校生から高等専門学校生を対象にしたロボットコンテスト 同フェスタ内で、県内の高校生、専門学校生および高等専門学校生を対象に、生活支援やコミュニケーションなどのサービスロボット分野を焦点にしたコンテストも実施された。昨年の9月1日から12月10日まで期間が設けられ、高校が15校、専門学校が2校、高等専門学校1校の計18校から28作品の応募があった。単にロボットを造って出展するだけでなく、当日は会場の一部を使ってプレゼンテーションとロボットの実演も行なわれた。新規性・アイディア度、信頼性・ロボット技術の導入度・完成度、ロボット作動の円滑度、創造性・ロボット技術の理解度を中心に審査されている。愛知県知事賞グランプリを獲得したのは、名古屋工学院専門学校・高等課程(=高校)のメカトロニクス部「TEAM AQUA」によるホビーサイズのヒューマノイド型ロボットの「AQUA」。高校でのものづくりは思い出作りと考え、生体模倣を利用してフレームの設計やデザイン、製作、プロモーションなどを3名の生徒が自作したというロボットだ。名前は、そのボディの青さから、地球の青さを含め、生徒たちが将来蒼く澄み切った技術者になってほしいという顧問の先生が、宝石のアクアマリン(AQUAMARINE)から取ったのだそうだ。 ちなみに、兄弟機ともいえる同じメカトロニクス部「TEAM AQUA」の別メンバー3名が造った「AQUA_0」(アクア・ゼロ)は、後援団体による特別賞の1つの財団法人あいち産業振興機構理事長賞を受賞している。その他は以下の通りだ。カギカッコ内がロボット名、カッコ内が校名とチーム名となっている(チーム名はない場合もある)。 【愛知県知事賞準グランプリ】 「サッカーロボット」(豊田工業高等専門学校/KIKS) 【愛知県知事賞優秀賞】 「evoRYU」(豊田工業高等専門学校/豊田高専B) 「花ちゃん華激団」(名城大学附属高等学校/名城メカトロ部) 【愛知県教育委員会賞】 「ボイコン」(愛知県立愛知工業高等学校/愛工電研) 【財団法人人工知能研究振興財団理事長賞】 「小烏丸」(愛知県立小牧工業高等学校) 【財団法人あいち産業振興機構理事長賞】 「AQUA_0」名古屋工学院専門学校・高等課程/メカトロニクス部「TEAM AQUA」) 【財団法人科学技術交流財団会長賞】 「JEM2号」(名古屋工業高等学校) 【名古屋商工会議所会頭賞】 「Bearish」(愛知県立起工業高等学校/Bearish)
● 大同工業大主催ロボットバトル 複数の来場者参加や観戦可能な催し物が行なわれたが、ロボットバトルは大同工業大の主催で実施された。大同工大といえば、中京圏や関西圏のロボットバトルでも活躍しているダイガック(アキツカさん)や、アシュラ(みんなのやすさん)らが所属する(みんなのやすさんは既にOBだが)ロボット研究部を擁する大学だ。今回は重量制限などはなく、オープンクラスでのバトルとなり、25台が参加。ハーデス(まつしろさん)vsBBR-6(チャーリーさん)の決勝戦、ヴァイパー09(かろとさん)vs桃太郎(BBR-6のチャーリーさんの製作で、若干4歳の息子さんが操縦していたが、熱を出して急遽別の方に交代)の3位決定戦をお届けする。優勝はBBR-6、準優勝はハーデス、3位はヴァイパー09、4位桃太郎となった。また、最後に行なわれたランブルは、トーナメント準優勝のハーデスが制している。
あいちロボット技術フェスタは、大学の先端技術や企業の最新製品もあれば、高校生たち将来を担う若者たちの創造系コンテスト、ロボットバトルもあり、まさにロボットのてんこ盛りという感じであった。首都圏の展示会や技術系の発表会などではなかなか見られない技術や製品も多数あり、実に楽しめた。愛知工業大学の鉄人プロジェクトなど、その進捗ぶりを追いかけたいものも多数あったので、みなさんもぜひ中部地区のロボットに注目していただきたいと思う。 ■URL 愛知県 http://www.pref.aichi.jp/ ニュースリリース http://www.pref.aichi.jp/0000022406.html
( デイビー日高 )
- ページの先頭へ-
|