記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
全国からツワモノどもが集結! 「ETロボコン2008チャンピオンシップ大会」が開催 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
● 新たな難所にチャレンジ! チャンピオンシップ大会に強豪が集結 本競技会は、規定の走行体【写真2】を利用して指定コースを自律走行させる競技だ。ほぼ同一のハードウェアで、UMLなどの手法を用いて分析・設計したソフトウェアの出来を競うコンペとして位置づけられている。このチャンピオンシップ大会は、国内5ブロックで実施された地区大会(本戦)の291チームから勝ち進んできた40チームの代表が集結し、最優秀チームを決定するもの。ロボットは「LEGO Mindstorms」で組み上げた大会指定の車体を使用するが、タッチセンサーと光センサーが各1個ずつしか使用できない仕様であるため、ライントレースしながら制御することが難しい。具体的な競技内容については【写真3】のような20mコース(INコース/OUTコース2周を各1回ずつ走行)で走行し、2回の合計タイムを競う。コースにはゲートや難所と呼ばれるチャレンジコースが設定されており、それらをクリアするとボーナス点が走行タイムから減算されるルールだ。たとえばコースの中間とゴールに設置されたゲート【写真4】を1回通過するごとに5秒減算され、さらにゴールの停止が50cm以内に収まれば10秒の減算が行なわれる(オーバーラン時は5秒)。
さらに難所として、OUTコースには近道となる「新ショートカット」【写真5】が設置され、INコースにも「ツインループ」【写真6】が用意されている。点線ショートカットは以前の大会でも設置されていたが、新しいショートカットは3つのカーブで構成される複雑なカーブで、難易度がより高くなったといえるだろう(昨年は緩やかなカーブで中間ゲートもなかった)。競技にエントリーしたチームは、このショートカットを攻略するために、ショートカットのマーカーを検知したあと、合計11個の点線のエッジを検出しながらステアリングを制御していく方法を取ることが多かったようだ【動画1】。新ショートカットをクリアすると1周ごとに10秒の減算が行なわれる。 一方、昨年まで鋭利なZクランクになっていたコースは、今回より2つのループで構成されるツインループに変更。この難所をクリアするには、ループの手前にある灰色のマーカーを検知した時にステアリングを振って、コースのエッジを検出し、途中でエッジ検出の位置を反対側に切り替えて走行する「エッジ切り替え」をするケースが多かったようだ。ツインループをクリアすると、1回目と2回目は5秒、3回目と4回目は10秒の減算が行なわれる【動画2】。このほかゴールゲート付近には勾配が100mm以下の坂道もある。坂道の頂上付近は斜角からセンサーに光が入りやすく、誤動作を起こしやすいため注意が必要だ。また上り坂では速度が落ち、下り坂では速度が増すので、うまく速度を制御する必要もある。
さて、本競技はロボットの制御・性能を競うものだが、あわせて分析・設計モデリングも審査される。モデルから作成したプログラムはC、C++、Javaなどの言語でコーディングされる。前述のように走行ロボットは規定のもので外観にほとんど差異はない。そのためロボットに実装されたソフトウェアが設計どおりに動くことが重要なところだ。コースを走破するというテーマに対し、どのように分析と設計モデリングが行なわれたのかという点が競技の大きな目的になるというわけだ。 ● 走行時の分析データをいかに開発に活用できるか
「ロボコンやらないか」は、群馬大学大学院情報工学講座の有志によるチーム【動画4】。このロボットの特徴は3つある【写真7】。短期に開発するために、並列処理と逐次処理のタスクを併用したことが1点。タスクスケジューラに基づいて、光センサーやマーカー検出などのタスクは並列実行、走行方法に関するタスクは逐次実行で処理している。また、ハンドル操作、モータ駆動、継続時間などの擬似命令をつくり、それらを柔軟に組み合わせて、ドルフィンジャンプやゴール後停止位置の調整などに利用したそうだ。 3つ目の特徴は走行履歴レコーダだ。センサーの値、走行モード、電圧、マーカー検出時刻などの内部状態をデータとして記録し、それをもとにデバッグに役立てるという発想だ。この記録を見ればハンドルを切るタイミングや機体の状態継続時間を微妙に調整できる。航空機のフライトレコーダを見本にしたという。このような工夫は他のチームでも見られたが、F1のように走行データを解析して、その結果をいかに活用できるかということも勝負のカギを握っているようだ。
「青大ロボコン研」は、青森大学ソフトウェア情報学部の学生4人と教員1名で構成するチーム【写真8】【動画5】。完走と難所のクリアを目標に、マーカーを正確に認識し、ラインを外さないよう工夫したという。難所の走行は競技直前でも設定を変更できる設計だ。また地区大会では下り坂マーカーの検出がうまくできず、ゴール後の停止に失敗した経験があるため、マーカー検出のキャリブレーション、色判定、エッジ走行などの方法も見直したそうだ。 たとえばキャリブレーションでは、黒・白・灰色の各64点を測定し、その標準偏差(σ)を求め、平均値±3σ内のバラつき内に収まるものを検出範囲として決定。これらのデータをもとに、エッジ走行のステアリング制御では2つのしきい値を基準に左右の舵取り、舵停止の動作を行なった。このほかドルフィンジャンプへの対応をしたという。
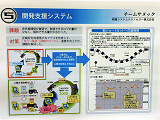
テロリスト集団からサイバーシティ・ハカタを守るため結成された戦闘部隊という設定の個人チームが「秘密戦隊ハカタ」だ【動画6】。同チームは短時間で効率よく開発を進めるためにモデリング手法を積極的に導入。開発環境を補うためにPC上で動作するツールを作成したことがポイントだ。たとえば走行要素を最小単位に分解し、それらをGUIで並び替えることで走行戦略を作れるシナリオエディタを開発【写真9】。この走行シナリオはPC上でシミュレータを用いて動作・確認ができるように工夫したそうだ。そして実際にロボットを走行させ、データログを取得してグラフ化を行ない、その分析結果を再びシナリオ作成に反映させるという流れで開発を試みたという。
● PID制御で変化に対応する安定走行を実現するロボット 「ひよっこえんじにあーず」は、神戸電子専門学校の学生チームだ。「私たちは絶対にリタイヤしません!」を合言葉に、学生に与えられた時間を十分に活用し、モデルと実走行の完全一致を目指したという【動画7】。機体制御はPID制御をベースとし、低速時/高速時/ふらつき時にアルゴリズムを切り替えている。たとえば低速時はP(比例)制御のみで、1点のエッジ上を確実に走行させる仕組み。一方、高速時は改良型PD(比例微分)制御とし、急激な変化にも対応し、安定走行できるようにしている。このときのD(微分)制御は、目標値に対して正か負方向かで2値化しており、走行体が正方向でエッジに近づいているときにはブレーキをかけて減速する。また走行体にふらつきが起きた場合には、センサーの連続読取り回数を見ながら、小刻みに駆動モータにブレーキをかけて安定化させる工夫も凝らした【写真10】。難所に対しては、それぞれのコースに対する専用走行はつくらず、突入の精度を高めることでドルフィンジャンプや点線ショートカットを攻略する作戦だ。もちろん走行中に発生するさまざまな状態を想定し、柔軟に対応できるようにした。ツインループでは、コースのマーカーがクロスする地点を乗り越えた瞬間を検知することで自己位置を判断し、適切な処理を行なうという。
タイ語で“楽しく”を意味する「サヌック」は、明電システムテクノロジーのメンバーで構成するチームだ【動画8】。メンバー全員がUML技術認定技術者であるため、モデリングには自信があるそうだ。ロボットの設計思想は、正確なPID制御によって高速かつ安定な走行を可能にしたこと。通常のエッジ走行よりヘッドの振れ幅が微小になり、ライントレースが安定するようになったという。 また走行調整時はプログラムを入れ替えるのではなく、赤外線通信によってパラメータを送信することで対応した。特に目を引いた点は、圧縮双方向通信クラスを作成して通信速度を向上し、走行・解析・調整のサイクルを向上させたことだ【写真11】。従来の赤外線通信では通信速度が遅いため、取得ログ量が少なくて十分な解析ができなかったからだという。このようにして制御結果をログとして収集し、それを徹底的に解析して設計に活かせるように工夫したそうだ。 ロボットのふるまいは、ドルフィンジャンプ、新ショートカット、ツインループ、ゴール後停止といったコースのパーツを状態として捉え、イベントとアクションを起こして柔軟に対応する仕組み。新ショートカットでは、正攻法の点線追従方式による制御を行なっている。11個の白黒ラインを1つずつエッジで検出し、ステアリングを制御する方式だ。たとえばセンサーで黒から白に変化を認めるとコースアウトとみなし、ステアリングを切る制御を行なうが、もとのコースに戻るには適切な切り返しが必要になる。しかし、ショートカットコースは曲率が逐次変化するので切り返し量もそれぞれ異なる。そこで切り返し量をパラメータにして、適宜調整する際に前述のような通信方法が威力を発揮するという。 実際には新ショートカットの攻略は、直線的なルートになるようにカーブを補間してトレースしたほうが切り返し量や回数が少なくて安定する。そこで曲率が小さくなるエッジ側でセンシングしたほうがよいので、エッジ検出の位置を途中で切り替え、直線的なルートをたどるように工夫していたようだ。
● バッテリの電圧変化もポイント! 電圧変化に対応して速度調整も グレイ(灰色)の検出に徹底的にこだわったのは「R-GRAY SCKO3」チームだ【動画9】。というのも、これまでの大会で灰色(GRAY)の検出に泣かされてきた苦い経験があるからだという。それはチーム名のR-GRAY(Retry&Revenge-GRAY)にも現れているぐらいだ。走行体にはヤングの干渉実験を利用して製作したスリット付の円形遮光スカートを装備。光センサーが一定区間で連続して灰色を検出する部分と、移動平均値で変化が少なく安定した部分が重なった場合に灰色として判定することで、マーカーの検出確度を確実に高められるという分析結果を得た。新ショートカットの攻略は、マーカーを検出し、ショートカットのコースに突入したら速度を落とし、点線追従方式によって右エッジ走行をしながら、白と黒の点線を丁寧に検出して走行速度とステアリング角度を制御する。このあたりは他チームと同様だ。さらにバッテリ電圧が変化すると、モータ速度や点線の検知回数に影響を及ぼすことが判明したため、電圧変化に対応して走行速度を調整できる処理も追加したそうだ【写真12】。ツインループの攻略では、エッジ検出の切り替えを行なうが、この際にステアリング速度を落とすことで、急ハンドルによるコースアウトを防止している。
「蕨レーシングチーム'08」は、沖通信システムの新人で構成するチーム【動画10】。同社が蕨市にあるため、このチーム名になったそうだ。ロボットの設計思想は安定した走行を目指すこと。そのために走行に「ゆらぎ制御」を導入したという。走行中にゆらぎが始まると、ロボットは黒線を外れて、通常走行時よりも白い色をセンサーで連続検出することになる。そこで色の読み込み回数を監視し、白の検出が一定以上ならば後輪の速度を落とす。またステアリングを切りすぎると脱線する恐れがあるので、一定角度以上にステアリングを切らないように工夫したという。さらに光センサーの値を統計的に処理し、マーカー認識の確度も高めた。 ロボットのスピードについても、コースの上り下りの坂道を電圧変化で認識し、それに合わせて速度を制御。上り坂では抵抗が増すので電圧が下がり、下り坂では抵抗が減るので電圧が上がる。もし上り坂と判断できたら頂上付近でセンサーが床から離れて光が入り込むため、誤認識を防止するためマーカーを検出しないようにした。また下り坂では速度が速くなるので、減速してマーカーを読み取りやすくするという具合だ。これによりマーカーの誤認識やコース逸脱を防止できるようになったそうだ【写真13】。
「なんだいや」は、リコーソフトウェアの鳥取開発センター開発グループで構成するチームで、関西大会でエクセレントモデル賞に選ばれた強豪だ。本大会ではさらにブラッシュアップしてモデルの改良に励んだという【動画11】。設計思想はモデリングと実装を分離し、概念をしっかりと「見える化」すること。 マーカーを認識する際は、一定期間のセンサー値の変化量が一定値以下の場合に安定期とみなし、灰色付近の安定期があれば、それをマーカーとみなす。難所の攻略では、新ショートカットを点線追従方式から「ぬこダイブ」という新走法に変更。これは「段ボールに飛び込む猫」の様にゲートに滑り込むイメージで、ショートカット入口でマーカーを検出し、角度を1回調整するだけでコースに合流できるもの。点線追従方式のような点線ごとの調整が不要で、簡単に制御できる点が特徴だ【写真14】。 一方、ツインループではラインのエッジ切り替えを行なわず、通常のマニュアル走行オブジェクトを連続的に呼び出すことで、細やかなステアリング制御を実現。これにより試走会でもツインループの失敗は皆無だったそうだ。同チームは、新ショートカットでもツインループでも、難しい課題を難しい状態で解決しようと試みるのではなく、できるだけ簡単な状態になるように落とし込んでから解決するという方向だ。
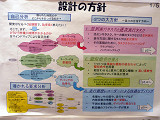
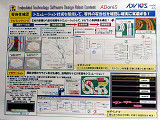
● 完璧な走りをみせた最終戦「ADoniS」vs「あずまひろしはじめました」の戦い 「ADoniS」は、東海地区代表のアドヴィックス社によるチームで構成。3度目の出場になるが、今年は競技部門とモデル部門いずれも優勝を目指し、完全制覇を狙ったそうだ【動画12】。マイコンに実装するプログラムをモデリングするのではなく、上位レイヤーとして走行体(PassFinder)そのものをモデリングし、それをシミュレーションしてドルフィンジャンプなどを実現していた点が審査員から大きく評価された。実際の開発はオブジェクト指向分析とUML表記を適用し、実装コードを半自動生成するモデリング手法をベースにしているが、コース上の位置推定や障害物回避などの動的な振る舞いの検証に「MATLAB/Simulink/Stateflow」を利用。最近、MATLAB/Simulinkは制御系でよく導入されるようになった。これらのツールによって、実機で計測したデータからシミュレーションを効果的に適用し、仕様を再検討した。そして「MATLAB/Real-Time Workshop」でコードを実装したという。たとえばドルフィンジャンプを実現するにあたり、2点の座標を通過する旋回円と着水ラインを算出し、ドルフィンロジックをモデル化した後、車両特性から走行軌跡をシミュレーションして確認。さらに適切なドルフィン制御量となるように各定数を決定し、シミュレーション結果と実走行の軌跡を比較している【写真15】。 ツインループの攻略では、入口のマーカー部で操舵の勢いが強すぎて再度ループに入ってしまったり、ループ上で急激なステアリング変化によりエッジの切り替えがふらつくといった現象が起きるため、無駄な操舵をできるだけ抑えるように制御することで防止し、1ループあたり1秒の時間短縮を可能にしたという。また新ショートカットでも、急カーブで走行体が追従できなかったり、カーブの向きが変わった際に走行体が点線に対して急角度になり点線をすり抜けてしまうことがある。そこで操舵時間を監視し、舵を一瞬保持して急な切り返しなどを防止することで、点線トレースに対応させたという。
残念ながら入賞を逃した「あずまひろしはじめました」【動画13】は、ストレートでもカーブでもコースに関わらずアクセルベタ踏み(=最高速度)にこだわったユニークな設計にチャレンジしていた。高速走行時はストレートコースでは舵行が起こり、カーブ走行ではカーブを曲がりきれずコースアウトが起こるリスクがある。そこでタッチセンサーによって駆動と舵取りのパワーバランスをうまく調整することで、コースのエッジに沿って最高速でも安定する走行を目指した。 一方、マーカーの検知を確実なものにするために、走行中のラインの色をキュー構造でプールし、黒・白・灰色の判定結果を蓄積した。そこで灰色の出現回数が全体のある割合より大きくなればマーカー上を走行していると見なしたという。またマーカーの誤検知を避けるために、マーカーの探査/未探査/特殊走行という3パターンで走行区間を分けて認識させ、特定マーカーを直前から探査するようにした【写真16】。ツインループの攻略は、他チームと同じように、エッジ検出を途中で逆側のエッジに切り替えるようにしているが、ここでも速度を落とさずに走行することを目指したという。同チームは昨年と同様にゴール近辺で面白いパフォーマンスを披露した。今回はゴール停止時にロボットからメロディーが流れ、観客を大いに楽しませてくれた。
本大会の結果をまとめると以下のとおりだ。 【総合】 ■優勝 ADoniS(アドヴィックス)【写真19】 ■準優勝 ロボコンやらないか(個人)【写真18】 ■3位 サヌック(明電システムテクノロジー)【写真17】 【モデル部門】 ■Excellent Model サヌック(明電システムテクノロジー)【写真17】 ■Gold Model ADoniS(アドヴィックス)【写真19】 ■Silver Model なんだいや(リコーソフトウエア) 【競技部門】 ■1位 ADoniS(アドヴィックス)【写真19】 ■2位 ロボコンやらないか(個人)【写真18】 ■3位 蕨レーシングチーム'08(沖通信システム) 【特別賞】秘密戦隊ハカタ(個人) 【特別賞】ひよっこえんじにあーず(コンピュータ総合学園 神戸電子専門学校) 【デンマーク大使館特別賞】青大ロボコン研(仮)(青森大学 ソフトウェア情報学部) 【デンマーク大使館特別賞】R-GRAY SCKO3(ソフトウェアコントロール)
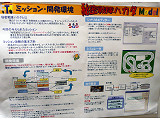
● 2009年は新走行体「2輪倒立振子ライントレーサー」の導入も 競技会が終了したあと、来年のロボコン大会に向けて、いくつかのアナウンスがあった。発表によれば、2009年大会から新しい走行体と開発環境が取り入れられるとのこと。これまでの7年間はLEGO Mindstorms RCXを搭載した走行体であったが、2009年より従来の走行体に加え、もう1つLEGO Mindstorms NXTをメインにした「二輪倒立振子ライントレーサー」による競技がスタートする。コースについてはRCXおよびNXTの走行体とも同じものになる予定だ。一方、モデル審査に関しては継続して行なわれるが、クラス分けやカテゴリ分けも検討しているという。NXTの導入によって、CPUも32ビットARMになり、メモリ容量も利用できるセンサーも増える。また赤外線通信からBluetooth通信となり、データのロギングも容易になるなど、使い勝手も大幅に向上する。クロスコンパイラはGNU ARM(GCC 4.01)で、オープンソース開発環境としては「nxtOSEK」(TOPPERS/ATK) および「TOPPERS/JSP for NXT」(C/C++による開発)、「leJOS NXJ」(Javaによる開発)がサポートされる。ちなみにnxtOSEKは、名古屋大学のTOPPERSをベースとした国産オープンソースRTOSで、自動車制御用として開発されているものだ。さらにもう1つ「NXT-JSP」と呼ばれる開発環境も用意される予定だ。 来年の競技に向け、新走行体によるデモンストレーションも実施された【写真20】【写真21】【動画14】【動画15】。新競技に用いられる二輪倒立振子ロボットは、光センサー、ジャイロセンサー、タッチセンサー、超音波センサーを搭載し、駆動系はエンコーダ内蔵DCモータで左右の車輪を独立制御する。したがって参加者はジャイロセンサーを購入する必要がある。
気になる倒立振子のバランス制御については、nxtOSEK C APIライブラリとして提供されるため、いちから制御プログラム必要はない(Javaについては検証中)。このあたりは制御で最も難しいところだと思われるが、ブラックボックスとして利用できるので、細かい部分はパラメータチューニングで済むようだ。また2009年3月よりアフレルが教育用LEGO Mindstorms NXTのETロボコンセットを販売する予定だ。来年から二輪倒立振子ライントレーサーの競技がスタートすることで、ますますETロボコンが面白くなり、参加者もヒートアップしそうだ。 ■URL ETロボコン2008 http://www.etrobo.jp/ETROBO2008/index.html ■ 関連記事 ・ 「ETロボコン2008」関西地区大会レポート(2008/09/29) ・ 組み込み機器が一堂に! ETロボコンのチャンピョンシップ大会も ~Embedded Technology 2007/組込み総合技術展より(2007/12/07)
( 井上猛雄 )
- ページの先頭へ-
|