記事検索 |
最新ニュース |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
「第2回自律ビーチフラッグ競技会」開催 |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
ROBO-ONEや各種二足歩行ロボットの競技会では、これまであまり見られなかった参加ロボットがすべて自律制御されているこのビーチフラッグ競技。解説者から「ロボットにも血液型があるのでは?」との発言が飛び出すくらい、どのロボットも同じ機体とは思えないような個性豊かな動作でフラッグへ向かっていった。
● ビーチフラッグ競技とは? このビーチフラッグ競技会、2体のロボットがサッカーフィールドの両サイドにうつ伏せの状態で配置され、スタートのスイッチを押した後は完全自律で、フィールド中央に立てられたフラッグを倒すまでのタイムを競うものである。フラッグはちょうどKHRシリーズよりちょっと背の高い46cmで、直径7.4cmの円柱形。赤色をしており、また40kHzの超音波発信器が埋め込まれていて、ロボットはフラッグの色や形、発信されているビーコンを頼りにフラッグを探すことになる。偶然フラッグを倒したのではないことを示すために、フラッグを倒す際には特定の攻撃モーション(どのような攻撃モーションにするかは競技者の自由)で倒さなければ、フラッグを倒したものと認められない。1試合につき2ラウンドの競技が行なわれ、1ラウンドは3分間。どちらのロボットも時間内にフラッグを倒せなかった場合は、終了時のフラッグまでの距離で勝敗を決める。フィールドから場外に出てしまった場合は、そのラウンドの競技は終了となる。2ラウンドで1勝1敗の引き分けとなった場合は、2ラウンドを通じてフラッグを倒すまでのタイムの短い方のロボットが勝ち上がりとなる。どちらのロボットもフラッグを倒せなかった場合はフラッグまでの距離が短かったロボットが勝者となる。 今回は学校(小・中・高校や大学、短期大学や専門学校等)で教育を受けている人が参加できる「学生部門」と、参加者に制限がない「エキスパート部門」の2つの部門が設けられており、どちらの部門も機体はKHRシリーズのみ使用が可能で、KONDO CUP機体レギュレーションの共通レギュレーションおよびKHRクラスレギュレーションに準拠している。遠隔操縦はすべて禁止だが、センサー類はフラッグに取り付けられる40kHzのビーコン発信器以外ならば何を取り付けてもよく、どのようなセンサーをどう用いるかが勝利へのカギとなる。また、学生部門はメインボードとしてRCB-1、RCB-3/3J、MP1及びMP2 HVを、コントロールボードとしてはKCB-1を使用することが定められているが、エキスパート部門は使用ボードの制限はない。 ……と、特に学生部門においては使用機体及び使用ボードがほぼ制限されている競技会ではあるのだが、競技そのものが全く単調にならないのは「完全自律型」の醍醐味。予期しない動作に競技者のみならず観客までもが手に汗握り、笑いの起こる大会となった。
● 個性あふれるロボットの動きに盛り上がる競技! 本大会では学生部門に9チームが、エキスパート部門に2チームがエントリーした。大きな窓が一面にあり、日当たりのよい会場は人間にとってはポカポカぬくぬくで快適なのであるが、フラッグの発見に赤外線や画像処理を用いているロボットにとっては非常に過酷な環境。途中でブラインドを降ろす等の対策が取られたが、学生部門のトーナメント第1回戦ではどのロボットもやや苦戦を強いられていたようだ。そんな中でも安定した強さを見せたのが、第1回ビーチフラッグで優勝した日本工学院八王子専門学校のロボット「躍進 Ver.海人」と、前回も準決勝までコマを進めた神奈川県立磯子工業高校のロボット「磯工ウォーカー」。この2体が危なげなく、1分をコンスタントに切る速さで次々とフラッグを倒し、トーナメントを上へと駆け上っていく。それに対して初出場の神奈川工科大学「KAITロボメカチーム」のロボット「習作1号」や、芝浦工業大学SRDC「Mysotisチーム」のロボット「Gramレプリカ」が、速度ではやや劣るものの確実にフラッグを倒す競技スタイルで食い下がるという図式になった。 3位決定戦は準決勝で惜しくも「躍進 Ver.海人」に敗退した「習作1号」と、シードによる第2回戦でやはり「躍進 Ver.海人」に敗退した「Gramレプリカ」の戦いとなった。頭部に取り付けられた2つの超音波センサーで、とにかく素早くフラッグの近くまで進む「習作1号」と、超音波センサー1つで首振りしながらフラッグを探し、1歩1歩確実にフラッグまで近づいていく「Gramレプリカ」。本大会で一番、それぞれのロボットの個性が際立つ一戦となった。
そして決勝は、準決勝で25秒14という圧倒的なタイムを記録した「磯工ウォーカー」と、二連覇を狙う「躍進 Ver.海人」との対決に。それまでのタイムを比較すると「磯工ウォーカー」有利かと思われたが、予想通りに行かないのが自律ロボットの奥深いところ。準決勝から決勝までの間に行なった調整が裏目に出てしまったのか、スタートでややコースをずれてしまうようになってしまった「磯工ウォーカー」に対し、コンスタントに好タイムを記録する「躍進 Ver.海人」。どちらが先にフラッグを倒すのか全く予想のつかない、まさにビーチフラッグの名に相応しい決勝戦となった。
こうして、学生部門は「躍進 Ver.海人」が優勝して見事2連覇を達成。準優勝も連続出場の「磯工ウォーカー」となり、経験と調整がモノをいう自律ロボット競技らしい結果となった。それでも3位、4位には初出場ロボットが入賞し、ハードウェアが決まっていることによる参加へのハードルの低さがうかがえた。
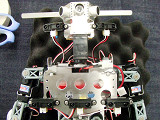
● センサーの使い方も動きも千差万別! 決勝では惜しくも涙を呑んだが、圧倒的な速度を誇った「磯工ウォーカー」。スタート地点からほぼ迷いなくフラッグまで一直線に向かうためには、やはりセンサーの取り付け方とその使い方に工夫があったようだ。「磯工ウォーカー」を見てまず目につくのが、多数のセンサーが取り付けられた頭部である。3方向にそれぞれ角度をつけて取り付けられた超音波センサーによって、スタート時に旋回角度が多少ずれても、確実にフラッグを発見することができるという。その下には2つのPSDセンサーが取り付けられ、フラッグとの位置関係の調整に用いている。胸部にも3つのPSDセンサーが並んでいるが、これらは直列に取り付けられて1つのチャンネルに接続され、3つのセンサーのうちのどれか1つでも反応すれば値が検出されるようにしており、使用チャンネル数の節約を図っている。また、頭部裏面にはLEDやブザー、スタート用のスイッチが取り付けられた自作基板が搭載されており、フラッグを発見したかどうかやフラッグとロボットとの距離などを、LEDの点滅及び音で表示することが可能となっている。この表示を見ながらプログラムのデバッグを行なうことで、調整を容易にしている。
それに対して、「躍進 Ver.海人」は3個のPSDセンサーのみを用いた、非常にシンプルなセンサー配置。それも基本は頭部に取り付けられたPSDセンサー1つでフラッグを発見し、両肩にそれぞれ取り付けられたセンサーは、攻撃モーションを行なった際に確実にフラッグを倒せるかどうかの確認用に用いている。 また、二足歩行ロボットは今回初挑戦という東海大学ロボカップサッカープロジェクトの「FC Twaves」チームのロボット「キャプテン・セヴォート」は本大会では唯一、画像処理によってフラッグの発見を試みたロボット。競技では歩行が安定せず、また加速度センサーと起き上がりモーションを準備できなかったため、なかなかフラッグまでたどり着くことができなかったが、これからが期待されるロボットである。
この自律ビーチフラッグ競技会、2回目を終えて競技者が傾向と対策をつかみタイムが短縮されている反面、対戦相手のロボットをフラッグと間違えて攻撃してしまったり、現在競技者が自由に選択可能なフラッグを倒す際の攻撃モーションに、フラッグを倒しやすいものと倒しにくいものがあったりと、ルールをもう少し見直す必要性も感じられた。二足歩行ロボットの競技としては珍しい自律ロボットの競技会、今後の発展とさらに賢くなるロボットの登場が楽しみになる競技会であった。 ■URL 近藤科学 http://www.kondokagaku.jp/ 近藤科学・自律ビーチフラッグ http://www.kondo-robot.com/beachflg.html ■ 関連記事 ・ 「KHR 4th Anniversary」レポート ~自律ロボット競技&11th KONDO CUPも開催(2008/06/27)
( せとふみ )
- ページの先頭へ-
|