記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
「ETロボコン2008」関西地区大会レポート |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ETロボコンは、2002年にUMLロボットコンテストとして始まり、2005年からETロボコンと名称を変更、今年で通算7回目を迎える。毎年約1.7倍のペースで参加者が増えており、昨年から関東・東海・関西で地区予選が行なわれるようになった。 今年は過去最高291チームのエントリーがあり、新たに東北と九州を加えた5地区で地区大会として開催することになった。各地区大会の優秀チームが、2008年11月に開催されるチャンピオンシップ大会へ出場できる。 参加者の多くは、組込みソフトウェア開発の技術者や工学系の学生で、技術教育がコンテストのテーマとなっている。ETロボコンの特長は、同一のハードウェアを使用することで、システム開発における分析・設計モデルによる「ソフトウェアの設計コンペ」を主眼とする点にある。 そのため、ETロボコンはロボットがコースを走るショートトラック競技のタイムと、参加チームが事前に提出するUML(Unified Modeling Language)等で、分析・設計したモデル(ソフトウェアの設計図)の審査の両方が評価される。
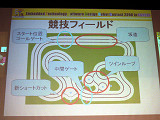
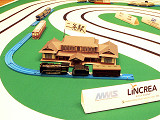
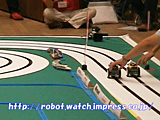
● チャレンジレーンが新しくなった「ETロボコン2008」 ショートトラック競技のフィールドは緑で、1周20mの白い車線が描いてある。車線内には、ロボットがセンシングするための黒いコースが2本ある。ロボットはこのインコース・アウトコースをそれぞれ2周走り、計4周の総合タイムを競う。コース途中の中間ゲートを通過し、ゴールゲートを通過後50cm以内で停止をすると、ボーナスタイム(タイムの減算)が与えられる。今年は、コース内にある難所と呼ばれるチャレンジレーンの形状が変わった。 インコースは、昨年のZクランクから「ツインループ」と呼ばれるものになった。ループを素通りして走ればショートカットになるが、ループ内にはそれぞれゲートがあり、2回通過までは5秒、3回目以降は10秒がボーナスタイムとして減算されるというルールになっている。 一方、アウトコースの難所は「新ショートカット」と呼ばれ、その難所内の点線のショートカットは波状にカーブしている。昨年までのショートカットは、緩やかなカーブの点線で中間ゲートもなかったため、ショートカット分岐点の灰色ゾーンを検知した後、点線を無視して直進し強行突破する作戦をとることができた。しかし今年は、中間ゲートを通過してボーナスポイントを狙うためには、複雑な制御が必要となる。なお、新ショートカットをクリアすると1回ごとに5秒のボーナスタイムとなる。 ロボットは、「LEGO Mindstorms」を使用し、規約で定められた設計図通りに組み立てなくてはならない。部品の分解・改造は禁止されている。センサーは、タッチセンサー1個と前方のステアリングに光センサーが1個しかない。そのため、ラインの検知が非常に難しいという。常にステアリングを左右に動かしてセンシングするため、スピードを出しすぎると機体のバランスが崩れてしまうのだ。また、ゴール前には高低差100mm以内の勾配があり、登りと下りでモータ出力を制御する必要もある。 フィールド内には五重塔や二条城、舞子さんなど京都らしいオブジェが飾られており、新幹線なども走っていた。実は、ETロボコンはトレース競技ではないため、ラインを脱線してもフィールド内を自由にショートカットできる。このワザを「ドルフィンジャンプ」と呼ぶのだが、これらのオブジェはドルフィンジャンプの妨害をする役目も果たしている。 大会前の試走会が終わると、車検を行なう。参加者は、この時に配布された乾電池を使用して競技に出場しなくてはならない。そのため、試走時よりバッテリ電圧が高くなってスピードが出て、センシング不能になるケースもまま見られた。 ETロボコン観戦の楽しさは、同一設計のロボットがソフトウェアによってどれだけ性能差が出るかという点だろう。ロボットの動きを見た後に、コースの攻略方法などを検討したモデル図を見ると、製作者の意図とその実現の難しさが分かって面白い。
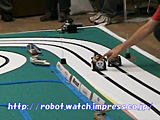
● チャレンジレーンの攻略が見どころ「ショートトラック競技」 ショートトラック競技は、やはり各チームが難所にどのようにチャレンジしているかが見どころになる。ツインループは、昨年のZクランクよりも難易度が下がったそうで、トライするチームが多かった。とはいうものの、チャレンジしたがループを周回できずにショートカットしたり、ループから抜けられずに無限ループになるチームもあった。UMLの解析を見ると、ループを走る際には灰色のマーカを検知した時にステアリングを振って、コースの右エッジ・左エッジを検出しながら走っているケースが多かったようだ。
アウトコースに設定された新ショートカットは、昨年度より難易度が上がったためか、チャレンジするチームが少なかった。 「誠レーシングチーム(旭情報サービス(株) 大阪支社)」は、新ショートカットを抜けた後にアウトコースに戻ることができなかった。運よくインコース上で停止して周回を始め、ツインループをショートカットしてそのままゴールへ向かうかと期待したが停止してしまい、インコースのロボットと追突し走路妨害となってしまった。あのままゴールしていたら面白かったのだが、ETロボコンでは、インとアウトでは走行プログラムを変えているケースが多いため、なかなか完走は難しいようだ。 新ショートカットをクリアした「クミー(高松高専 専攻科)」は、ショートカット内の点線を無視してロボットを直進させ、緑を検知したら左折、次に黒ラインを検知したら右折するという制御をしていた。 ショートトラック競技は、インとアウトを走行した合計タイムで成績が決まるため、どちらかをリタイアすると上位入賞は望めない。そのため第1走行でよい成績を残したチームは、第2走行では無難に完走して、成績をおさめたいという気持ちになる傾向にある。実際、走行前のインタビューで「チャレンジは止めて堅実に行きます」というコメントをしたチームもあった。 そうした中で、第1走行でツインループを成功し、ゴール後停止も見事に決めた「デッドロック」は、果敢に新ショートカットに挑んだ。途中まで、波線をきれいにトレースしていたのだが、途中でロボットが停止してリタイアとなった。 エラーの原因は、バッテリの電圧にあったそうだ。点線を検知して走行するのは難しいため、新ショートカットに入る手前でスピードを落とすプログラムになっていた。ところが、バッテリの電圧が試走時よりも高かったためスピードが出てしまい、予定した地点で速度を落とすことができなかったという。 そこで全競技を終えた後、「デッドロック」にもう1度アウトコースを走ってもらった。スピードを落とす位置を調整するために少し後方からロボットをスタートさせると、新ショートコースを見事にトレースしてゴールした。ゴール停止も決まり、完全なクリアだった。競技中にこの走りを見ることができなかったのは、非常に残念だ。
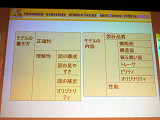
● 総合順位は、モデル審査と走行のバランスで決定 参加チームが事前に提出したUMLは、全て展示されていた。今年は各チームのUMLに審査委員のコメントがつけられており、参加者達が熱心に読んでいた。モデル審査は、エクセレントモデルに「なんだいや(リコーソフトウエア株式会社プロダクト事業部 鳥取開発センター)」、ゴールドモデルに「フンフン(NECソフトウェア北陸)」、シルバーモデルに「R-GRAY SCK03(株式会社ソフトウェアコントロール関西支社)」が選ばれた。 モデル審査は、A~Dの4ランクに分類される。48チーム中A評価を得たのは「なんだいや」のみだった。「なんだいや」は、ETロボコン2007本選でもエクセレント・モデル賞を受賞している。UML作成にあたり、モデリングと実装方式を分離して考え、量や範囲も含めて概念を理解しやすいモデルを作成した。また機能要求・機能外要求を明確にしたうえで、デザインに反映したという。
ETロボコンの総合成績は、ショートトラック競技とモデル審査の結果によって決定する。そのため、競技で優勝していてもチャンピオンシップに出場できるとは限らない。せっかくチャレンジレーンをクリアしても、UMLに記載がなかったりすると評価されないという。結果として、モデルの良さと走行の良さがバランスよく達成されているチームが総合的に評価された。 チャンピオンシップ大会は、2008年11月19日(水)~21日(金)にパシフィコ横浜において「Embedded Technology 2008」の併催イベントとして実施される。関西地区からチャンピオンシップへの出場権を得たのは、総合順位上位6チームに審査員特別賞の計7チームだ。 1位:なんだいや(リコーソフトウエア株式会社 プロダクト事業部 鳥取開発センター) 2位:R-GRAY SCK03(株式会社ソフトウェアコントロール関西支社 ) 3位:電子くん(個人) 4位:CrossSection(株式会社北斗システム) 5位:ひよっこえんじにあーず(学校法人コンピュータ総合学園 神戸電子専門学校) 6位:フンフン(NECソフトウェア北陸) 審査員特別賞:デッドロック(個人) ■URL ETロボコン2008公式サイト http://www.etrobo.jp/ETROBO2008/index.html 組込みシステム技術協会 http://www.jasa.or.jp/top/ Embedded Technology 2008 http://www.jasa.or.jp/et/index.html 京都コンピュータ学院 http://www.kcg.ac.jp/ ■ 関連記事 ・ 組み込み機器が一堂に! ETロボコンのチャンピョンシップ大会も ~Embedded Technology 2007/組込み総合技術展より(2007/12/07)
( 三月兎 )
- ページの先頭へ-
|