エイチ・ピー・アイ・ジャパン(HPI)の「G-Dog」は、精悍なボディが魅力の犬型四足歩行ホビーロボットだ。前編で一通り組み立て手順を紹介したので、その続きとして、ソフトウェアのインストールや初期設定、トリム調整、サンプルモーションの実行、オリジナルモーションの作成手順を解説する。
● モーションエディタを利用してトリム調整を行なう
組み立てが終わったら、まず、サーボモーターのトリム調整(トリミング)を行なう必要がある。トリム調整とは、サーボモーターの初期位置を調整し、G-Dogの基本姿勢を整える作業である。正しくトリム調整を行なわないと、サンプルモーションをうまく実行することができなくなる。二足歩行ホビーロボットではサーボの数が多いため、トリム調整作業がなかなか大変だが、G-Dogではサーボが9個しかないのでトリム調整も容易だ。また、G-Dogのサーボモーターはあらかじめ原点設定が行なわれているので、初期位置の修正もごくわずかで済む。トリム調整は、付属CD-ROMに収録されている「モーションエディタ(RPU-11ME)」(以下モーションエディタ)を利用して行なうので、最初にモーションエディタをインストールする必要がある。モーションエディタをインストールしたらサンプルデータも必要になるので、続けてサンプルデータもインストールしておこう。また、オプションの無線コントローラを装着していない場合は(無線コントローラについては後述する)、「RRCエミュレータ」もインストールしておく。
|

|
|
付属CD-ROMをドライブに入れると、インストーラが起動する。まず「モーションエディタ」をインストールし、次に「サンプルデータ」をインストールする。無線コントローラを装着していない場合は「RRCエミュレータ」もインストールしておく
|
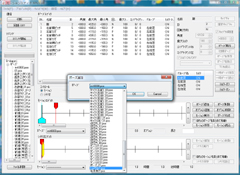
まず、モーションエディタを起動し、G-Dog用のプロジェクトファイルを読み込ませる。次に、メニューバーの「設定」から「環境設定(I)」を選んで、COMポートを指定し、G-DogとPCを付属の通信ケーブルで接続する。通信ケーブルは、シリアル(RS-232C)端子対応なので、シリアル端子がないPCの場合は、USB-シリアル変換アダプタを利用すればよい。G-Dogの電源を入れてG-Dogが直立したら、「接続」ボタンをクリックし、PCとG-Dogとの接続を確立する。接続が確立したら「トリミング開始」ボタンをクリックして、トリミングモードに入り、マニュアルに従ってトリミング調整を行なう。腹→前脚→後脚の順番でトリミング調整を行ない、完了したらトリミング情報をプロセッシングユニットのRPUに転送する。

|

|
|
モーションエディタを起動したら、まずG-Dog用のプロジェクトファイルを読み込ませる
|
G-Dog用プロジェクトファイルを読み込ませたところ
|

|

|
|
メニューバーの「設定」から「環境設定(I)」を選ぶ
|
G-Dogを接続するためのCOMポートを指定する
|

|

|
|
G-DogとPCを付属の通信ケーブルで接続する。通信ケーブルは、シリアル(RS-232C)端子対応なので、シリアル端子がないPCの場合は、USB-シリアル変換アダプタ経由で接続すればよい
|
G-Dogの電源を入れてG-Dogが直立したら「接続」ボタンをクリックする。接続が完了すると「接続」ボタンが「切断」ボタンに変わる
|

|

|
|
「トリミング開始」ボタンをクリックする。トリミング中は「トリミング開始」ボタンが「トリミング中止」に変わる
|
右側にある角度の欄の数値を上下矢印ボタンをクリックすることで変更して、サーボモーターの位置を調節する。調整が完了したら「トリミング転送」ボタンをクリックして、トリミング情報をRPUに書き込む
|
|
|
|
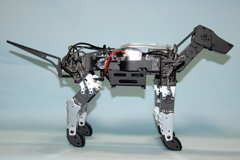
トリム調整前のG-Dog。調整前でも大きくはずれていないが、床に対して脚が垂直になっていない
|
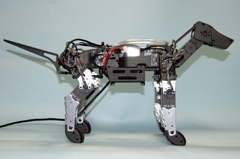
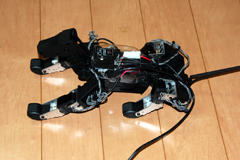
トリム調整後のG-Dog。4本の脚が全て床に対して垂直になっている
|
● RRCエミュレータを利用して、G-Dogを動かす
|

|
|
RRCエミュレータによって、PCからG-Dogを操作できる。オプションの無線コントローラを模したデザインで、各ボタンをマウスクリックするか、キーボードショートカットで操作が可能
|
二足歩行ホビーロボットの「G-ROBOTS GR-001」では、標準で無線コントローラが付属しており、無線で操縦できるが、G-Dogでは無線コントローラは別売りのオプションとなっている。その代わり、「RRCエミュレータ」と呼ばれるコントローラをエミュレートするソフトを利用して、PCからコントロールできる。サンプルモーションも充実しており、前進や後進はもちろん、逆立ちやお座り、おしっこ、駆け足など犬らしいモーションも、G-Dog用プロジェクトファイルに登録されているので、すぐに動かして遊べる。右スティックによるアナログ操作にも対応しており、PCにゲームパッドを接続すれば、ゲームパッドからの操作も可能だ。

|

|
|
COMポートを指定して、「接続」ボタンをクリックすることで、G-Dogとの接続が行なわれる。接続中は、G-Dogのバッテリ残量がバーグラフとして中央に表示される
|
右上の「キーボード設定の表示」にチェックを付けると、キーボード割り当てが表示される
|

|
|
|
【動画】サンプルモーションの前進と後退。デフォルトでは左スティックに割り当てられている
|
【動画】こちらは早足での前進と後退。より大股で歩行する
|

|
|
|
【動画】旋回の様子。その場で素早く旋回が可能
|
【動画】犬型ロボットならではのおしっこモーション。反対側のモーションも用意されている
|

|

|
|
【動画】お座りモーションも2種類用意されている
|
【動画】キックモーション。左右の前脚と後脚の4種類のキックモーションが用意されているので、G-Dog同士でサッカーをやらせるのも面白そうだ
|

|
|
|
【動画】アクロバティックな逆立ちモーション
|
【動画】みごとなダンスモーションも用意されている
|
● オプションの無線コントローラを利用すれば無線操縦が可能
G-Dogは、オプションの無線コントローラ「RRC-T11」と受信機「RRC-R11」を利用することで、無線での遠隔操縦が可能になる。受信機の取り付けも非常に簡単で、お腹の下に装着スペースが用意されているので、そこにはめ込み、受信機からのケーブルをプロセッシングユニットのRPU-11のコネクタに装着するだけで完了だ。
無線コントローラのRRC-T11は、PS2コントローラによく似ており、2つのアナログスティックを備えている。右側のスティックを動かすことで、G-Dogの重心を自由に操れるのも面白い。

|

|
|
オプションの無線コントローラ「RRC-T11」。PS2のコントローラによく似ている
|
RRC-T11とセットで利用する専用受信機「RRC-R11」。コンパクトで軽い
|
|

|
|
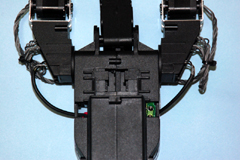
G-Dogのお腹の下に受信機を装着するためのスペースが用意されている
|
RRC-R11をG-Dogに装着したところ
|

|

|
|
受信機からのケーブルをRPU-11の右側面のコネクタに接続する
|
無線コントローラで操作する場合は、RPU-11のモードダイヤルを「F」に合わせる
|

|

|
|
【動画】無線コントローラの右スティックによって、G-Dogの重心を前後左右に動かすことができる
|
【動画】無線コントローラを使えばケーブルがいらないので、G-Dogを自由自在に操れる。倒れた状態からの起き上がりも可能
|
● キャプチャ機能でモーション作成も簡単
G-Dogは、付属のモーションエディタを利用して、オリジナルモーションを作ることができる。ポーズの集合がモーションであり、まずは、モーションの元となるポーズを作る。モーション作成とは、パラパラマンガを作るようなもので、その1コマ1コマがポーズとなる。一般的なモーション作成ソフトでは、サーボの角度を1つ1つ指定してポーズを作っていくが、G-Dogでは、サーボのトルクをオフにして、関節を手で動かしてポーズを作成し、そのポーズをキャプチャできるので、初心者でも簡単にポーズを作成できる。
モーションに必要なポーズを作成したら、モーションエディタのウィンドウ内に、ポーズを並べていくことで、モーションを作成する。ビデオ編集ソフトのタイムライン編集に似た感じで、直感的にモーションを作成でき、ポーズからポーズへの遷移時間の変更も、マウスのドラッグ1つで行なえる。さらに、複数のモーションを並べて、シナリオを作成し、実行させることも可能だ。

|

|
|
G-DogとPCを接続し、モーションエディタを起動して「接続」ボタン→「同期 ON」ボタンの順にクリックする
|
「トルクオフ」ボタンをクリックすると、すべてのサーボモーターのトルクがゼロになり(脱力する)、手で自由に関節を動かせるようになる
|
|

|
|
手でG-Dogの関節を動かし、伏せた状態にする
|
取り込みたいポーズができたら、「トルクオン」ボタン→「キャプチャ」ボタンの順に押して、サーボモーターの角度を読み込ませる
|

|

|
|
ポーズができたらポーズ名を付けて保存する
|
モーションエディタのウィンドウ内の時刻表示カーソル(赤い矢印)をドラッグして、ポーズの遷移時間を決める
|
|

|
|
「ポーズ追加」ボタンをクリックして、追加したいポーズを選択する
|
また、時刻表示カーソルをドラッグして、ポーズを追加していく
|

|

|
|
モーションが完成したら「モーション実行」ボタンをクリックして、モーションを実行させる
|
【動画】しゃがんで伏せてから右前脚を上げて、両前脚を持ち上げるというモーションを作ってみた
|
|

|
|
脚の形状を変更するためのパーツも付属している
|
G-Dogは、一般的な二足歩行ホビーロボットに比べてサーボモーターの数が少なく、組み立てやモーション作成が簡単に行なえることが魅力だ。拡張性も高く、脚の形状を変更するためのパーツが付属しているほか、サーボモーターを追加して首や頭を独立して動くようにすることもできる。
犬型ロボットが欲しいという人はもちろん、ホビーロボットを初めて組み立てるという人にもオススメのロボットキットだ。
■URL
エイチ・ピー・アイ・ジャパン(HPI)
http://www.hpiracing.co.jp/
製品情報
http://www.hpirobot.jp/g-dog/top/index.html
■ 関連記事
・ 石井英男のロボットキットレビュー
エイチ・ピー・アイ・ジャパン「G-Dog」(前編)(2009/01/30)
2009/02/13 15:07
- ページの先頭へ-
|