記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
レスキューロボットのため画像システムとは? |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
先日の土井氏の講演に続き、本稿では、第四回竸基弘賞の竸基弘賞学術業績賞を受賞した山下淳氏の「災害時劣悪視野の明瞭化に関する研究」についてレポートする。
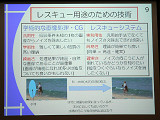
● 災害時劣悪視野の明瞭化に関する研究
レスキューロボットには、周囲の情報を収集するためにカメラが搭載されていることが多い。オペレータが安全な遠隔地にいてロボットから送られてくる映像を見て操縦したり、人が侵入できないガレキの中をロボットが自律で周囲の状況を判断して移動したりする。そのためには、ロボットがカメラで撮影した映像は重要な情報となるからだ。 しかしながら、その映像は必ずしも鮮明な画像とは限らない。レスキューロボットが活動する現場は、粉塵が舞う被災地であり、また雨天や降雪など悪天候での活動も想定される。カメラのレンズに水滴や泥ハネが付着すれば、視界が遮られてしまう。 自律ロボットのレンズに泥や水滴がついていれば、ロボットが自律的に周囲の状況を判断して動き回ることが困難となるのは想像に難くない。また、オペレータが遠隔操縦する場合でも、視界が悪ければ重要な情報を見落とすこともありうるし、常にノイズの向こう側に何があるのかを推測しながら操縦するのは疲労感が大きいだろうと、山下氏は指摘する。 これを画像処理技術で解決しようというのが、山下氏の研究テーマだ。
また、仮にワイパーを搭載した場合、ワイパーが汚れを除くために動いた瞬間はワイパーが視野を遮るノイズになるという新たな問題が発生する。 他には、車のフロントガラスに特殊なオイルを塗布し、走行スピードで水滴が次々流れていくというアイデアもある。しかし、これも完全な除去は困難である。というのは、台風中継などの時、カメラについた水滴が映像を見えづらくしていることからも推測できる。山下氏のアプローチは、こうしたハードウェア的な発想に対して、ソフトウェア的な手法をとっている。
例えば、雪や雨が降っている風景を撮影した例では、画像処理技術で雪や雨をノイズとして削除するという研究がある。これは、雨や雪は天から降り注いでいるという情報を前提条件としている。つまり基本的に静止しているものや横移動しているものはノイズではない。上から下に降りてくるものをノイズとコンピュータは判断しているのだ。この考えを元にして、雪や雨を自動的に消してきれいな映像を作ることができる。 しかしこれに関しては、カメラの保護ガラスに付着したノイズには対応できないという問題点がある。上記技術では、背景もノイズも動かない場合は、ノイズを特定することができず処理が不可能なためだ。
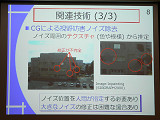
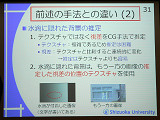
しかし、この研究は周囲の情報のみで色データを無理矢理推定しているため、修正が不完全であることと、ノイズ位置をオペレータが指定しなければならないという問題があるという。 山下氏は「レスキューロボットおよびシステムの場合、オペレータがノイズ位置を指定してから消すのは実用的ではない。学術的な画像処理やCG技術では、レスキューに使う技術とは相容れない問題がある」という。 従来の画像処理やCG研究では、汎用性が重要視されている。既に、映像としての美しさを求め1枚の画像からノイズを除去するというのは高いレベルで実現可能になっているという。しかし、レスキューシステムで使用する画像処理は、難しいことをする必要はなく簡易性が重用視される。簡易というのは理論が簡単で、計算スピードも速く確実ということに繋がる。 「もう1つ忘れてはならないことは、従来の画像処理・CGでは、画像がきれいであれば事実と違う情報が含まれていてもよいというスタンスの研究になっている」と山下氏は指摘する。 例として、水辺に立つ女性の映像を一部塗りつぶし、水滴で見えないという状況を作りテストしたものを示した。この水滴を消すと、影になっていた波が自然な形で再現されて非常にきれいな映像に仕上がっている。しかし、山下氏は「レスキュー用途では、きれいか否かはさほど問題ではなく、それよりも確実な情報が必要である。要は、ノイズの向こう側に倒れている人がいるのかいないのか、必要な情報はその点にある」と強調する。 実際、この画像は水滴の下には男性が隠れていた。それがCGなどの最新技術では、その存在を消して、背景の波をいかにきれいに再現するかということを目指した結果となってしまうのだ。
つまり、「嘘の情報を得るくらいなら、ノイズがある方がまし。レスキューシステムで実用化する技術は、そういうスタンスでなければならない」ということで、山下氏が目指しているのは「嘘をつかないテクニック」の開発だという。 具体的な手法としては、画像処理の技術を用い、複数の汎用的ではない方法を提案して、状況によって使い分けて対応することになるそうだ。その時に重要視しているのは、それぞれの方法は嘘をつかない確実な方法で、かつなるべく単純に行なうという方針だという。 画像処理では、画像データの情報を有効に利用し、画像の変形・変換、特徴の抽出・分類・符号化、発生などの処理を行なう。例えば、ページを開いた本を撮影して、ページが弓形に湾曲していた場合、画像処理の技術で曲がった映像を引き延ばして真っ直ぐにする。あるいは、何かの粒子がたくさんはいった映像を、人間が数えるのは面倒だからコンピュータに自動的にカウントさせるというのが、画像処理の基本イメージだ。 2番目の技術として、三角測量を使っている。人は右目と左目で違う情報を得ている。試しに、顔の正面に真っ直ぐに手を伸ばして指を立て、右目だけで指を見たときと、左目だけで見た時を比べると、指は動かしていないのに指の位置が違って見える。これを「視差」という。この左右の目の見え方の違いを利用し、対象物までの距離を測ることができるのだ。 コンピュータでも同様に、左右に配置したカメラでルービックキューブを見ると、左カメラで見た画像では、画面の右側にキューブの角があり、右カメラで見た画像では画面の左側に見えるというように視差が生じる。この視差を利用して、対象物までの距離を求め、対象物がどのあたりにあるかという情報を求めることができる。このようにカメラを2台以上使って、対象物までの距離を測る技術を「ステレオ計測」という。
もう1つ、コンピュータを使って図形・画像・アニメーションを作成するCGの技術も使っている。 CGのテクニックでよく使われているのは画像合成技術で、ハリウッド映画などでもスタジオの中で撮影した画像と別の風景画像を合成したり、2枚の顔写真を元に、自動的に計算して3Dのようにどの角度からでも見えるようにしたりできる。
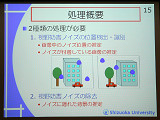
山下氏は、こうした画像処理と視差を使った三角測量と、CGの技術を使い、カメラレンズについたノイズを消す研究をしているわけだ。提案手法の原理は、基本的には非常に簡単な内容だという。複数枚の同一場面の情報を融合すれば、鮮明な画像ができるという考え方をしているそうだ。 例えば、3台のカメラが同じ物を撮影し、それぞれ1枚ずつ計3枚の画像を撮ったとする。楽観的に考えれば、各カメラについている水滴の場所は違うだろう。つまり3枚の画像情報を合成すれば、きれいな画像が完成する。この手法では、水滴の向こうに隠れているものを推測しているわけではなく、実際にあるものを表示できる。というのが、基本的アイデアである。 しかし、カメラが1台しかないという状況も当然想定される。その場合は、カメラが動いて2枚以上の画像を撮って、その画像を合成してきれいな1枚の画像を作るということを行なっている。 人間も目の前に障害物があれば、顔の位置を上下左右に動かして対象物を見ようとする。それと同じ原理で、1台のカメラしかない場合は、積極的にカメラを動かして、向こうにあるものをきちんと確かめて鮮明な画像を作るわけだ。 こうした処理のためには、2種類の技術が必要である。1つ目は、どのカメラのどの位置にノイズが付着しているのか確定すること。例えば、2枚の画像を撮影した時に、それぞれ水滴が付着している場合、人間が見ればどこが水滴かすぐ判断できる。それをコンピュータにどのように分からせるか。2枚の画像データを比較し同じ部分はOKと判断しても、違っている場所は水滴があるかもしれない。どちらの画像が正解なのかを知る必要がある。2つ目は、正しいデータと判断した映像を合成し、1枚の映像とする技術を開発する必要がある。
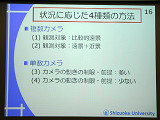
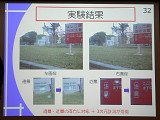
山下氏は、その問題点解決に対し、状況に応じた4種類の方法を提案している。4種類というのは、まずカメラが複数ある場合と、1台しかない場合という条件による分類。次に複数カメラ搭載時に、対象物までの距離が遠い場合と近い場合。単体カメラの場合に、カメラの動きの制限や前提条件が多い時と少ない時。こうした状況にあわせて分類している。 複数のカメラを使い、対象物が比較的遠くにある場合は、差分処理ベースの方法で処理するという。例えば、3枚の画像を撮影した時に水滴の位置を知りたければ、画像1と画像2を比較し、色の差などが大きいところにはきっと水滴がついていて、差が小さければ水滴はないと判断できる。この方法で、2枚の写真から【写真1】のようにきれいな画像を作ることができる。
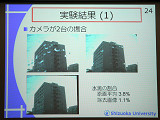
またレンズにたくさんの水滴がついていても、3台のカメラがあれば【写真2】くらいにきれいな映像を作ることが可能となったという。他にも水滴以外のノイズ、例えばワイパーを使っている時に、画面に映り込んだワイパーを消すこともできる。 複数カメラが搭載されていれば、左右カメラが撮影した映像の視差を利用して対象物までの距離を測ることができるので、遠景と近景では画像処理の方法を変えているそうだ。それにより水滴で遠くのポスターの文字や、近くの看板の文字が見づらくなっていても、再生できる技術を完成している。
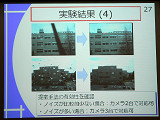
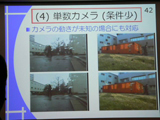
単体カメラの場合は、土台を固定して首を振るカメラを想定している。山下氏はカメラが首を振る前の画像と振った後の画像を示し、風景が変わっても画面の同じところに水滴があることを示した。この中から水滴をきれいにするわけだが、画像内に移動中の人がいると非常に処理が難しいという。レンズに付着したノイズの画像内の移動距離は、計算で求めることができる。値が合わない移動物体があればノイズではないと判断し、人物など必要な情報は残したまま、ノイズだけを除去することも可能とした。
最初に述べたように、山下氏が研究している手法の特長は、人が指示を与えなくても画像をコンピュータに取り込んだらその瞬間に自動的に判断して処理をし、鮮明な画像を表示する技術だという点にある。静止画だけでなく動画でも利用可能で、視野を妨害するノイズが動いていても止まっていても消すことができる。
技術の応用としては、全天候型の監視カメラへの導入が考えられるという。既に、街中の重要な地点や危険地点には、監視カメラが配置されている。しかし、雨の日は鮮明な映像が取れないというのが大きな問題になっている。そうした現在のインフラに、この技術を入れて世の中に寄与していきたい、と山下氏は考えている。 山下氏は「将来、自動車のフロントガラスが大きなディスプレイになった時、この技術を使えば、雨の日でも晴れているような画像を見ながら車を運転することができるかもしれない」と夢を語った。
■URL レスキューシステム研究機構(IRS) http://www.rescuesystem.org/ 山下淳公式サイト http://sensor.eng.shizuoka.ac.jp/~yamasita/index-j.html ■ 関連記事 ・ 「第四回竸基弘賞 竸基弘賞技術業績賞講演」レポート ~レスキューロボット技術のシロアリ防除ロボットへの応用(2009/02/04)
( 三月兎 )
- ページの先頭へ-
|