Willow Garage、東大にてロボット研究用ソフトウェアセミナーを開催
 |
5月19日、東京大学工学部にて、Willow Garage(ウィローガレージ)社と東京大学工学部情報システム工学研究室(JSK)によるロボット研究用ソフトウェアのセミナーが行なわれた。
Willow Garage社は2006年に設立された、パーソナルロボット分野においてオープンソースのハードウェア・ソフトウェアを普及させ、研究開発を促進することをミッションとしている米国のロボットベンチャー。ロボット用OS「ROS」、コンピュータビジョン向けのオープンソース・ライブラリー「OpenCV」などのソフトウェアのほか、研究用ロボットとして実際に作業を行なえる双腕を持つ移動ロボットプラットフォーム「PR2」を開発している。同社では自社のことを「ロボット研究のシンクタンク兼インキュベーション・センター」と位置づけている。
今回のセミナーは5月12日~19日まで神戸国際会議場で行なわれた「ICRA2009」のゴールドスポンサーとして経営メンバーが来日した機会に、ロボット研究に関するディスカッションを深め、多くの研究者の方々に親交を深める場を提供する目的で実施された。「OpenCV」と「ROS」の情報ほか、Willow Garage社に一週間滞在したことのある東京大学 情報理工学系研究科 准教授の岡田慧氏によるヒューマノイドロボットプラットフォーム「HRP-2V」の認識行動プログラミング演習に関する講演が行なわれた。講演会が終了したあと、懇親会と東京大学工学部情報システム工学研究室によるロボットのデモが行なわれた。
 |  |  |
| 【動画】東大工学部JSKによる「HRP-2V」 | 【動画】Willow Garage社のROSと東大のソフトウェアを組み合わせて顔認識して挨拶するデモを行なったが、学会後のため人数が多すぎたかあまりうまく動かず | 【動画】東京大学IRT研究機構による思い出し支援ロボットのデモ。詳細は会見時の記事を参照 |
●オープンソースのパーソナルロボットは世界を変える
 |
| Willow Garage社代表取締役社長 スティーブ・カズンズ氏 |
まずはじめにWillow Garage社 代表取締役社長のスティーブ・カズンズ(Steve Cousins)氏が、同社のビジョンと開発しているロボットオペレーティングシステム「ROS」について紹介した。同社は他の多くの会社と違い、第一のゴールが「世界にインパクトを与えること」であり、カネを稼ぐことは二の次だという。社員数は38人あまり。会社はカリフォルニアにある。
カズンズ氏は「オープンソースのパーソナルロボットは世界を変える」と語った。パーソナルロボットとは、人間サイズで人間の仕事ができるロボットのことだ。人をケアし、料理や掃除、障害者を助けることなどを用途として想定しているという。
オープンソースのロボット・ハードウェア、ソフトウェアがあれば、必要に応じてそれぞれの部品を組み合わせることができる。また多くのプレイヤーが参加することで化学反応が起こる。それがイノベーションを加速するという。オープンソースを使うことで、ロボットの普及とイノベーションのカーブを上げるまでの時間を短縮でき、オープンソースコミュニティのバックアップを受けられることは大きなアドバンテージだと述べた。
同社のマイルストーンは4つ。1つ目は昨年12月に達成した安定した移動ロボット技術。2番目はドアを開けること、3番目は「PR2」と「ROS」について誰でも使えるようにドキュメント化すること。4番目は「PR2」を10の研究機関に提供することだ。
双腕の移動ロボットプラットフォーム「PR2」は安全でロバストであり、拡張可能なように作られているという。カズンズ氏はケーブルの耐久テストや45度程度の熱いコンテナ中での動作風景の他、テレオペレーティングでPR2がドアを開けたり冷蔵庫中のペットボトルを取り出したり、引き戸を開けたりする様子などを動画で示し、「PR2」に対する自信を示した。現在はもっと洗練された操作システムを開発中だという。
ロボットOSの「ROS」はロボットの研究を加速することを目的とし「ロボティクス界のLinux」を目指しているという。商業目的または非営利目的での利用や改変も自由に行なえるオープンソースなソフトウェアとして公開されており、汎用的に使える。カズンズ氏はLinuxは多くのプログラムを組み合わせて使うのに適したシンプルなデータ構造をしているが、ロボットにおいてもそれを手本にすべきだと述べた。
「ROS」はコアとパッケージからなる分散システムで、基本構造は「talker」と「listener」の2つからなる。特にロボット全身のキャリブレーションにフォーカスしているという。また、ロボットに取り付けられたセンサーは動くので座標変換が重要な問題になる。ROSは自動的に座標変換するシステムを持っている。カズンズ氏はレーザーレンジファインダを使った測距アルゴリズム等を使った例として、ロボットによるドアの自律開閉デモを見せ、オープンソースには大きな学術界にも産業界にも可能性があると述べた。
 |  |
| パーソナルロボットのポテンシャルについて語るカズンズ氏 | Willow Garage社のロボット「PR2」。4kgの物体を把持できるという |
 |  |
| 遠隔操作の研究も行なっている | ROSによるナビゲーションシステムの例 |
●OpenCV
 |
| Willow Garage社上級主任研究員 ゲァリー・ブラッドスキー氏 |
続けてWillow Garage社上級主任研究員のゲァリー・ブラッドスキー(Gary Bradski)氏が「OpenCV」について講演した。「OpenCV」は「Intel Open Source Computer Vision Library」の略。ブラッドスキー氏が1999年、Intel社に在籍していた時代から開発しているコンピューター・ビジョン分野向けのC/C++のオープンソース・ライブラリーだ。画像処理機能がパッケージされており専門知識があまりなくても手軽に利用できる。ロボットだけではなくコンピュータビジョン関連で幅広く使われている。累積ダウンロード数は200万を超えており、たとえばGoogle MapやStreet Viewなどにも使われているという。日本語の解説書籍も刊行されている。
ブラッドスキー氏はコンピュータビジョンの難しさや、錯覚や遮蔽物に隠れた部分を補完する人間の視覚の仕組みの話題から話をはじめ、OpenCVの機能や画像処理、機械学習など実装分野について概説。Willow Garageの「PR2」においては、たとえばドアを開けるときのレーザーレンジファインダーや取っ手を見つけるためのステレオカメラを使ったビジョンシステムに使われている。
ブラッドスキー氏はロボットが自分でコンセントを指す様子などを示し、OpenCVの持つエッジ検出、オプティカルフロー、ステレオキャリブレーション、3Dトラッキング、セグメンテーション、機械学習ライブラリ(MLL)、モーショントラック、ジェスチャー認識や顔認識といった多くの機能を、多数のスライドを使ってざっと紹介した。今年の夏には新しいバージョンをリリースする予定だという。
 |  |  |
| OpenCVの用途 | OpenCVの構造 | 【動画】講演後のデモで、東京大学IRT研究機構のパーソナルモビリティに乗って楽しむブラッドスキー氏 |
●ヒューマノイド「HRP-2」を使った学生演習
 |
| 東京大学 情報理工学系研究科 准教授 岡田慧氏 |
ヒューマノイドロボット「HRP-2」をベースに、ロボットの視覚に基づく日常生活支援行動生成の研究を行なっている東京大学 情報理工学系研究科准教授の岡田慧氏は、これまで自身が行なってきた移動ロボット技術、ステレオビジョン技術、ビジョン技術を搭載したヒューマノイドを使った全身運動生成の研究などを紹介し、そして現在東京大学工学部で行なわれているヒューマノイドを使った学生対象のプログラミング演習について講演した。
ロボットのボディとソフトウェアをいったん切り離し、ソフトウェアに汎用性を持たせることが東大JSKのロボットソフトウェア技術のポイントであり、岡田氏自身もこれまでにいろいろなロボットに視覚技術を載せて動かすことで見えて来た、技術の足りないところを補ってきたという。コア技術には現在産総研に在席する松井俊浩氏が開発した「EusLisp」が使われている。オブジェクト指向機能の上でリスト処理などを実現しているEusLispは行列や立体の計算が容易であるという特徴を持ち、ロボットの構造モデリングやシミュレーションに用いられている。これまで稲葉研究室で作られてきたソフトウェアにはEusLispが使われている。
岡田氏らのロボットは、シミュレーション上と実機上で同じソフトウェアが動いている。視覚に基づく行動生成とは、ロボットが動くとロボットのビューが変化する。それに対して画像認識処理を行ない、行動のプランを生成して実行するということだ。ロボットにタスクをさせるためにはソフトウェアの統合が重要になるため、これまで統合ソフトウェアの研究を行なってきたという。
 |  |  |
| 岡田氏の作って来たロボット | ソフトウェアとハードウェアを分離している点が東大JSKのソフトウェアの特徴 | |
いっぽう、1998年~2002年の経済産業省「ヒューマノイド・ロボティクス・プロジェクト(HRP)」で開発され、現在研究用プラットフォームとして使われているヒューマノイド「HRP-2」は、CORBAをベースにした「OpenHRP」で動いている。ロボットを動かす基本プログラムは既に入っている状態なので、研究したいことに集中できる状態に、すぐに入れるようになったことが大きかったという。
岡田氏はHRP-2を使って経路計画の研究を行なった様子を示しながら、「いきなりアプリケーションに近いところから始められる」とメリットを語った。もちろんこれには、東大がこれまでの過去の研究例をすぐに新しいロボットにアプライできるような仕方で研究を進めて来た点が大きい。岡田氏は続けて開発して来たソフトウェアを拡張して来た様子を示した。現在の「EusLisp」にはダイナミクスエンジンが入るようになりシミュレーションの中で物体の落下等の挙動を忠実に再現しながらプログラミングができるようになっている。
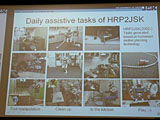
HRP-2は学生実習にも使われている。これは、やればやるほどさまざまな意見が出てきて研究者にとっても良い刺激となっているという。研究室に入って来て1カ月ばかりの4年生であっても一週間ほどで等身大ヒューマノイドにちょっとした日常動作を行なわせることができるそうだ。始めた当初は教育する側も手探りだったが、今ではだんだん教える方もうまくなり、3年生が10回程度の演習を経て、ヒューマノイドを使って釘を打ったり野菜を切ったりできるようになっているそうだ。また、この演習は大学院生にも展開されており、そこでもまた普段ロボットを使い慣れない人たちの反応を見ることができ、それを通して岡田氏らはシステムの改良を行なっていると述べた。
 |  |  |
| OpenHRPが使われているHRP-2 | 岡田氏がHRP-2を研究プラットフォームとして用いた最初の研究 | 【動画】ビジョンを使ったさまざまな行動生成研究に用いられている |
 | 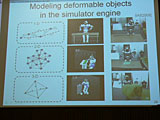 |  |
| 【動画】こちらは最近の研究トピックス | 【動画】ふとんのような変形する大型柔軟物体を扱う研究も実施している | 【動画】学生が一週間で作ったヒューマノイド動作 |
 | ||
| 【動画】別の学生たちによる動作例 |
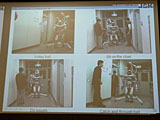
2009年3月15日~22日までの一週間、岡田氏らJSKの一部のメンバーは、Willow Garage社に滞在し、そのときにROS上のいろいろなプログラムを動かしてEusLispに繋いで遊んでみたという。そのときはほとんどWillow Garage社で寝泊まりするような状況だったと述べ、24時間開いている自由な会社だと感じたという。5月に行なわれたICRAでは、逆に東大JSKの「HRP-2V」にROSのソフトウェアを入れてデモを行なった。ある程度ナビゲーションして人間の顔を見つけたら寄ってくるというものだ。そのときは時間がなく、会場で直接プログラミングしていたそうだが、国際会議の会場にはROSのユーザーがあちこちにいて、教えてくれたという。
岡田氏は体験をふまえて、ROSとWillow Garage社のプロダクトについて「ハードウェアはすごく良い。見掛けを気にするのは日本人だけかもしれない。ソフトウェアもものすごく安定している。ただ、初心者には難しいかもしれないが、UNIXに馴れていれば簡単。コミュニティはGreat! 何か分からないことがあれば助けてくれることを肌で感じた」と述べた。なお岡田氏らが同社を訪問したときの様子はYoutubeにあるWillow Garage社公式チャンネルで見ることができる。
 |  |
| Willow Garage社のPR2に東大EusLispを組み合わせて使ってみた | 逆にEusLispにROSを組み合わせて使ってみた例。楕円の丸がROSの一部 |
なお稲葉雅幸教授は「EusLisp以外にも我々はさまざまなソフトウェアを使っている。ROSも含めてやはり実際に使ってみないと比較できない。特に学生はさまざまなソフトウェアを実際に自分で使ってみることが重要。それなりに時間はかかるけれども、他人に聞くだけでは駄目」とコメントをくれた。Willow Garage社で日本関連の業務に従事している大山彰久氏は「EusLispを使って来た東大とROSを使っているWillow Garage社、両者がそれぞれ互いのソフトウェアを乗り入れて使うことには大変大きな意義がある」と述べた。
 |  |
| 懇親会とデモには北陽電機のブースも。Willow Garage社と共同開発を進めるという | 今月発表されたばかりのUSBバスパワーの新型測域センサ「URG-04LX-UG01」 |
 |  |
| 【動画】東京大学IRT研究機構が開発したパーソナルモビリティのデモ | 昨年末の発表後の展開としては、180度の視野を持つステレオビジョンとレーザーレンジファインダをつけ、足下の障害物も探しながら動けるように研究中 |
2009/5/20 21:01