京都コンピュータ学院 ものづくり体験教室「電子サイコロをつくろう!」
~電子工作体験レポート
9月5日(土)、京都コンピュータ学院洛北校において、ものづくり体験教室「電子サイコロをつくろう」! 第19回ワークショップが開催された。
 |  |  |
| ものづくり体験教室「電子サイコロ」を作ろう!! | 教室風景 | 京都コンピュータ学院 洛北校 |
同校では、3年前から子どもから一般社会人までを対象としたワークショップを開催している。在職の先生方は、専門性のある趣味を持っている人が多い。授業のカリキュラムとは別に、もっと多くの人にものづくりの楽しさを知ってほしいと始めたそうだ。対象は、子どもからシニアまでと幅広い。ものづくり体験教室で電子工作を課題としたのは、今回が6回目となる。8月に開催したワークショップが募集人数を超える人気だったため、今回の追加開催となった。
教材の電子サイコロは、同校講師の久保田先生が設計したオリジナルキットだ。子ども達にも作りやすいようにパターンの間隔を広くとるなど工夫されている。教室はマイコンやLEDの基礎的な説明から始まり、ハンダ付けのコツも丁寧な説明があった。
 |  |  |
| 3軸加速度搭載「電子サイコロ」完成品 | マイコンってなに? | マイコンや電子部品についての座学からスタート |
 |  | |
| 講師の久保田英司氏(京都コンピュータ学院 総合情報システム部) | 吉岡聡氏(京都コンピュータ学院 広報部) |
●電子サイコロとは
久保田先生が設計した電子サイコロは、3軸加速度センサーが搭載されており、普通のサイコロのように振ると7つのLEDが光って、サイコロの目を表示する。本誌読者の多くは「乱数で1~6の数字を取得すればいいじゃん? なぜ、加速度センサーを使う?」と思うのではないだろうか。筆者は思った。
その点を率直に質問したところ、「マイコンは疑似乱数なので、長く使っているとどうしても偏りが発生します。インターフェイスに“人”を使うことで、問題点を解決しました」ということだった。
加速度センサーのX軸の値を、サイコロを振ったときの初期回転数とし、Y軸の値をサイコロが止まる直前のコロコロ……コロに対応させたという。当初、X軸の値だけでプログラムを作成してみたところ、練習すれば狙った目を出せるようになったそうだ。そこでY軸の値を追加した。完全に同じスピードと軌道で腕を振ることは不可能なので、乱数として採用できるレベルになったという。
「サイコロを振る時に垂直に振る人はいないだろうと考えた」ので、今回のシステムにZ軸は使用していない。ところが、試作品をモニターの子どもに使ってもらったところ、一番最初に「カ・メ・ハ・メ波~」とやられたそうだ。子どもの発想はいつでも大人の斜め上をいく。サイコロではカメハメ波は出ないと納得してもらい、ごく普通のサイコロとして振ってもらったそうだ。モニターの2人(久保田氏の息子さん)が、一覧表をつくり腕の振り幅やスピードを変え2日間検証した結果、「狙った数字はでない」と納得したという。
組立に入る前の座学では、LEDなど電子部品の説明に始まり、PCとマイコンの説明や、生活の身近なところで活用されている加速度センサーについて紹介もあった。歩数計も加速度センサーを搭載して、単に歩数をカウントするだけではなく、歩いている時と走っている時の波形の違いによりカロリー計算をできるようになっているなど、改めてテクノロジーが生活の中に浸透していることを知った。
 |  |  |
| 普通のサイコロのように振ると、LEDが光って出目が変わる | LEDの説明 | LEDと電球の違い |
 |  |  |
| サイコロの目をLEDでイメージ表示する | 電子サイコロの回路構成図 | 今回使用しているLED以外の電子部品 |
 |  |  |
| 加速度センサーで、振り方を検知して出目を算出している | 加速度センサーは、いろんな製品に使われている | 身近なコンピュータの代表格「パソコン」 |
 |  |  |
| コンピュータに必要な機能が詰まったのが、マイコン | マイコンはほとんどの家電製品に搭載されている | 電子サイコロの回路図 |
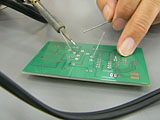
●ハンダ付けの注意点
久保田先生に教えていただいたハンダ付けのコツを伝授しよう。これから電子工作やロボットを初めて作る人には、参考にして欲しい。
ハンダごては20~30Wで、コテ先が細いものが電子工作には向いている。ハンダごては250度以上の高温になるので取り扱いには注意が必要だ。作業の途中でコテを置くときには、必ずコテ台に戻さなくてはならない。また作業が終わった時、作業中に離席する時には、必ずコンセントを抜く習慣をつけよう。コテ台にあるスポンジは軽く湿らせておき、コテ先が酸化膜などで汚れた時にクリーニングするのに使う。ハンダごてをコテ台に打ち付けたりすると、内部のセラミックが割れて故障の原因になるので、禁物だ。
基板は部品の絵が描いてある方に刺し、裏側の銀色ドーナッツ穴のパターンにハンダで固定していく。電子部品を指定の位置に取り付けたら、リード線(部品の足)を少し開き部品が落ちないようにする。ハンダごては予め電源をいれ、5分ほど熱しておく。パターンとリード線の両方にハンダごてを当てて熱を加えてから、糸ハンダを添えるようにすると、すっと溶ける。必要分が溶けたら糸ハンダを外し、半呼吸おいてからハンダごてを放す。光沢を帯びたハンダが、円錐状にリード線からパターンに盛られていれば、OKだ。
ハンダ付けは、高さが低い部品から行なうのが基本。リード線がたくさんある場合は、1カ所を仮止めして、基板と部品の間に隙間がないか、確認してから残りをハンダ付けする。
リード線が長い場合は、ニッパーで不要部分を切り取る。この時、リード線を指で押さえておかないと切った拍子に思わぬ方向に飛ぶので注意しよう。
 |  |  |
| ハンダごて、ヤニイリハンダ、ラジオペンチ、ニッパーを用意する | 正しい姿勢で作業しよう | 部品配置面。部品記号をよく見て、方向があるパーツは間違えないように注意が必要 |
 |  |  |
| ハンダ面 | 部品を差す | リード線を少し開いて部品が落ちないようにする |
 |  |  |
| 【動画】ハンダ付けをする | 【動画】リード線を切る時は、切れ端が飛ばないように指で押さえておく | ハンダが少なすぎたり、多すぎてはNG |
●電子サイコロの製作
電子部品の基礎知識を学び、ハンダ付けの注意点も覚え、早速、電子工作に取りかかった。
電子工作で最初にやるのは、パーツがすべてそろっていることの確認だ。抵抗のように同じ形で値が違うものは間違えやすいから、特に注意が必要だ。LEDやICは、+と-の方向を間違えると正しく動作しない。一つ一つ確認しながら作業を進めよう。
久保田先生が用意したマニュアルは、製作編だけで30頁以上に及ぶ。工作手順だけではなく、一つ一つの電子部品について、取り扱いの注意点など判りやすく表記されている。極性がある部品については、何を目印にして+-を判断するのか明記されているので、初心者でも安心だ。
筆者もマニュアルを見ながら、さくさくと作業を行なうことができた。
 |  |  |
| 3軸加速度センサー搭載「電子サイコロ」のパーツ | 抵抗の値の読み方。色で抵抗値を判読する | 抵抗。4種類6本。470Ωと4.7kΩは色が一カ所違うだけなので注意が必要 |
 |  |  |
| 赤色LEDと緑LED6本を使用。LEDはリード線の長短、発光部分の形状で+-の極性を判断する | 足が短い方は、LED本体の裾が平らになっている。リード線を切った後は、ココで見分ける | パーツをハンダづけする順番。背が低い順にするのが基本 |
 |  |  |
| 積層セラミックコンデンサは、リードをラジペンで伸ばして基板の穴間隔に合わせる | 抵抗の足は穴の幅に合わせて曲げる。抵抗は4種類あるので、取付位置に注意する | 1)積層セラミックコンデンサ、2)抵抗を取り付けた。ICソケットは切りかけの向きを合わせる |
 |  |  |
| 1)セラミック発信子、2)プッシュスイッチ、3)スピーカーをつけたところ。次はLEDをつける | LEDの向きが間違えてないことを確認したら、3軸加速度センサーをつける。向きに注意! | スライドスイッチ。基板の図とパーツの形状があうようにリード線を差す方向を考える |
 |  |  |
| 電池ケースの取り付け。予備ハンダをしてから、電線をハンダづけする | 全ての部品をハンダ付けした | キレイにハンダがのっているか、目視で確認 |
 |  |  |
| 最後にマイコンをICソケットに取り付け。切りかけの位置を合わせること | 電池ボックスは、両面テープで固定する | 産軸加速度センサー搭載「電子サイコロ」完成! |
 |  |  |
| 小学生~社会人が電子工作に挑戦した | 筆者も頑張った | 【動画】完成品の動作テスト |
小一時間の作業で電子サイコロが完成すると、教室に参加している子ども達はさっそく双六で遊び始めた。
教室の後方には、京都コンピュータ学院の生徒達が製作したロボットが展示されていた。座学でコンピュータやマイコンの話があったため、今日、自分たちが作った電子工作の延長線上にこうしたロボットがあるというのが理解しやすかったのか、中高生達が製作した生徒に熱心な質問をしていた。
 |  |  |
| 電子サイコロを使ってすごろくで遊ぶ | 【動画】電子サイコロの動作 | 【動画】京都コンピュータ学院生徒が製作した六足歩行ロボット |
 |  | |
| 四足歩行ロボット | 体験操縦をしたり、製作した生徒に話しを聞いたり興味深そうだった |
京都コンピュータ学院では、電子工作に限らず映像制作やゲームプログラム入門、車・バイクをテーマにした講演会など、幅広いジャンルに渡ってワークショップを開催している。10月4日(日)には、天文学とコンピュータについて学ぶワークショップが開催される。対象は、高校生、中学生、小学校高学年(保護者同伴)、一般。参加費無料。親子で参加してみてはいかがだろうか。
2009/9/14 00:00