記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
福岡で「次世代ロボット安全評価・対策技術セミナー」開催 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1月14日(水)、福岡市天神のソラリア西鉄ホテルにおいて、ロボット産業振興会議主催によるロボットセミナーが開催された。セミナー全体のタイトルは「次世代ロボット安全評価・対策技術セミナー」で、そのタイトルの通り、ロボット(特にサービスロボット)の安全基準や対策技術の確立について考えようというものだ。 経済産業省の製造産業局産業機械課の是永基樹氏が、政府のロボット政策について述べた後、3人の講師によるロボットの安全対策についての講演が行なわれた。
● ロボットの安全確保の考え方とその方策
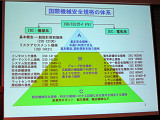
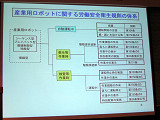
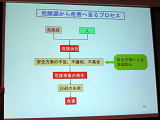
現在、産業用ロボットについては労働安全衛生規則(ISO12100など)が存在し、それは基本的に機械一般の安全規格に従っている。産業用ロボットではなくサービスロボットであっても、安全設計の基本的な考え方は同じとなっている。その考え方は、1つの方式でリスクを下げるのではなく、3つの段階でリスクをそれぞれ下げて行くというものだ。具体的には「危険源」→「安全方策」→「危険の回避」の3段階でのリスク低減となる。池田氏はこれらについて例を挙げて説明していたので紹介する。
「危険源」については「ロボットと人が遭遇することで危険が生じるのであれば、危険源であるロボットを取り除けば危険そのものが起こらない。またロボット自体が100%安全であれば危険は起こらない」としている。むろん、「ロボットを取り除くのであればそもそもロボットの必要がないし、また100%安全なロボットを製造することは難しい。その結果として次のステップでのリスク低減が必要となる。 「安全方策」については「ロボットと人が遭遇することで危険が生じるのであれば、人がロボットに近づいていかなければよい」ということで、具体的には人とロボットが接触しないためのガードやフェンスの設置などが挙げられる。ただし、産業用ロボットなら動作中に人間とロボットを完全に切り離してしまえばよいが、サービスロボットではそれは意味がない。 「危険の回避」については「ロボットと人が接触しても、低速で動いていれば人は怪我をしない」ということで、センサーの設置によるロボットの動作の減速・停止などが挙げられる。 その3つの段階でそれぞれにリスクを減らしていくことにより安全が図られるというもので、この基本的な考えは産業用ロボットだけではなく、サービスロボットも同様である。
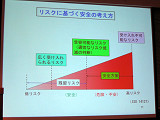
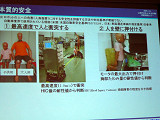
設計段階でのリスク低減、各種センサーを使用しての減速停止による安全確保など、多段階でのリスク低減がサービスロボットでも行なう必要がある。ただし、サービスロボットが人の間で使われる以上、隔離や停止による安全の確保が難しい時もある。その場合は「リスク受容」の考え方も考慮しなくてはならないという。 たとえばサービスロボットと人間が接触した場合、死亡や怪我といった高リスクは決して受容することはできない。しかし、サービスロボットと人間が接触しても、人が痛みを感じないレベルであれば、「人とロボットの接触」のリスクは受容できる。これが「リスク」受容の1つの例だ。 リスクを低減した上で、それでも残存したリスクがあることを使用者に告知し、わかった上で使用してもらう「リスク受容」の考え方が必要だという説明は興味深かった。
● 屋外警備案内ロボットの安全対策について
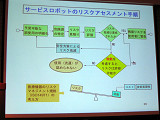
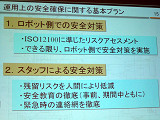
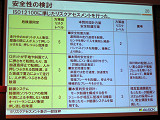
綜合警備保障は警備ロボットを使っていることでも知られているが、その警備ロボットに関しての安全性の考え方と、実際に行なわれている安全手法についての内容だった。 綜合警備保障でも安全性についての考え方はISO12100に基づくリスクアセスメントを実施。「危害の酷さ」「危険源へ人が暴露される頻度」「危険事象の回避可能性」の3要素に注目し、各リスクレベルを5段階で判断し、それぞれの対応を考えるというものだ。具体例として、愛知万博に参加したガードロボiについて、事例を挙げて説明があった。
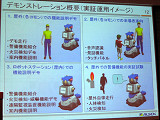
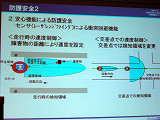
ガードロボの一番の危険はガードロボによる人間の押しつぶしであり、その押しつぶしも「走行中のロボットが人を壁の間で押しつぶす」危険と「ガードロボットが転倒することによる押しつぶし」の2つに分けられ、「走行中のロボットが人を壁の間で押しつぶす」危険が許容できないリスクのレベル5に分類された(転倒は1回きりだが、走行中の押しつぶしは絶えず力がかかるため)。 「走行中のロボットが人を壁の間で押しつぶす」危険のリスク低減に関しては、「移動速度を低くする」→「ロボットにセンサーを設置し、進行方向に人がいた場合に停止する」→「バンパスイッチを設置し、接触した時に停止する」という手法でリスクの低減を図った。 「ガードロボットが転倒することによる押しつぶし」に関しては、「転倒しにくい重心設計」でのリスク低減を行なった(実際に転倒試験なども行なったそうである)。 それでも残る危険に対しては、スタッフの対応によるリスク低減策を実施し(無線による非常停止スイッチをスタッフが携帯するなど)、愛知万博開催期間中における事故は「0」だったそうだ。
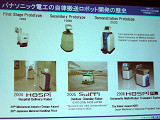
● 自律搬送ロボット「HOSPI」の安全対策について
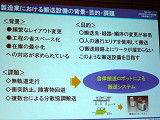
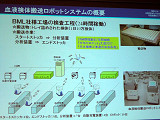
従来の血液検体検査は、検査装置に血液検体をベルトコンベアで運んでいた。これを搬送ロボットを使ったシステムで代用できないかと考えて、実際に血液検体搬送ロボットシステムを構築し実績を上げている。
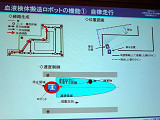
まずはロボットの自律移動についての説明があった。ロボットは基本的に地図を内部に持っており、車輪の回転数で現在自分がいる位置を把握して移動する。ただし、どうしても誤差が生じるので、レーザーレンジセンサーで壁の位置を検出して誤差の修正を行なっている。現場では多数のロボットが同時に動いているため、ぶつからないように自律制御だけでなく、同じエリア内に存在できるロボットの台数制限などの群制御も行なっている。自律制御と群制御によりロボットたちは現場でスムーズに動くことが出来る。 そのHOSPIの安全対策に関しては、前の講演者と同じように多段階のリスクアセスメントによるリスク低減を行なっていることが述べられた。HOSPI独自の安全対策としては、前方の障害物に対しては楕円状のセンサー感知範囲を設け、障害物がどの位置にあるかで移動速度の変化を決定するシステムが紹介された。具体的には、進行方向の真正面に障害物があれば停止し、横に存在して衝突する危険がなければ移動速度を落とさず、その中間では存在位置に応じて速度を落とすというものだ。
今回の講演では、各講師から「多段階でのリスク低減を図る」と同じような方針が示された。これは偶然ではなく、いずれの企業も愛知万博に参加し、経済産業省の主導でロボットの安全についてコンセンサスを得られたことが大きいそうだ。 産業用ロボットと違ってサービスロボットは人の間で使われることを目的としているため、高い安全性が求められる。サービスロボットの開発・運用を考えている企業にとって、サービスロボットの安全性の確保は避けて通れないことだ。その意味でもこのような講演が九州だけでなく各地で行なわれることを望みたい。 ■URL ロボット産業振興会議 http://www.f-robot.com/
( 大林憲司 )
- ページの先頭へ-
|