記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
「ロボプロステーション」特別講演レポート |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
講演は、最初に前田氏が製作したロボットの原点ともいえる「OmniHead」から、初優勝を勝ち取った「OmniZero.7」までの変遷を、それぞれ試行錯誤とともに解説する第1部。そして、これまでの実体験をもとにした、第2部「ロボット作りのコツ」という構成だった。最後に「OmniZero.7」のデモンスレーションを披露してくれた。以下、前田氏談。 ● 前田氏がこれまで製作したロボットたち
「OmniHead」は当時としては全長290mmと小型でかつ軽量なものでした。その頃はまだロボット用サーボというものが発売されていなかったので、ラジコンカー用ですがSANWA製のERG-VBという強力なものを使いました。22軸というのは当時では多いほうだったのですが、小型にまとめることができました。脚や腕の自由度は一般的な構成ですが、腰にも2つの自由度を設けています。腰の動きがあると格闘大会で有利に働くので、これまで作ってきた「ROBO-ONE」用のロボットには全て採用してきました。CPUは当時HITACHI、現在はルネサスから発売されているH8(16MHz)。フレームは今でも皆さんがされているように切削したアルミを曲げて作りました。送信機はラジコン用を流用しました。全方位カメラっぽいものがついていますが、これはダミーです。「ROBO-ONE」初出場で準優勝できたので、最初にしてはなかなかいいロボットだったんじゃないかなと思います。
「ROBO-ONE」に初出場したとき、「やっぱり重いロボットは強いな」という印象を受けたので、大きくて重いものを作ろうと思いました。「OmniHead」が1.9kgだったのに対し、当時の重量級に値する3.5kgと極端に重量を増やしました。サーボはハイテック製でしたが、これもロボット用ではなく大型ラジコンカー用のものを使って24軸。前作より2軸増えたのは、手先にグリッパーを付けて物を掴むギミックを加えたためです。CPUやフレームの製法等は前作と同じです。これは「ROBO-ONE」本大会には最終的に出なかったのですが、「第2回 ROBO-ONE バンダイカップ」と「ROBO-ONE NBCカップ」でともに準優勝しました。しかし、私自身の評価としては、重すぎてあまりちゃんと動かなかったので失敗作かなと思っています。
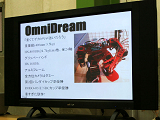
前作「OmniDream」が重すぎたという反省から、サイズはあまり変えず、2.5kgと軽量なものを作りました。JR PROPO製のDS8511というアクロバット用の大型ラジコン飛行機に使われるサーボで24軸。片手が物を掴むグリッパーで、もう片方の手には伸び縮みでパンチを繰り出せるようなギミックを作りました。CPU、フレームの製法、ダミーのカメラなどはこれまでと同じです。そして「ROBO-ONE」でまた準優勝。この頃、準優勝グセがついてしまったのかなと思いました(笑)。でも、軽量でよく動くお気入りのロボットです。闘うため、勝つために作った最後の「戦闘ロボット」でもあります。
この頃、製品試作に使われる「積層成形」といって、素材断面の形状を積み重ねて自由な形を成形する装置を使ってみたくて樹脂を採用しました。サーボはハイテック製のHSR-5995TGという初期のロボット用ですが、トルクが強いもので、軸数は24。それまではダミーのカメラでしたが、CPUをルネサスのSH-2(40MHz)に変えることで、本物のカメラを搭載し画像処理できるシステムを作ることができました。アルミフレームの代わりに丈夫なCFRPと、ABS樹脂を積層成形した白い外装部分の2種類から成ります。 例えば、中にフレームがあって柔らかい外装がついているような構造とは異なり、外装は力を支えるパーツでありフレームと一体構造である「モノコック構造」に挑戦しました。配線は、皆さんも駆動時にはさまって断線しないよう工夫されていると思いますが、このロボットでは軸内配線にチャレンジしました。成績ですが、「第6回 ROBO-ONE」予選2位、決勝では初戦敗退。これまで使っていたアルミとは違い、プラスティックで自由な曲面がつくれることが嬉しくて。新しい挑戦ができたという意味では良かったのですが、外装に凝りすぎて本質を見失っていたのかもしれません。
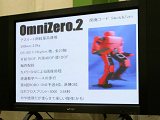
前作で採用したABS樹脂の積層成形では、素材の性質上、剛性が落ちたり素材がたわんで組み立てにくいという弱点がありました。ここで「やっぱりロボットは動いてなんぼ」という原点に立ち返って、小さく、軽く、よく動き、かつ剛性のあるロボットを目指しました。名前も原点回帰ということで、「OmniZero」にしました。これ以降に製作したロボットの名は、この名の後に数字の組み合わせたものにしています。重量は2.5kgと軽量で、サーボもJR PROPO製のDS8511に戻し、26軸に。片脚6.5自由度というスペックですが、両脚をひねる軸がギアで連動開閉するので0.5自由度。ここで5.5自由度ですが、加えてこのとき初めて膝にダブルサーボを採用しました。サーボを2つを直列に仕込み、膝の上下をそれぞれ別のサーボが曲げるので、速い動作ができるようになりました。この方法は「ROBO-ONE」などいろいろな大会で見かけるようになりました。流行りつつあるのかもしれませんね。 また、前作では外から配線が多少見えていましたが、「OmniZero」ではほとんど配線が見えない状態にし、相手の機体にひっかりにくくしました。CPUは前作と同様、カメラは広角のカメラを使いました。「よく動くロボット」を目指していたので、これまでのモーションによる歩行から、初めて逆運動学による歩行を採用しました。「第7回 ROBO-ONE」で予選2位、決勝16位でした。ロボット作りにおいての目標やコンセプトはクリアしたのですが、攻撃力に欠けていましたし、やはり軽いとバトルでは不利だなと再び思い知らされました。
次は前作をベースにもっと強いロボットにしたいということで、全身のサーボを強化することにしました。サーボ自体は、前作で使用したものと同じですが、脚など主要部のみ強いサーボにして軽量化を計っていました。そのため、転倒するとすぐ肘のサーボが壊れてしまうということがありました。全身にJR PROPO製のDS8511を使用することで、重量を増やして安定さたり、肘の故障も回避できたり、部品の手配や交換も楽になりました。片脚7自由度ですが、膝はダブルサーボにせず、初めてつま先に1自由度を設けました。これはロボットがペタペタ歩くのに対して、人間はかかとから入ってつま先から抜けるという歩き方をしていることに気がついたためです。つま先の自由度を使った複雑な逆運動学に挑戦したのですが、この時はあまり有効に使うことができませんでしたね。 成績ですが、「第8回 ROBO-ONE」予選4位、決勝で3位でした。私としてはつま先の自由度をあまり上手く使えなかったり、予選のほうが成績が悪かったりと、スッキリしない部分もありました。この後のロボットではつま先の自由度を無くしたのですが、今後もまたチャレンジしてみたいと思っています。
今度は「ROBO-ONE」向けというわけではなく、アスリート用ロボットをつくりました。3,000mm、5,000mmといったトラックを走る陸上競技「ロボプロ スプリント」用のものです。速さを得るために、全長390mmで2kgと軽くて脚の長いものにしました。脚など主要なサーボは引き続きDS8511、それ以外は軽量化のために小さいサーボを使って全23軸。片脚7自由度ですが、前作のようなつま先の複雑な構造はなく膝のダブルサーボを再び採用しました。遊びも入れて片腕4自由度。腰はこれまで2自由度にしていましたが、軽量化のため速く起き上がる際に有利な前屈の動きを排除して、1自由度にしました。結果「ロボプロスプリント・3000」で3.84秒という大会記録が出せました。肩のサーボが弱いので壊れやすいという弱点がありますが、軽快に走る姿は見ていて楽しいものです。
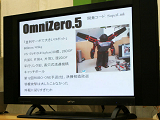
やっぱり「ROBO-ONE」で勝てないと、ということで、再び重くて強いロボットを製作しました。サーボ2つ1組で1ブロックとし、10組で構成する「10ブロック構造」に挑戦しました。この時サーボをこれまで使っていたJR PROPO製の大型アクロバット飛行機用のDS8511から、ロボット用のDSR8801に変更して「10ブロック」で全23軸。片脚7自由度、片腕4自由度、そして腰に1自由度設けました。配線の通せるブロックを全身に使った軸内配線。他は今までと同じスペックです。「第10回 ROBO-ONE」で予選19位、決勝初戦敗退とこれまでで最も成績が振るいませんでした。私としては忘れたい過去。このときは「もうROBO-ONEへの出場を辞めようかな」と思ったぐらいです(笑)。
でも、また作りました(笑)。うち(ヴイストン) の大和社長から、平行リンクというアイデアをもらい、これは良さそうだということで初めて採用しました。実はこのとき「平行リンク病」にかかっちゃて(笑)。いろんな構造を持ったロボットを作るつもりが、いつの間にか「平行リンク」から抜け出せなくて……もう重病でした。途中から気を取り直して「平行リンク」以外の要素にもチャレンジしましたが、ロボットに新しい要素を採り込むのはすごく難しい。でも楽しいんですよ! このロボットは390mmで3kgぐらい。サーボは全てJR PROPO製のDSR8801を使って全21軸としました。ここでは膝のダブルサーボは採用せず、「平行リンク」になっているので、仕様的には片脚6自由度ですね。片腕4自由度ですが、動き方を変えたり、グリッパーをつけたりしました。メカニズムに前途の「平行リンク脚」、そしてこのロボット以降必ず採用するようになった、サーボの外で減速する「長穴式減速機構」。PSDセンサー16個と頭脳にARM7を導入することによって、半自動的に攻撃するようなシステムにしました。全自動では人間のコントロールには勝てそうにないので、ボタンを押したら、ある程度はロボットが判断して攻撃するような仕組みにしたいと思いました。あとはハシゴ昇りを「ROBO-ONE」のデモで披露しました。その評判が良かったのか予選は1位。しかし、決勝はベスト16。前作で一度は諦めかけた「ROBO-ONE」でしたが、このロボットでいろいろ新しい技術を採り入れることができたり、それらを後のロボット作りにも生かせていけたので良かったと思っています。
このロボットでは、少し大型化して「並列サーボ」を採用しました。サーボは、ヴイストン製品のVS-SV410を30個。この時、羽根を付けたので片羽根3自由度、そのせいで全体の自由度が多くなっています。なぜ羽根を付けたかというと、この時の「ROBO-ONE」のテーマにキャッチボールがあったからです。ロボットの腕だけでキャッチするのは相当難しいだろうと思い、2つの羽根と2つの腕の計4本でキャッチしようと考えました。「第12回 ROBO-ONE」予選2位、決勝初戦敗退という結果でした。羽根はバトル時の攻撃にも使えるだろうと思っていたのですが、実際はあまり攻撃力がなかったんですよ。私としては、羽根がついた外観が気に入っているんですけど、結果が伴わなかったので、やはりいいロボットとは言えないかもしれません。
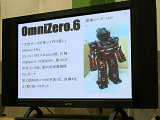
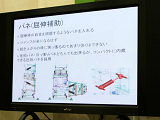
前回よりも更に大きなサーボ、ヴイストンのVS-SV1150、115kg・cmを数個、他のサーボと組み合わせて21軸。この時の「ROBO-ONE」のテーマが「ロンダート(側転をしながら体の軸を回転させて着地する体操の技)」だったのですが、全長600mm、重量4.9kgと大型にもかかわらず、結構キレイにこなすことができました。「第13回 ROBO-ONE」予選1位、決勝4位と、それまでの私の大型ロボットの中では良い成績が残せたと思います。 ● ロボット作りにとことん拘り、優勝を勝ち取った「OmniZero.7」を徹底解説 「OmniZero.6」はよくできたロボットだったので、このままモーションを作り込んだり、操縦をとことん練習することで「ROBO-ONE」優勝を目指すことができたかもしれません。でも私の得意な分野は「ロボットを作ること」なので、そっちで勝負がしたくて、更に強いロボットを作ろうということになりました。また、過去の「ROBO-ONE」では足裏の寸法規制があり、5kg以上の重量のロボットが作りにくい状況だっだのですが、それが緩和されたことも追い風になりました。しかし、更に重量のある強いロボットを製作するには「ROBO-ONE」での重心規定をクリアしなければなりません。例えば、足裏を重くして倒れにくくするのは駄目。腰の軸よりも上に重心を置かなければなりません。そこで、重いものをなるべく上に配置しました。膝はダブルサーボにせず、軽いサーボを下肢へ、重いサーボを脚上部に配置しました。同時に、脚を軽くすることで股関節のサーボへの負担も軽くできます。また、ここでもサーボの外から1/3減速させることで、トルクが通常の3倍ぐらいになる「長穴式減速機構」を採用しています。ただし、可動範囲が狭くなるのでどこでも使えるわけではありません。腕の軸構成ですが、キープコンセプトで大型化。肩ピッチや肩ロール、肘曲げはオーソドックスなものですが、グリッパーを搭載しています。
さて重量についてですが、これまでの私のロボットではサーボ重量がロボットの重量の約半分というところでした。ところが、今回はサーボ全部の重量が約5.2kgだったのでロボットの重量はせいぜい9kgぐらいを目標にしていたのですが、結果的にはなんと18kgぐらいになってしまいました(笑)。やはり大型化すると、フレームなどの重量も大きく変わってくるのでしょうね。 あと、このロボットは膝にバネを入れています。これによって屈伸時の自重が軽減されたり、ジャンプ力が上がります。ただし、ジャンプ力を高めようとバネを強くしすぎると、逆に屈伸運動の自重が増えてしまいます。加えて、首の部分は固定されているように見えますが、実は耐衝撃用のバネを装備しています。転倒したときに5~10度ほどバネで傾き、衝撃を吸収するような仕組みになっています。これまで「ROBO-ONE」も含め何度も転倒していますが、機構やフレームなど内部の破損は一度もありませんでした。
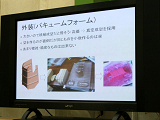
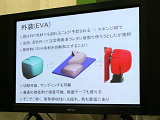
外装に関しては、積層成形だとこの大きさと重量に対して強度が足らないので、「バキュームフォーム」を採用しました。まず木型をつくって、温めた樹脂板を押し付けて、真空で引くという製法です。複雑なフォームや大量生産には向かないですが、少量生産には丁度いいです。肩の外装に関しては、よく衝突する部分なのでスポンジ状の「EVA」を初めて採用しました。お風呂場のマットなどに使われている素材です。切削ができたり接着剤で固定できたり、軽量ということもあって、なかなかいい素材ではないかと思います。赤い色は自分で塗料を買ってきて着色しました。
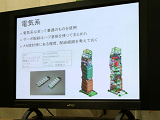
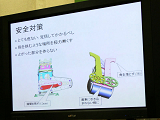
電気系統はわりとオーソドックスなもので、シリアルサーボを使っているのでハブ基盤で並列に繋いでいます。あと、これまで後になって配線に悩むことが多かったので、今回は設計段階から配線経路に配慮しました。ここまで大きくなると安全対策も重要になってきます。しゃがんだ時に指を挟まないよう、すき間を作ったり、角のある部分や尖っていた部分は丸くしたりといった工夫をしています。 というわけで、皆さん「そんな重いロボットやったら、そら勝つやろ!」と思われるかもしれませんが(笑)、優勝できて嬉しいです!
● これまでの試行錯誤と大会経験から導かれた前田流「ロボット作りのコツ」とは 私が考える「設計のコツ」は、「徐々に設計していく」ということ。これに尽きると思っています。どうしても一部だけ先に作りこんでしまいたくなるものですが、他の部分に着手したとき、先に作りこんでしまった部分を再び設計しなおさないといけないという場合が出てくるので、二度手間にならないよう、いろんな箇所を同時に少しずつ始める。これが一番のコツだと思っています。あとは段階を決める。例えば、大きさを決めた段階、どんなサーボをどこに使うかを決めた時など、ある時点で決めたことに従って全体を設計、また次の段階で決めたことを元に徐々に設計していきます。先ずしなければならないことは、「箱決め」。私はもともとゲーム業界にいまして、ゲームだとキャラクターができる前に、通称「豆腐」と呼ばれる白い四角形を代わりに置いて、全体のプログラムを作っていきます。先になめらかな曲面など細かい部分を作り込むと、後からズレてしまったりするからです。これはロボットでも同様で、まず最初に大まかな「箱」を決めます。大まかなフレーム形状や、膝など大きく負担のかかる場所の可動範囲などをゆっくり検討します。外装や配線もある程度は考えておいたほうがいいのですが、後まわしになってしまうこともあります。この時点である程度干渉のチェックをしておいて、その先に進めるようにしておきます。
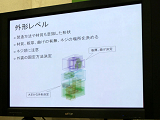
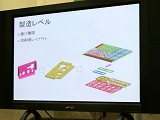
次に外形のレベル。ここはどんな素材を使って、どんな製法で作るのか。ネジの頭にも気をつける必要があります。動かした時に意外とネジの頭が当ってしまうことがあるので、できればこの時点でどこにネジをつけるか考慮しておいたほうがいいでしょう。そして、「箱」を基に全身それぞれの部分の「形」を決めていきましょう。 次にやっとそれぞれの部品へと落し込んでいき、製造レベルへと移行します。どこにどんな穴開けが必要なのかを検討したり、曲げが必要な部品は、展開を起こします。もしこの時点で「ハコ決め」など前の段階がしっかり行なわれていないと、部品をまた作りなさなければならなくなります。
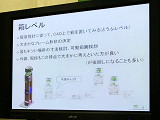
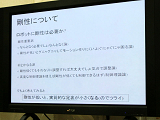
次は重要な「剛性」について。剛性はロボットにとってあまり重要ではないと考える人もいるようですが、剛性は大事な要素だと私は考えています。実際にロボットを作ってみるとわかるのですが、剛性が低いとぐにゃぐにゃして作りにくい。ちょっと抽象的な表現ですが、中にはぐにゃっとしていても微調整でなんとかなると言う人もいますし、柔軟さを味方につけるというような理論も存在しています。でも、私は「剛性が低いのは足裏が小さいことと同じ」だという考えに至りました。 例えばマイクスタンドは、どこまで傾ければ倒れるか。脚の端まで重心が来るまで倒れません。これがロボットのあるべき姿だと思います。もしこれが剛性の低いものだったら、底にガタがあるのと同じ。外力を加える前、つまり最初から土台がズレてしまっているわけです。すると、少しの外力で簡単に倒れてしまう。つまり剛性が低いほど、足裏が実際のサイズより小さくなった状態と同じというわけです。
あとは、参考までに「よくない設計」の例をまとめてみたいと思います。「配線を通す場所がない」配線はCADでは描きにくいので、最後に現物を見ながら考えようと思ってしまうものですが、最終的に配線のスペースが全くなくなってしまう場合がよくあります(笑)。これには気をつけましょう。 「バラさないと配線が通せない」。これもよく起こります。組み立ての時あらかじめある部分に配線を通しておかないと後から通らないという設計だと、後から配線を追加できなかったり、メンテナンスも大変になってしまいます。 「配線スペースに余裕がない」。配線スペースの確保も重要です。10mmぐらいのスペースがあると結構楽なのですが、いろいろ凝って作っているといつのまにか2mmになってしまったりする。すると、摩擦で断線が起こったりしてしまいます。ドライバーが入るスペースを設けることも大切です。「コ」の字型の部品なんかでよくあるのですが、曲げて組み立てるまで何の疑問もなくて、いざネジを締めようと思ったら全然届かないということがあります。 「あらかじめ○○しておかないと、○○できない」。例えば「あらかじめネジを入れておかないと、後からは入らない」などという状態がよく起こりますが、こういうのはよくない設計だと思います。 「ネジの頭が当たる」。これは、「大丈夫!」と思い込んでいてもロボットを1機作る度、だいたい一度は起こります(笑)。CADでネジを描くのは面倒なので、皿ネジに逃げたりするのですが、できれば設計でクリアしておきたいですね。 「ネジが緩みやすい」。意外と意識していない人も多いかもしれませんが、ネジがゆるむと剛性が低いのと同様で、ガタが出てしまいます。ネジをロックする方法もありますが、ネジの径もまた重要です。 「指をはさみやすい、ケガしやすい」。折角ロボットをつくってもケガをしてしまうと、いい気分ではないですよね。やはり、安全性にも配慮したいところです。 「壊れ易い」。構造の弱さもありますが、サーボが弱ってしまったり、サーボ内部が故障しやすいといったケースもあります。その場合サーボの選択が合っていないのかもしれません。 そして最後に……「時間がない」。設計の話じゃないですけど、よくある話ですよね(笑)。ロボットを作っている人なら誰しも経験があるかもしれません。というわけで、配線やネジ、ドライバーのスペースなどに気をつけながら、時間にゆとりを持っていいロボットを作りましょう! ● ロボット大型化時代の到来を実感させる「OmniZero.7」のデモンストレーション 以上、約1時間という短い時間ではあったが、前田氏のロボット作りの変遷からこれまで蓄積したノウハウ、新型ロボットの紹介までぎっしりと凝縮された内容だった。同時に「ロボプロステーション」ならではのリラックスした雰囲気の中、時折ユーモアも交えながら行なわれた前田氏の講演はエンターテインメント性も高く、会場に来ていた少年たちも夢中で耳を傾けている様子だった。
■URL ロボプロ http://www.robo-pro.net/ ヴイストン http://www.vstone.co.jp/ ■ 関連記事 ・ ヴイストンの初心者向けイベント「ロボプロステーション vol.15」が開催 ~自作ロボット講座やバトル大会も(2008/10/21)
( 新町新地 )
- ページの先頭へ-
|