記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
「第29回全日本マイクロマウス大会」マイクロクリッパー競技レポート |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
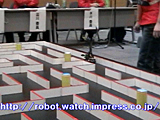
「第29回全日本マイクロマウス大会」では、迷路を探索してタイムを競う「マイクロマウス競技」、来年より正式競技となる「ハーフサイズマウス競技」、ラインに沿って走行しタイムを競う「ロボトレース競技」、ロボットが迷路を探索しながら迷路内に置かれている円筒を上下反転してポイントを競う「マイクロクリッパー競技」が実施された。 マイクロマウス競技、ハーフサイズマウス競技、ロボトレース競技については、既にレポートした。本稿では「マイクロクリッパー競技」のレポートを送る。 ● 面白さがわかりやすいマイクロクリッパー競技 マイクロクリッパー競技は、アーム機構を搭載した自律ロボットが、迷路内を走行しながら置いてある円筒を発見して、その円筒を反転させる競技。この競技に出場するロボットを、「マイクロクリッパー」と呼ぶ。 迷路内にある全ての円筒を反転し、スタート地点へ戻ってくるまでのタイムを競う。制限時間7分以内に5回の走行ができる。時間内に全てを反転できなかった場合は、反転した円筒の個数が成績となる。円筒を倒したり、反転した円筒を元に戻した場合はポイントとならない。
マイクロクリッパーの面白さはいくつもあるが、その中の1つとして「観客にわかりやすい」というのも上げられるだろう。 マイクロマウス競技では、スタートからゴールまで最短経路を探索する知能と、最速スピードで駆け抜ける時の制御を競う。ロボトレースもラインを記憶して走るスピード競技だ。どちらも、トップクラスのスピードには毎年驚かされるし、見ているだけで興奮する。しかし、一般の観客が見学する時に、面白さの本質が伝わりにくいのは否めない。ロボットに対して興味と知識があれば、それぞれの機体の構造や制御方法に関心をもって見ることができるが、なかなかそこまで見ることができる人はいないだろう。スピード感は相対的なものだから、最速ロボットを見てしまえば、他のロボットは遅く感じてしまう。それなりの予備知識がないと、興味を持って見続けるのは難しいのだ。 その点、マイクロクリッパーは「円筒を反転しながら移動する」のが、見た目にわかりやすい。反転する機構はさまざまな工夫があるし、一度、反転した円筒を再反転してしまったり、円筒を倒してしまったりすることもある。ロボットが円筒を持つたびに上手に返せるのかハラハラしながら見守ってしまうのだ。ロボットに感情移入しやすいため、子どもにも人気ある競技だ。 以前は、「ちゃんと返せるかな?」というハラハラ感が一番の見どころだった感があるが、今大会では審査委員から「不安定なロボットがいない」というコメントがでたように、競技全体のレベルがアップした。この1~2年で、自分が反転した円筒を記憶しているマイクロクリッパーが増えたなぁと思っていると、再スタートした時にそれまでのデータを初期化してしまうのか、再反転してしまったりもしたが、“ロボットの賢さ”が目で見てわかりやすいのが面白い。
もちろん、ロボット好きにはいくつもの見どころがある。マイクロクリッパーは、通路上にある円筒を上下反転し走行の邪魔にならないように後方や横方向に置いて迷路内を移動する。つまり、競技中に円筒の位置は常に変わり、迷路も変化を続ける。前述のように、一度反転した円筒を再反転した場合はポイントとならないので、自分が反転させた円筒を記憶しておく必要もある。刻々と変化する環境に適応しながら、ミッション完遂に向けて動き続ける高い自律性が求められているのだ。 独自性の高い機構を搭載したロボットが多いため、参加者のアイデアやアルゴリズムがロボットの動きから見えてきて、とても興味深い。反転機構が必要になるため機体が大きく、スピード最優先になっていないのでロボットの動きもゆっくりだ。だから、ロボットをじっくり観察できるのも嬉しい点だ。
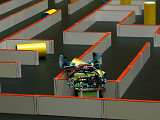
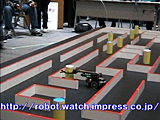
● 2台のマイクロクリッパーが課題を達成! いよいよタイム競争に突入 今大会は、持ち時間が昨年までの10分から7分に短縮された。ただし、前回30個配置されていた円筒が23個に減っているため、一概に難易度が上がったとは判断できない。ちなみに円筒の数はルールで決定されていない。過去の大会では最高43個の円筒が置かれたこともあったのだ。誤解されることが多いが、マイクロクリッパー競技では“反転した円筒の数”ではなく、“全て反転してスタート地点に戻るタイム”を競うのが本来の趣旨だ。しかし、競技自体が難しいため課題が達成されることは少なく、これまでは反転した円筒の数で順位を決めることが多かった。 しかし今年は大会史上初、2台のマイクロクリッパーが全数を反転してスタート地点へ戻り、タイムによって優勝が決定した。ちなみに、昨年優勝の大島章氏はわずかに時間が足りずスタート地点にたどり着けなかった。過去の大会では、2006年に優勝したシンガポールの参加者がミッションをコンプリートした例があるだけだ。 優勝した「舞風弐式(寺田篤氏:東京農工大学ロボット研究会RUR)」は、4分32秒52というみごとな成績で全ての円筒を反転してスタート地点へ戻ってきた。反転するアームに「後方に返す」と「その場で反転する」の2種類の動きがある。既に通過したところに円筒を置いたり、壁の向こうにある時はその場反転と、状況に応じて使い分けていた。 その場反転する時に、円筒を持ち上げつつアームをひねって反転する時の動きがスムーズで素早い。他のマイクロクリッパーを見ていると、反転した円筒からアームを離した時に円筒がフラフラとすることが多いが、「舞風弐式」は安心して見ていられた。競技後に「舞風弐式」の動きを間近で見せてもらうと、円筒を離す時に一気にアームを開くのではなく、少し開いて円筒が安定するのを待ってから離していた。 円筒を置く時に通路のセンターに正確に置かないと、後からその円筒を移動したい時に上手く掴めないことがある。そうしたエラーを防ぐためにも機体の姿勢制御が重要になるが、「舞風弐式」は走行中に壁の切れ目で前後センターを確認するなどの工夫をしているそうだ。 寺田氏は、マイクロクリッパーに挑戦して4年目になるという。大学1年の時に初参加して、特別賞を受賞。その後、改良を重ねて今大会の優勝につなげた。今年の機体は、去年のマイクロクリッパーとサイズは同じだが回路とプログラムは新しくしたという。昨年より移動スピードをアップするために、迷路探索のアルゴリズムを見直し走行しながら探索できるようブラッシュアップしたという。
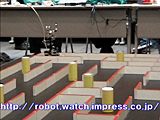
「Lucky(Ellyana Tan氏:Nanyang Polytechnic)」は動きがシャープだった。移動が速く、きびきびと止まる気持ちのいい動きだ。動画を見るとわかるが、曲がり角をスラロームで走行している。未探索の迷路走行にスラロームを取り入れるのは、マイクロマウス競技でもチャレンジしている人は少ない。レベルの高い制御だ。安定した動きで次々と円筒を返していったが、22個目を反転した後に、迷路中央へ向かわずUターンしてしまった。その後、最後の円筒を見つけるまで2分近くにわたって迷路内を動き回ったロス時間がもったいなかった。
マイクロクリッパーは1992年に第1回目が行なわれた。今年で15回目を迎え、ロボット競技としては歴史ある種目だ。にもかかわらず、参加台数はさほど多くない。今年もエントリー台数は18台、そのうち日本国内からの参加は10台だ。いささか寂しい気もするが、同日開催のマイクロマウス競技に喰われて、歴史が長いわりに競技の知名度が低いことも理由かもしれない。 まだ完成された機構やアルゴリズムがないマイクロクリッパー競技は、独自のアイデアを考えるのが好きな人にとって魅力ある競技だと思う。今大会では、優勝した「舞風弐式」よりも「Lucky」の方が移動スピードは速いように思う。しかし反転機構の工夫と制御、迷路探索のロジック、反転する円筒を進行の妨げにならないよう処理するなど総合力で「舞風弐式」が優れていた。 これからもっと参加者が増えれば、面白い機体やアルゴリズムで競技がますます盛り上がるだろう。今大会優勝の寺田氏も、まだ搭載していないアイデアがあるとコメントしていた。賢くなる余地がたくさん残されているマイクロクリッパー競技に、来年どんなロボットが登場してくるのか大いに期待したい。 ■URL ニューテクノロジー振興財団 http://www.robomedia.org/index.html ■ 関連記事 ・ 「第29回全日本マイクロマウス大会」ロボトレース競技レポート ~新ルールで難易度アップ! 過去最長コースにリタイヤも続出(2008/12/18) ・ 第29回全日本マイクロマウス大会「ハーフサイズマウスプレ競技会」レポート ~15台がエントリー、決勝は32×32の巨大迷路に4台のマウスが挑戦(2008/12/15) ・ 「第29回全日本マイクロマウス大会」エキスパートクラスレポート ~自立型知能ロボットが1/1,000秒を競って迷路を駆け抜ける(2008/12/11) ・ 「第28回全日本マイクロマウス大会」レポート(2) ~マイクロクリッパー競技・ロボトレース競技編(2007/12/17)
( 三月兎 )
- ページの先頭へ-
|