記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
機械週間(メカウィーク)市民フォーラムレポート |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
日本機械学会は8月7日、横浜市開港記念会館において「機械の日」の記念行事として、記念講演および、機械遺産認定表彰式、ジュニア会友による作文コンテスト表彰式、年次大会市民フォーラムを開催した【写真1】【写真2】。 この機械の日は、機械の意義や役割を広く社会とともに考え、人と機械のふさわしい関係を模索するために、日本機械学会と産官学が協力して制定したもの。8月1日から7日の1週間は「機械週間(メカウィーク)」となっている。本稿では、市民フォーラム「輝ける機械工学と未来の夢」の内容についてレポートする。
● 自動車メーカーとしての環境・エネルギーに対する取り組み まず年次大会委員長の宇高義郎氏(横浜国立大学教授)【写真3】による開会挨拶のあと、本田技術研究所の川鍋智彦氏(専務取締役)が登壇し、「自動車と環境・エネルギー」をテーマに講演を行なった【写真4】。機械が動くにはエネルギーが必要であり、環境問題はますます重要になっていることは周知のとおりだろう。特に自動車は個人の移動手段として利便性が高く、今後も保有台数の増加が予想されるため、環境・エネルギーも筆頭となる重要課題だ。川鍋氏は自動車メーカーの立場から、この課題に対する取り組みを示した。問題提起として、これまでの環境・エネルギーの課題の変遷に触れた。 日本では高度経済成長とともに自動車が爆発的に増えた。排気ガスの問題が社会問題としてクローズアップされ始め、各自動車メーカーによって有害成分を削減する取り組みが始まった。また海外では、1970年に米国で大気汚染防止法として有名な通称「マスキー法」が制定された。この法律は1975年以降に製造する自動車の排気ガスに含まれる有害物質(CO、HC)を10分の1に低減し、さらに1976年以降に製造する自動車の窒素酸化物(NOx)も10分の1にするというものだった。 これに対応すべく、自動車各社は総力をあげてクリーンエンジンの開発に着手した。ホンダは1972年に世界で初めてマスキー法をクリアしたCVCCエンジン【写真5】を開発し、脚光を浴びた。翌年にはCVCCエンジンを搭載した初代シビックを発売した。最近ではガソリン車の排気ガス法規制が進み、かつての規制レベルの100分の1から300分の1ぐらいまで低減できるほど向上したという。これらの排ガス低減の実現には、触媒を利用してCOやHCを酸化する方法がとられた。
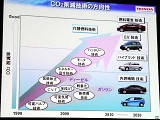
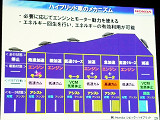
現在、排気ガスの問題はかなり改善されたものの、次に問題となっているのが地球温暖化の現象だ。温室効果ガスの影響で、ここ50年で平均気温と海面が急上昇し続けている。CO2の発生を抑えるために自動車産業は重要な役割を担っている。そのため、国内の燃費規制値を2000年基準で平均20%まで向上させる「2010年規制」から、さらにこれを30%ほど向上させる「2015年規制」に向けて、取り組みを強化する方向だ。これらの燃費規制をクリアするには、ディーゼルエンジン、電気モーター、ハイブリット化、燃料電池といった代替燃料などの技術が必要になるという【写真6】。 とはいえ、川鍋氏は「燃費の向上はエンジン効率だけでなく、自動車全体のエネルギー消費から考えるべきだ」という。たとえば自動車の走行抵抗、エアコン・ヒーターといった空調関連機器、ヘッドライト・パワステなどの電力関連機器からもエネルギーが消費されるからだ。また、肝心のエンジン効率を高める技術には、可変バルブ技術や可変気筒技術などが確立されている。たとえば、低燃費で力強くクリーンな走りを実現する同社の「i-VTEC」(intelligent-Variable valve Timing and lift Electronic Control system)は高性能エンジン技術の中核として、さまざまな車種で展開されている【写真7】。 一方、ガソリンエンジンに比べてディーゼルエンジンのほうは2~3割は燃費がよいものの、排気ガスや騒音・振動・加速などの問題があった。川鍋氏は「乗用車用としてのディーゼルエンジンは欠点が多かったため、日本では最近あまり見かけなくなったが、1990年代半ばからヨーロッパではディーゼルエンジンを改良して問題を解決しており、現在は半数ぐらいがディーゼルエンジンになっている」という。ホンダは新しいクリーンディーゼルの試作機をつくり、国内での普及を視野に開発を進めているところだ【写真8】。
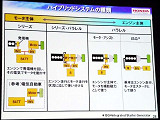
またハイブリッド車は、エンジンとモータを利用して効率よく走行するクルマとして期待されている。燃費がよく排ガスも少なく、低騒音で発進性能もよい。しかし、エンジンとモータを搭載するため、どうしても部品点数が多くなり、構造が複雑で重量も増えてしまう傾向がある。また、ハイブリッド車と一口に言ってもいろいろな種類がある【写真9】。モータ駆動が主体の「シリーズ方式」と、エンジンが主体になる「パラレル方式」、その中間としてエンジンとモータを状況に応じて使い分ける「シリーズ・パラレル方式」がそれだ。電気自動車に近いモータ主体のものほど環境的に優しくCO2が削減できるが、バッテリが大きくなるという欠点もある。 川鍋氏は具体的にハイブリッド車がどのような動きをするのか、パラレル・ハイブリッド方式のシビックを例に説明した【写真10】。発進加速・加速・急加速時にはエンジンとモータ(アシストとして利用)を使い、緩加速・高速一定走行時にはエンジンを使用する。低速一定走行時には、気筒を止めてモータのみで動かす。また停止時の減速にも気筒を休止し、エネルギー回生を行なうことで、充電に使用するというかたちだ。 さらに次世代エネルギーも重要だ。現在のところエネルギー源は化石燃料に頼っているが、将来は枯渇することが予想される。そこで再生可能なエネルギーを活用していかなければならない。川鍋氏は「脱化石燃料とCO2排出量の削減はセットで考えていく必要がある。今後、再生可能エネルギーを利用する場合は、電池や水素を中心としたものになるだろう」と説いた【写真11】。
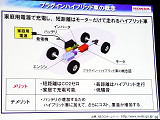
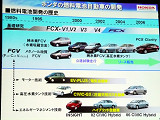
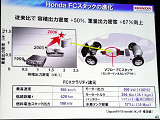
さらに最近注目されている技術としてプラグインハイブリッド車についても紹介した。これは家庭用電源で充電し、短距離はモータで走れるクルマだ【写真12】。短距離間はモータ走行のため、低騒音でCO2の排出はない。長距離区間の場合にはハイブリッド方式で走行する。モータ走行は時速10kmぐらいの速度だが、通勤などには便利だ。ただし余分にバッテリが必要になるため、重量が増えるというデメリットもある。 再生可能エネルギーとして、もうひとつ注目されているのがバイオ燃料だ。バイオ燃料は生物体(バイオマス)から生産されるアルコール燃料や合成ガスのこと。植物が取り込んだCO2を燃料にして、クルマがガスを排出するため、理論上はカーボンニュートラルであり、CO2排出量は「差し引きゼロ」という理屈から、ガソリンエンジンやクリーンディーゼル用途などで開発が進められている。ただし最近は原料が食料と競合することが問題になっている。そこで食料ではなく、廃材などから燃料ができないか研究されている。 このほかにも、将来の技術として期待されるものとして、燃料電池車(FCV:Fuel Cell Vehicle)がある。これは空気中の酸素と水素を使い、「水の電気分解」と逆の反応によって発生させた電気でモータを動かす仕組み。FCVが外に出すのは水だけであるため、究極のエコカーと呼ばれている。もともとホンダのFCV開発の歴史は古く、基礎研究は1980年代までさかのぼるという【写真13】。1999年に純水素FCV(水素吸蔵合金)とメタノール改質FCVの実験車を公開し、ここから同社の「FCXシリーズ」がスタートした。 2000年には公道試験走行を実施。2001年に純水素FCV(高圧水素タンク)を採用し、航続距離を飛躍的に伸ばした。そして2002年12月には日米同時で燃料電池車のリース販売を開始。現在は、最高速度160km/h、航続距離620kmの最新型「FCX Clarity」まで進化を遂げている。FCX ClarityのFCスタックは、従来比で容積出力密度が50%、重量出力密度が67%も向上しているという【写真14】。FCVは水素を利用するため、そのインフラも重要となる。そこでJHFC(水素・燃料電池実証プロジェクト)によって、首都圏や中部・関西地区に水素ステーションを設置、実証試験も始まっている。
最後に川鍋氏は現行技術のまとめとして「ガソリンエンジンは排ガス対策が進んだもののCO2排出に課題がある。ディーゼルエンジンはクリーン化にまだ課題が残る。ハイブリッド方式は重量・コストなどに問題がある。プラグインハイブリッドはCO2削減の効果は大きいがコストがまだ高い」とした。そして、地球温暖化と化石エネルギーの枯渇に対応していくために「省燃費技術の開発と普及に加え、電気・水素・バイオ燃料などの再生可能エネルギーに対応した燃料電池自動車や電気自動車の技術開発が重要になる」と述べ、講演を終えた。 ● ミクロ決死圏の世界も夢じゃない!? ここまで進んだマイクロマシン
マイクロマシン技術は、1980年代後半から半導体製造のフォトリソグラフィ技術によって、マイクロギアなどの可動機構を製作できるようになったことで大きく開花した【動画1】。フォトリソグラフィは写真と似た原理で、大量生産ができ、加工精度がよいというメリットがある。感光性樹脂に設計図となるマスクパターンを転写して、そのパターンを利用して微細な加工を行なうものだ。マイクロギアのような部品を作る際には、可動部を支える犠牲層などをエッチングで除去してから最終的に取り出す【写真16】。
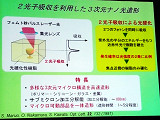
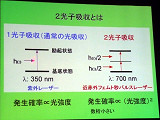
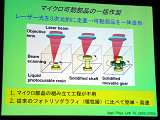
このような従来のフォトリソグラフィ技術のほかに、現在もう1つ普及している造形技術がある。それは3次元CADの断層データを用い、光で硬化する樹脂を立体的に積層して部品をつくる「光造形法」と呼ばれるもの。この技術をマイクロマシン分野に応用したのが名古屋大学の生田幸示教授で、1990年代前半に世界初の「マイクロ光造形法」を開発し、直径50μmのマイクロコイルなど、立体的なマイクロマシンの製作に成功した。 一方その当時、大阪大学河田研究室では3次元光メモリの研究を進めていた。3次元光メモリは、光を当てると焦点近傍部で屈折率が変わるフォトポリマーなどを利用し、深さ方向へ多層的に3次元の書き込みを行なうもので、記録容量を飛躍的に高められるデバイスだ。たとえば100層に情報データを記録できれば、単純に容量は100倍になる。ここでフォトポリマーでなく、前述の光硬化性樹脂を使えば、レーザー光で焦点部のみを固めて記録ビットをつないだ立体が実現できる。 河田研究室において、丸尾氏は光硬化性樹脂によるビット記録の研究を担当した。「当時は光硬化性樹脂を固めるために紫外線レーザーなどが一般的に用いられていたが、近赤外フェムト秒パルスレーザーと呼ばれる高強度レーザーが登場し、これを用いて2光子吸収法による微細な分解能での記録法を研究した」という【写真17】。 ちなみに2光子吸収とは、強い光が物質に当たると2個の光子が同時に消滅して、そのエネルギーの和に相当する高い準位に1個の電子が励起される現象をいう(通常は1個の光子に対して1個の電子が励起される)。2光子吸収が起きると、その吸収は光強度の2乗に比例するようになり、物質内部の特定の微小空間(焦点部分)だけを選択的に励起できるようになる【写真18】。つまり、より分解能の高い加工ができることを意味する。 現在、2光子吸収法による3次元ナノ光造形法は、ポリマー、シリコーン、ガラス、金属など多様な材料で高速造形が可能になり、加工分解能もサブミクロン単位まで対応できるという。レーザー光を3次元的にスキャンすることで、マイクロ可動部品を1分から5分程度で一括で製作することも可能だ【写真19】。さらに光硬化性樹脂を材料とする場合、フォトリソグラフィのように犠牲層をつくる必要がないというメリットもある。「樹脂の粘性が高いため、硬化した部分が浮いた状態になり、そのまま製作できる」と丸尾准教授は説明する。
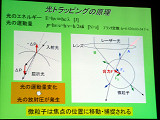
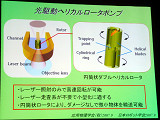
そして、この光硬化性樹脂で製作したマイクロマシンがさらにユニークな点は、光子の運動量の変化で動くことだ。光を物質に当てると力が働く(放射圧)ことは19世紀半ばにマクスウェルの電磁理論によって証明されており、これをマイクロマシンの世界でも利用するというアイデアだ。 たとえば強度1mWの光ではpNレベルの微力しかないが、直径20μmのポリスチレン粒子を水中で動かすには、これでも十分な力となる。実際にレーザーをレンズで集光させると、微粒子が焦点に引き寄せられて捕捉される「光トラッピング」という現象が起きるそうだ。この原理を用い、レーザー光でマイクロマシンを動かすという【写真20】。 丸尾准教授は、この2光子吸収法による3次元ナノ光造形法で製作した「光ピンセット」【動画2】や「光駆動マイクロポンプ」【動画3】を、液体中でレーザー光によって非接触で操作できる様子を紹介した。光ピンセットで1個の細胞をつかんだり、マイクロポンプで1pL以下の超微小流量を制御できるようになる【写真21】。 また、マイクロ領域で支配的になる粘性力を活用した「光駆動ロータポンプ」も開発したという【写真22】。これは有限要素法を用いて、流路に逆流が生じない最適形状に設計したものだという。 ただし、これらはレーザー光をミラーで動かしてロータをまわす必要がある。そこで、さらに改良を加え、光をロータの中央部に照射するだけで動く「ヘリカルロータポンプ」も開発したそうだ【写真23】。円筒状のロータ内部に向きが反対になる2つの螺旋状の羽を付けることで、300~500rpmという高速回転が可能になる。
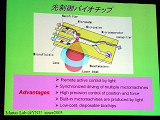
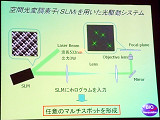
さて、このようなマイクロピンセットやマイクロポンプを開発することによって、将来どのようなことができるのだろうか。丸尾准教授は「光で駆動するバイオチップをつくろうとしている」と将来の展望を示した【写真24】。医療診断などで用いられるマイクロ流体回路に、可動部品であるポンプやピンセットなどを組み込み、光で遠隔操作して化学分析や細胞操作を行なうという発想。まさに映画「ミクロの決死圏」のような世界だ。 さらに面白い点は、光駆動バイオチップに載った複数台の可動部品を同時に独立制御しようと考えていることだ。この場合、各部品を動かすためにレーザー光も複数分必要になる。そこで空間光変調素子(SLM)とホログラム(位相分布を与える)を使って焦点を分割し、マルチスポットをつくることで、多数のマイクロマシンを同時に操作する駆動システムを考案したそうだ【写真25】。 実際にホログラムを使ってレーザー光を分割して物体を制御する研究が海外で研究されている。手の動きをモーションキャプチャして、その動きに応じてマイクロハンドで微粒子を複数同時に操作する「光の手」のような実験も行なわれている。丸尾准教授は、このような技術を使えば「将来的に自分の思い描いたとおりにマイクロマシンを操ることもできるようになるだろう」という。
現在、丸尾准教授が所属する横浜国立大学では「人に学び、人を超え、人とともに生きる未来メカトロニクス」をテーマに、快適な未来社会を育むモーションテクノロジーを創生すべく、さまざまな学際プロジェクト研究を推進しているところだ。 また、文部科学省グローバルCOEプログラムも採択された、情報通信(ICT)による医工融合イノベーション創生にも着手。こちらはボディエリアネットワーク(BAN)によって、体に付けた生体センサーでバイタルサインを監視したり、体内にインプラントした医療デバイスを遠隔制御する技術などを推進するもの。さらに体内で動く3次元マイクロシステムを素早く製作して機能評価を行なう都市エリア産学連携促進事業も進められているという。 ● 単純なように見えて深遠なる昆虫の本能を模したロボットたち
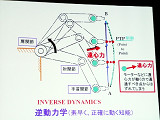
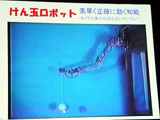
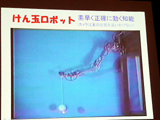
当初、三浦学長は東京大学やNASAでロケットを研究していたが、「人間が何気なく行なうことができることでも、機械で実行するのが難しいことをロボットでやろう」と思い立ち、ロボットの研究を開始したという。いまから25年以上も前のことだ。人間は無意識のうちに自身の知能を使って、さまざまな作業が行なえる。このような知能を実現すべく製作した三浦研のロボットは「けん玉ロボット」や「棒立てロボット」などユニークなものばかりだ【写真27】。 たとえば、人がけん玉をする際には、自分の手首、肩、肘などの関節をうまく動かしてボールをキャッチしている。これら一連の動作を行なう時間はわずか0.6秒という短時間。ロボットに同じことをさせようとすると、指先位置を高速でPTP制御しなければならない。とはいえ、モータには遠心力が掛かるし、伸ばしたアームにはコリオリ力も生じるため、計画軌道どおりに動かすことができなくなる【写真28】。
そこでモータに掛かる遠心力などを打ち消すように、逆動力学から関節に加えるべきトルクを計算し、素早く正確に動くような知能を備えた「けん玉ロボット」を開発した【写真29】【動画4】。このロボットは96%の成功率でけん玉をキャッチできたという。
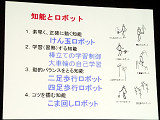
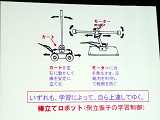
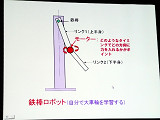
次に三浦学長が着手したのは、学習(習熟)する知能をもつロボットだった。棒たてや鉄棒の大車輪をするロボットを製作した。いずれも学習によって自ら上達していくロボットで、前者は棒を安定させて立てる「倒立振子」による学習制御のはしりとなるもの【写真30】。一方、後者の大車輪ロボットは、上下半身に対応する2つのリンクを接続するモータの動きによって、反動力を発生させる。モータをどのようなタイミングで動かし、どの方向に力を入れるかを学習させることがポイントになったという【写真31】【写真32】。
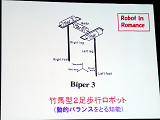
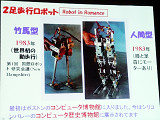
倒立振子ロボットができた頃、これを2本つなげれば竹馬型の二足歩行ロボット【写真33】【動画5】ができるのではないかと思い立ち、動的バランスをとる「人間型の二足歩行ロボット」【写真34】や「四足歩行ロボット」【写真35】の研究へと発展していったそうだ。 1983年にニューハンプシャーで開催された第1回国際ロボット研究会議において、世界初の動歩行ロボットを発表、さらに現在の二足歩行ロボットのルーツとなる人間型二足歩行ロボット「Biper4」も開発。これは現在、シリコンバレーにあるコンピュータ歴史博物館に展示されているという【動画6】。
さらに、人の動作を見てコツをつかむ「こま回しロボット」も開発した【写真36】【写真37】。これは人間の動作をカメラで観察し、それを解析して、プログラミングを行なってロボットの動作に反映させるもの。 しかし、三浦学長は「よくよく考えてみると、これらのロボットはすべて人間が動作の解析などを行ない、人間がつくったプログラムに従って動くものだ。学習するといっても、学習するためのプログラムを与えられた自動機械であって、本当のロボットとはいえないのではないか」と感じたという。
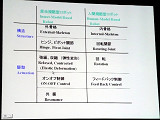
そこで次の段階として、機械は意識を持ち得るか? ということを考えたそうだ。いろいろと思案しているうちに、めぐり合ったのが何と「ゴキブリ」だったというから、とても面白い話だ。 三浦学長は「ゴキブリは人が近づくと危険を察知して素早く動き、とても知的な生き物のように見えた。しかし、いろいろ調べていくと、その動きは意識や知能に由来するものではなく、反射運動であることが分かった。どの触覚が感じたら、どの筋肉が動くかというということ。それなら、そういう機械をつくればよいと思った」と当時を振り返る。そこで昆虫ロボットの開発がスタートしたのだという。 そして「昆虫に学べ」を合言葉に、昆虫規範型ロボットを広めようと考えていたときに、ちょうどマイクロマシンブームが到来した。国家プロジェクトとして研究が始まった2000年ごろのことだ。三浦学長もマイクロマシンセンターの技術委員長として研究に携わり、半導体製造プロセスを応用したマイクロロボットを開発した。昆虫ロボットは人間型ロボットと根本的に異なる点が多い。 たとえば、昆虫ロボットの構造は外骨格であり、なかに筋肉がある。関節もヒンジ・ピボット式でジョイントされている。また駆動方式も弛緩・収縮(弾性変形)、オンオフ制御、共振で行なわれる【写真38】。 「ハエの羽ばたきは、背縦走筋や背腹筋の弛緩・収縮によって、背板が上昇・下降することで関節部の翼が動く。トンボの場合は、飛行速度によらず羽ばたきの振動数は一定だが、前後の羽の位相差によって速度をコントロールしている。昆虫は6本足のうち3本を交互に動かすことによって、素早く動くことができる。アリの場合も交互3脚歩行で、重心を前に持っていき、重心が3本の足からなる3角形から外れた瞬間に、次の足を出す」【写真39】と三浦学長。
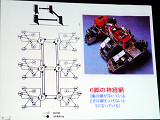
マイクロマシンの昆虫ロボットをつくる際に、半導体製造技術を利用すると平面製作が基本になる。そこで平面から立体構造をつくるために「折り紙構造」を考え付いたという。立体を構成する展開図をつくり、それをあとから折り紙のように組み立てるという日本伝統のアイデアだ。 またマイクロマシンを駆動する方式には、静電力、交流磁界、形状記憶合金、共振などがある。三浦学長は、マイクロ羽ばたき機構を利用して、静電力や磁界で動く「蚊ロボット」【動画7】や、共振で動く「マイクロ蟻ロボット」【動画8】、6脚の神経網の構造を持つ「6本足昆虫ロボット」【写真40】、障害物を乗り越えたりジャンプする「コオロギロボット」【動画9】など、過去に製作したユニークな昆虫ロボットを披露した。
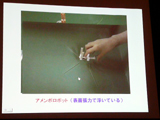
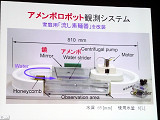
このような昆虫ロボットの中で特に印象的だったのが、水面をスイスイと泳ぐ「アメンボロボット」だ【動画10】。これは足にマイクロ加工で毛を付けて表面張力で水面に浮く構造になっている。また、実際のアメンボのように滑り移動だけでなく、飛んで跳ねて移動することが可能だ【写真41】。この研究のためにアメンボを観測する専用システムも家庭用の「流しソウメン器」を改良して製作した【写真42】。また、振動させる脚によって進行方向が決まる「変形アメンボロボット」【写真43】も開発している。
このほかにも昆虫の「群知能」に関する研究なども行なっている。蟻の行列の様子などでも分かるが、個々の昆虫は本能に従って単純な行動をしているものの、全体で見ると秩序ある動きをしている。そこで、複数の昆虫ロボットをつくり、群行列を発現したり【動画11】、一定の場所に餌を集めたり、巣に持っていく本能を持つロボットなども研究しているという。 さらにユニークな昆虫ロボットとして、実際の昆虫の器官と人工システムを掛け合わせた「ハイブリッド昆虫ロボット」も紹介。これは蚕蛾の雄の触角を取り付けて、雌の蛾を追いかけていくロボットだ【写真44】。以前記事で紹介したような昆虫操作型ロボットと似ているが、こちらは触覚のみを切り取っている点が異なっている。 最後に三浦学長は、「昆虫は単純だが知能的に見える。ここまで生き延びてこれた理由は、神様が与えてくれたこれらの機能によるところが大きい。MITのRodney Brooks氏(人工知能研究所所長)がいうように、本能のままに走り回る“Intelligence Without Reason”があり、“思考なき知性”ともいえる。それと同様に、ロボットにも知能や心は存在しえないだろう」とし、「<ある>と感じられるロボットの心は、私たち人間が、いわば<虚焦点としての心>を投影しているからにほかならない」という、哲学者・黒崎政男氏の言葉を引用して講演を終えた。
これら3つの興味深い講演のあと、ホンダの「ASIMO」のデモンストレーションも行なわれた。こちらのデモは、大会委員長の宇高氏と掛け合いをしたり、機械学会のイベント用にカスタムチューニングされたものだった【写真45】【写真46】【動画12】。人間の子供が中に入ってるようなASIMOのデモを見ながら、この20年間のロボットの進化にあらためて感銘を受けると同時に、近い将来この講演内容のようなマイクロロボットたちが、私たちの世界をさらに変えていくだろうという大きな期待も膨らんだ。
■URL 日本機械学会 http://www.jsme.or.jp/ 機械の日 http://www.jsme.or.jp/kikainohi/index.html ■ 関連記事 ・ 人間型ロボットハンドを手話やリハビリ用に応用 ~日本機械学会 関東支部埼玉ブロック「機械の日」特別講演会より(2008/08/21)
( 井上猛雄 )
- ページの先頭へ-
|