「Beautoロボコングランプリファイナル」レポート
~電子工作部門の作品も紹介
 |
| Beautoロボコングランプリファイナルの参加者+ヴイストン大和代表とで記念撮影 |
昨年からスタートした、エンカフェが運営するネットコラボレーション型の技術コンテスト「エンジニアアワード」。5日に2009年の集大成の「エンジニアアワード 2009 ファイナル」が東京23区西部にある高円寺プラットフォームで開催され、その中でロボット部門「Beautoロボコングランプリ」の全国大会「ファイナル」も行なわれた。同時に電子工作部門の受賞作品も展示され、一部は開発者によるプレゼンも実施。その両方の模様を併せてお届けする。
●東京・大阪・福岡の3大会の上位選手が集結
Beautoロボコングランプリは、2009年のエンジニアアワードのロボットコンテスト部門の競技。ヴイストンが教育用キットとして販売している車両型の自律ロボット「Beauto Chaser」を利用する(正確には、そのメインパーツであるCPU「VS-WRC003」やモータ「マブチ FA-130」などを利用していればよく、車体は直径220mmの円筒に収まればオリジナルでもいいし、センサーも多数追加してもよい)ライントレース系競技だ。1対1での勝負で、どちらが先にオフライン(上から見て機体のどの部分もライン上から外れてしまう完全なコースアウト状態)することなくゴールできるかを競う内容となっている。もちろん、ロボットを操作してはならず、何らかのセンサーを用いて自律走行することが大前提だ。
8月29日の大阪大会を皮切りに、翌週9月6日の福岡大会、その翌週12日の東京大会と3週連続で地区大会を実施。大阪大会と東京大会はすでに本誌でもレポート済みだ。今回はその上位選手が参加となる。なお、「ネット参加」が可能というのもBeautoロボコングランプリの特徴。遠隔地の参加者が会場まで行けなくても、Beauto Chaserを運営事務局に送ることで、大会に参加できるというわけだ。今回は、福岡大会の準優勝の「シリカゲルまたは食べられません」の製作者のぽてとまよねーずさんが実際にネット参加を行なった。
また、ライントレース系の競技は複数あるが、Beautoロボコングランプリの特徴のひとつが、両方のコースが途中2箇所で交差しているところ。プログラムがまずければ、対戦相手のコースに誤進入してしまうトラップでもあるし、衝突する可能性もある危険なポイントである。もっとも、交差箇所はそれぞれのコースでスタート地点からの距離が異なるため、よほどの速度差がない限りはまず起きないのだが、万が一当たった場合は、遅い方がその場で相手の走行妨害をしたとして即敗退となるルールだ。
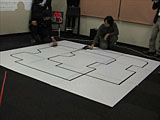
そして今回のコースレイアウトだが、さすがにファイナルというだけあって、どの地区大会よりも難易度が高め。スタートしてすぐ台形型のシケイン(第1~4ターン)があって、その後にカーブ(第5コーナー)。そして右→左の90度ターン(第6・7ターン)が続き、バックストレートとでもいうべき2本ある内の若干短い直線となる。そして左に90度の第8ターンがあり、その先に左→右→右→左のクランク(第9~12ターン)。そして2つ目のカーブ(第13コーナー)があり、メインストレート。そして左への直角ターンの第14ターンがあって、スタート/フィニッシュラインで1周だ。衝突の可能性があるのは、右側のコースのバックストレーと中間、左側のコースの第8ターンとクランクの間。左のコースを速い機体が走り、右のコースを遅い機体が走ると、場合によってはぶつかってしまう可能性があるというわけだ(実際に衝突したら、左側の方が速いので勝者となる)。もっとも、全国大会なので、さすがに衝突するほどの速度差はないものと思われる。
 |  |
| 今回のコースレイアウト。序盤は切り返しが多い | 練習用のミニコース。実はかなり難易度が高く、ヘタすると本コースより上? |
●6選手によるトーナメントが実施
当初は、各地区の優勝者に、最も参加者数の多かった大阪大会の準優勝者を加えた4名での決勝が予定されていたが、枠を増やし、8選手によるトーナメントに変更。大阪と福岡からはそれぞれ優勝と準優勝の選手、地元の関東地区からは4位までの選手ということになった。しかし、残念ながら福岡大会優勝者のFF-LEAGUEさんの「せりかれん」とRobotWaveさんの「ecoloop」は機体調整が間に合わず、棄権となってしまった。また来年、地区大会から参加していただいて、またファイナル進出を目指していただきたい。
トーナメントは6選手の参加となったため、第1試合と第2試合の敗者には第3試合と第4試合に復活枠が設けられる変則ベスト8の形となった。今回の参加者は以下の通りだ。マシン名/選手名で、カッコ内は地区大会の順位(順番は地区大会実施順の上位選手から)。
・風兎2009LT/京大機械研究会OB・OG会(大阪大会優勝)
・1号/チームYODO(大阪大会準優勝)
・シリカゲルまたは食べられません/ぽてとまよねーず(福岡大会準優勝)
・KASSIN DCD/じぇーけーそふと(東京大会優勝)
・ホワイトナイト-K/KUWA(東京大会準優勝)
・磯工ランナー/磯子工業高校(東京大会4位)
 |  |
| トーナメント。第4試合が上から2つ目に位置しているのは、敗者復活枠の関係 | 地区大会の上位選手による白熱した闘いが展開した |
1回戦(準々決勝)第1試合は、東京大会第4位の磯子工業高校(の先生)の「磯工ランナー」対大阪第2位の高校生製作者であるチームYODOの「1号」。機体は、磯工ランナーがBeauto Chaserの内のルール上必要なパーツのみを使用した、ほぼオリジナルの機体。重量増を防ぎつつ車体の横幅を増すため(機体の一部でもライン上にあればオンラインと見なされるので)、前後2枚ずつの翼が左右に広がっていること、前方に細長いことなどから羽を広げた鳥のような形をしている。一方の1号は、名前こそ同じだが、大阪大会とはかなりデザインが変わった。大阪大会でも、タイヤがかなり大きいなどオリジナリティのある機体だったが、今回はさらに変更し、ほぼオリジナル。前後に短くなり、コンパクトな形でまとまっている。大阪大会の決勝で戦った「風兎2009LT」に似た形になっていることから、影響を受けたのかもしれない。勝負は、磯工ランナーが17秒53というまずまずのタイムでゴールし勝利し、準決勝に進出した。1号は残念ながら完走が叶わず、敗者復活枠での「KASSIN DCD」との第3試合に回ることとなった。
 |  |  |
| 磯工ランナー。Beauto Chaserを思いっきり細身にしたような縦長のセンサが前にある機体 | 1号。大阪大会から大幅に機体を改修した模様。もはや「2号」といっていいのではないだろうか | 【動画】1回戦第1試合磯工ランナー対1号 |
第2試合は、東京大会準優勝の「ホワイトナイト-K」対福岡大会準優勝の「シリカゲルまたは食べられません」(以下、シリカゲル)。ホワイトナイト-Kは、Beauto Chaserの上に、PREGOODS JAPAN(http://www.pregoods.com/home/)製「ASOBLOCK」シリーズの入門用「3メカニックロボ25MB」に入っている2体のロボットの内の白色の機体「ホワイトナイト」を乗せているのが特徴。この時点で既に重くて不利なのだが、製作者のKUWAさんは東京大会にはなかったシールドまで装備させ、さらに見た目を重視。ただし、今回はいざとなったらホワイトナイトをパージしての走行も行なえるよう調整したという。
一方のシリカゲルは、ネット参加。ぽてとまよねーずさんの代わりにスタッフがスタートボタンを押すというわけだ。機体は、ほぼBeauto Chaserのままで、センサーの追加などは行なわれている。勝負は、そのスタッフの方が緊張したか、シリカゲルがワンテンポ送れてスタート。それが若干響いたか、途中までは接戦だったが、ホワイトナイト-Kが23秒71で先にゴール。シリカゲルまたは食べられませんは27秒88で敗北を喫し、敗者復活枠で「風兎2009LT」との第4試合に回ることとなった。
 |  |  |
| ホワイトナイト-K。ホワイトナイトがシールドを装備してさらに重量アップ! | シリカゲルまたは食べられません。ボディやタイヤもノーマルで、センサーが追加されている | 【動画】ほぼノーマルの機体同士での対決となった第2試合 |
第3試合は、東京大会優勝のKASSIN DCD対敗者復活枠での1号。KASSIN DCDもボディはほぼオリジナルで、規定の通りにモータやCPUのみがBeauto Chaserのものを使用している。東京大会ではダントツの全勝優勝を決めており、今回は風兎2009LTと並ぶ優勝候補である。勝負は、KASSIN DCDの勝利。カーブや直角ターンでの旋回の際には、直前でブレーキングしており、直線でのスピードが出ているにもかかわらず、オーバーランは絶対にしないという別次元の走りで11秒55。会場からも速い速いと歓声が上がっていた。1号は、調整が間に合わなかったのか、今回もゴールできず。また来年に期待したい。
 |  |  |
| KASSIN DCD。こちらもボディはオリジナル。ノーマルに対して車高が非常に低いから、スーパーカーか | KASSIN DCDの走行中の様子 | 【動画】KASSIN DCDと、敗者復活枠で再登場の1号の対決の様子。KASSIN DCDのメリハリのある走りに注目 |
第4試合は、大阪大会優勝の風兎2009LT対シリカゲル。風兎2009LTはオリジナルのボディで、非常にコンパクトなのが特徴。今回は大阪大会からセンサ部分(前部バンパーの下側にある)が改造され、2個減らして6個にしたそうである。軽量・コンパクト化を図ったようだ。勝負は、風兎2009LTがKASSIN DCDを上回る走りを見せ、10秒51でゴール。シリカゲルは、今回はスタートでワンテンポ遅れるようなことはなかったが、それでも27秒28。残念ながらこれで姿を消すこととなった。
 |  |  |
| 風兎2009LT。センサー部分に手が加えられ、8個から6個に減らして軽量化が施された | メインストレートを疾走する風兎2009LT。流し撮りができるほどスピードが出ている | 【動画】風兎2009LT対シリカゲル。風兎2009LTはコンパクトな車体を活かして、クルクルと進んでいく |
そして準決勝。第1試合は、ホワイトナイト-K対KASSIN DCDの東京大会の決勝戦の再現。ついにホワイトナイト-Kがホワイトナイトをパージして走るかと思われたが、KUWAさんにはノーマルのBeauto Chaserでどこまで挑めるかというコンセプトもあったようで、そのまま出走。KASSIN DCDが11秒66をマークして勝利し、決勝戦一番乗りとなった。ホワイトナイト-Kはかなりギリギリまで攻めたプログラムだったようで、完走ならず。3位決定戦に回ることとなった。
 |  |
| 準決勝第1試合のスタート直前の様子。スタートボタンを押すタイミングも重要 | 【動画】準決勝第1試合のホワイトナイト-K対KASSIN DCDの様子 |
準決勝第2試合は、磯工ランナー対風兎2009LT。1回戦のタイムで比較すると磯工ランナーは厳しいものがあるが、風兎2009LTとて絶対に勝利が約束されているわけではない。ルール上、両車がコースアウトした場合は、制限時間の3分以内なら再スタートが行なわれる。しかし、片方がオンラインで走り続けている場合は再スタートはなく、そのまま試合は続行される。要は、うさぎとカメの勝負で、遅くても勝てる可能性はあるということだ。そこら辺は風兎2009LTの製作者の山口さんもわかっており、完走を重視したプログラムで対応。オフラインになることなく、しかも10秒32というこの日これまでの最高タイムをマークして決勝進出となった。磯工ランナーも17秒12と1回戦を上回ったのだが力及ばず、3位決定戦に回ることとなった。
 |  |
| 準決勝第2試合のスタート直前の様子 | 【動画】準決勝第2試合は磯工ランナー対風兎2009LT。風兎2009LTがこの日のベストタイムを記録 |
●決勝戦はKASSIN DCD対風兎2009LT
いよいよ残すは3位決定戦と決勝戦。まずは3位決定戦、ホワイトナイト-K対磯工ランナーからだ。準決勝までのタイムを比較すると、磯工ランナーの方が上。ホワイトナイト-Kは10秒台が出ていないため、ホワイトナイトをパージする可能性も予想されたが、乗ったまま。やはり名前の由来であるホワイトナイトは重要ということで、そのままで挑むようだ。勝負は、中盤までほぼ差のない拮抗した勝負となる。磯工ランナーが中盤を過ぎてリードしたかに見えた矢先、クランクでまさかのオフライン。ホワイトナイト-Kは第8ターンで若干引っかかったものの、走りきって20秒88を記録。逆転で勝者となった。
 |  |
| 3位決定戦は関東勢同士の対決に。ホワイトナイト-K対磯工ランナー | 【動画】3位決定戦のホワイトナイト-K対磯工ランナー。磯工ランナー優勢と思われたが…… |
そして、決勝戦。KASSIN DCD対風兎2009LTによる、東西横綱対決といったところか。これまでのタイムを見ると、風兎2009LTが1秒ほどリードしており、準決勝と同じタイムを出せれば勝てそうな雰囲気。しかし、1秒しか差がないと、ちょっと何か引っかかったりすると、それでもう勝敗はわからなくなってしまうところである。
一方、KASSIN DCDは、とにかくベストタイムを狙うしかないところ。まさかとは思うが、わざと1秒ほど遅いタイムにして、風兎2009LTサイドを攪乱しようという作戦もありか? さらに、微妙に勝負に影響しそうなのが、走るコース。両者ともに準決勝までとは違うサイドに決まった(ジャンケンで勝った方が自動的に右側となる)。
なお、コースは基本的にどちらも同じルートとなっているが、もちろん手作業でプラダンの上にテープを貼って作成しているため、厳密にはミリ単位の誤差や歪みなどはあるし、プラダンのつなぎ目の位置も当然違うので、人の目ではほとんど同じでも、センサーやタイヤにとっては差があるのは間違いない。そうした違いをものともせずに走れる性能を有した両車であるが、はたして……? 勝負は、一見互角に見えたが、途中からなんとリードが予想された風兎2009LTが遅れだし、KASSIN DCDはこの日の自己ベストとなる10秒79で優勝! 風兎2009LTは13秒41でゴールし、残念ながら2位となった。
一気に3秒以上遅くなってしまった風兎2009LTは、やはりコースが原因かと思われたが、製作者の山口さんによると違うという。いくら途中の段階でタイム上では1秒差で勝っていたとしても、それだと勝てるかどうか微妙だったため、オフラインのリスクが高くなるのを承知で、それまでよりも速いモードで挑んだのだそうだ。しかし、直線速度は上がるものの、その分コーナリングで姿勢制御に時間がかかってしまうようで、トータルでは逆にタイムが悪くなってしまったというわけだ。
一方のKASSIN DCDの製作者のじぇーけーそふとさんは、やれることはやったが、1秒差をまさかひっくり返せるとは思っていなかったという。事実、準決勝での風兎2009LTは10秒32なので、このタイムを再度マークされていたらKASSIN DCDは勝てなかったことになる。しかし、1秒というタイム差しかなかったことが、山口さんに結果として安全策を選ばせなかったわけで、プレッシャーをかけ続けたのが勝因といえるのではないだろうか。非常に技術的にも見所があり、製作者のどのモードで走らせるかという駆け引きも熱い、いい勝負だった。
 |  |  |
| 決勝のスタート前の一瞬。お互いにどのモードで走るかの読み合いも感じられた | 【動画】グランプリファイナルの決勝戦にふさわしい、強豪同士の対決の様子 | 優勝者インタビューを受けるじぇーけーそふとさん。まさか勝てるとは思っていなかったという |
さらに今回は、大阪大会でも取り上げた女子中学生二足歩行ロボットビルダーのヴィーさんによる「海賊船ペコ号」が関東初見参。Beauto Chaserのボディの上にレゴブロックの海賊船が載っているという、Beauto Chaserベースとしては最重量級という1機だ。
もう1機は、日産R35型「GT-R」のラジコンカーを改造して東京大会に参戦したsotさんの新車・三菱「ランサー エボリューション IX」のD1グランプリ・チームオレンジ仕様(YUKE'Sクスコ チームオレンジ ランサー with ORC)。ラジコンカーのCPUをBeauto ChaserのVS-WRC003に、モータをマブチ FA-130に交換した1機である。大多数の機体がオリジナルボディであってもBeauto Chaser同様に2輪駆動(左右の旋回や方向転換は内輪と外輪に回転差をつけて行なう)だが、4輪操舵となっているのが非常に珍しい1機だ。東京大会の時、参加者らが「次はぜひドリフトする機体を!」と熱望していたのだが、なんとそれに備えて開発してきてくれたというのだ。今回は残念ながら、直角ターンの多い複雑なコースレイアウトのためにうまくいかなかったのだが、来年に期待したい。なお、海賊船ペコ号対ランエボIXのルール無用(コースレイアウト関係なし)のスペシャルマッチも行なわれ、非常に会場が沸く一番となった。
 |  |  |
| 海賊船ペコ号。大阪から来た製作者のヴィーさんは、ホワイトナイト-Kがカッコいいとの感想 | 【動画】ペコ号の走行の様子。いちいち止まってから大砲を撃つ仕様 | sotさんの新車・三菱「ランサー エボリューション IX」。 |
 |  |  |
| 【動画】ランエボIX。かなりの暴れん坊(?)っぷりで、コースレイアウトは関係なし | 急遽行なわれることになったスペシャルマッチでは、ランエボIXがペコ号に襲いかかる! | 【動画】海賊船ペコ号対ランエボIX。ランエボIXの暴れっぷりに会場も大興奮 |
なお、来年もエンカフェとヴイストンのコラボレーションにより、エンジニアアワードでのBeautoロボコングランプリは実施される予定。また、エンジニアアワードで部門が設けられるかどうかは現時点では未定だが、11月にヴイストンから発売された2輪型倒立振子ロボット「Beauto Balancer Duo」によるライントレース競技の開催を検討していることもヴイストン代表の大和信夫氏から発表された。Beauto Balancer Duoによるデモンストレーションも披露され、見事に今回のコースを1周。当たり前だが、Beauto Chaserのような安定感はないので、どのようにして倒れないようにしつつ速度を上げていくのか、いろいろと工夫が必要になるとは思われるが、これはこれでまた面白そうな競技となりそう。興味のある方は、ぜひ今から参戦に備えて研究とテストを行なってみてはいかがだろうか。
 |  |  |
| 2輪型倒立振子ロボット「Beauto Balancer Duo」 | 【動画】Beauto Balancer Duoがライントレースする様子 | Beautoロボコングランプリファイナルの最後は、表彰台3選手+特別賞(チームYODO)と大和代表で記念撮影 |
 |  |  |
| 優勝を獲得したKASSIN DCD。最後までわからなかった逆転優勝 | 準優勝の風兎2009LT。KASSIN DCDとはいいライバル関係を築けたのではないだろうか | 3位入賞のホワイトナイト-K。ノーマル機体にさらに重量的にも厳しい状態で3位は見事だった |
 | ||
| トーナメントの結果 |
●IDKさんのコイルガン搭載ラジコン戦車が電子工作部門の大賞を受賞
また、エンジニアアワードの電子工作部門の受賞作品の展示も実施。Beautoロボコングランプリファイナルの表彰式の後に懇親会が行なわれ、その中で受賞作品の製作者などのプレゼンタイムが設けられた。応募は150点近くあり、製作者が撮影した作品紹介の動画などを基に審査が行なわれ、大賞1作品と2賞1作品ずつが選ばれた。今回は受賞作品のほか、製作者が持ち込んだ作品も自由に展示され、ものづくりの楽しさを感じられるイベントとなっていた。ちなみに、受賞作品は以下の通り。カッコ内は製作者名(敬称略)。
大賞:No.99 コイルガン戦車-1/24 RC ストームタイガー(IDK)
メカロボショップ賞:No.104 e-cube:喋るサイコロ(山口辰久)
P板.com賞:No.68 LED Tile(あきた)
「コイルガン戦車」は、立場上、仕事で兵器を作るわけにはいかないというIDKさんが、「なので趣味で作りました」というラジコン戦車。パチンコ玉(BB弾ではない)を水平方向なら約100m、鉛直方向でも50mの高さまで撃ち出せるという、本気で破壊力を備えたコイルガン(電磁石の仕組みでパチンコ玉を加速させて撃ち出す)を搭載しているのが最大の特徴だ。もちろん暴発したら危険極まりないので、この日は発射機能を完全に封印した形で展示したが、照準用のレーザーポインターなどは作動するので、実際にラジコン戦車として操作し、その出来映えを披露していた。ちなみに、屋内じゃないとレーザーポインターがどこに当たっているかがわからないが危険なので発射できず、発射できる誰もいないような屋外ではレーザーポインターがどこに当たっているかがわからないのには困ったそうである。
 |  |
| 大賞を受賞したIDKさん製作の「コイルガン戦車-1/24 RC ストームタイガー」 | 電子工作とロボットの両部門の記念撮影。左がコイルガン戦車のIDKさん |
大賞以外に設けられた2つの賞の内、メカロボショップ賞を受賞したのが「e-cube:喋るサイコロ」だ。Beautoロボコングランプリファイナルで準優勝となった山口さんの作品である。放り投げて出た目を喋ってくれるというサイコロで、2つある内の高性能な方は、斜めになると「やり直し」ともいってくれるという内容だ。ヌイグルミなので幼児の知育玩具としてすぐにでも販売できそうな作品である。もうひとつ受賞作品、P板.com賞受賞の「LED Tile」は、この日製作者のあきたさん自身の来場は残念ながら叶わなかったのだが、これまた凝った作品。レーザーポインターで表面を照らすと、照射された位置のLEDが赤く光るのだが、面白いのはその装置を傾けると、LEDの赤い光が重力に引かれて落っこちていくところ。しかも装置はタイルのように複数を組み合わせられる仕組みで、組み合わせ方や数は自由にできるというもの。つなげたらつなげた分だけの面積でLEDの赤い光が落ちていくそうである。
 |  |
| メカロボショップ賞を受賞した山口さん製作の「e-cube:喋るサイコロ」 | 【動画】放り投げられたサイコロが出た目を告げる様子 |
 |  |
| P板.com賞を受賞したあきたさん製作の「LED Tile」 | 【動画】LED Tileの様子。ちょっとしたゲームになりそう |
そのほか、Beautoロボコングランプリファイナルで優勝したじぇーけーそふとさんも出展。垂直でも逆さまでも走れるBeauto Chaserを披露した。マグネットを利用しているので、鉄製の壁や天井じゃないと無理なのだが、会場のホワイトボード上に用意されたオーバルコースをライントレースする様子を見せ、ヴイストンの大和代表も「やろうと思っていたら先にやられちゃいましたねー。今度は壁や天井でBeautoロボコングランプリをやりますか(笑)」と感心していた。そのほか、paiさんの折りたたみ式キーボードを搭載した「自作PDA」(実際に仕事で使用中)、大阪のロボットビルダーであるsakiaさんのiPhoneで操作する小型ロボット「midget-ghost」も展示(そのiPhoneに電話すると、電話したiPhoneからも操作可能)。飛び入りで展示された作品のいくつかも本人によるプレゼンが行なわれ、創意工夫に感嘆の声が上がり、また一部のアブない発言には爆笑の声が上がっていた。
 |  |  |
| じぇーけーそふとさん製作の垂直も逆さまも走行可能なBeauto Chaser。残念ながら受賞には至らず | 【動画】実際に逆さま状態で走行する様子。天井Beautoロボコングランプリとか開催できそう | paiさんの折りたたみ式「自作PDA」。もちろんたたんだ状態 |
 |  | |
| 自作PDAのキーボードを展開した状態。ちゃんと動作してPDAとして使用可能だ | sakiaさん製作の小型ロボット「midget-ghost」 |
来年も引き続き電子工作部門も行なわれる予定で、今年と同様に来年12月にはBeautoロボコングランプリファイナルと合わせて一般への発表の場を設けるとしている。電子工作のアイディアがあるという人は、ぜひふるって参加してみてほしい。
2009/12/22 20:18