記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
「川越さんぱくロボット競技会2008」が初開催! |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
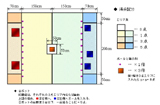
地域の活力を維持するためには、産業の振興は欠かせない。中小企業の技術力の強化や、地場産業の育成はもちろん、ものづくり産業を支える人材育成にも注力する必要がある。そこで本競技会では、参加団体の技術力をピーアールし、参加団体が相互に連携できる場を提供する目的があるという。 ● シンプルなルール、限られたスペックの中で創意工夫を凝らして試合に臨む 川越さんぱくロボット競技会2008のルールはいたってシンプルだ。【写真2】のようなフィールドにおいて、自作した自律型ロボットを利用し、相手の陣地にボールを多く送り込んだほうが勝ちとなる競技だ【写真3】。制限時間は前・後半戦各2分間、ハーフタイム7分間が与えられる。敵陣には3つに区切られたエリアがあり、その難易度によって得点が割り振られている。両端隅の小さなエリアにボールを入れると5点、中央奥のエリアに入れると3点、前方の広いエリアに入れると1点だ【写真4】。ボールは全部で10個ずつセットされ、相手の陣地に運ぶことになるが、自分のエリアにボールを誤って入れると自爆点となり、減点されてしまうので注意が必要だ。
また中央の50×50cmエリアには重量1kgの箱が置かれており、それを敵陣に運ぶとエリア得点の3倍にあたるボーナス点が得られる【写真5】。基本的にロボットは3台まで同時にエントリーできるが、台数によってハンディキャップが与えられる【写真6】。1台の場合は獲得した得点の2倍、2台の場合は1.4倍の倍率になる。そのため一概にロボットの台数が多ければ多いほど有利になるとはいえないようだ。
RoboDesignerの特徴の1つにプログラムを開発するGUI環境「TiColla」がある。「タイル」と呼ばれる機能ブロック(オブジェクト)をGUI上で組み合わせることで、入門者でも簡単にプログラミングが行なえる工夫がなされている【写真7】。さらに中上級者向けにはC言語も利用できるキットもある。このキットによって基本動作なら大抵のことはできる。しかし、競技ではタッチセンサーのみを使用し、プログラムのメモリ容量や、モータの数、パワーにも制限がある。いかに創意工夫してロボットを製作し、試合に臨むかということが腕の見せ所となったようだ。 ● キットを活かしたロボットからバリバリ改造ロボットまで さて今回初めてとなる競技会だが、合計7台のチームがエントリーし、和やかなムードの中で試合が進められた。試合では参加チームが2リーグに分けられ、予選リーグ(総当り)を行なう。このうち各リーグの上位2チーム、合計4チームが決勝トーナメントに進み、準決勝2試合、3位決定戦、決勝戦を行なった。ここからは予選リーグを勝ち進んだ4チームを中心にレポートしよう。
また、それぞれのロボットに役割り分担をさせていた。1つは箱を運ぶためのロボットで、大容量モータを搭載している。このロボットは、予選ではクローラー型で馬力を出す構造【写真10】だったが、準決勝からはクローラーを車輪のみに変更し、スピード重視の戦略にしていた。フロントの板金部には「JOYO」という文字が打ち抜かれており、勝利に対する意気込みは並々ならぬものがあった。もう1台のロボットは、ボールをできるだけ取り込めるように開口部の角度を改良し、タッチセンサーの感度を調整したという【写真11】。またロボットに取り込んだボールが詰まったり、ボールによって本体が乗り上げたりしないように工夫を凝らしたそうだ。
さらにTeam JOYOには第3の秘密兵器も用意。これは逆V字型の伸張ロボットで、2台の駆動部が左右に動くことで本体が伸びる機構を持っている【写真12】。フィールドいっぱいに広がると、もう相手側のロボットは陣地に入れなくなるという具合だ【写真13】。最初に2台のロボットで先制攻撃を仕掛け、3台目のマシンでディフェンスを固めるという作戦だ。
Toyo Aegisチームのロボットは、出走時にお手製のガレージからロボットが出るギミックになっていた【写真18】。どのようなロボットが出てくるのか、試合前に対戦相手に見せないという発想だったようだ。しかし、予選リーグの試合では逆にそれが裏目に出てしまい、入口部分でロボットが引っ掛かって、うまく出走できないハプニングもあった。準決勝1試合目の内容は、前後半戦ともにTeam JOYOが箱を陣地まで運ぶことに成功。前半は秘密兵器のデイフェンスロボットを伸張させて攻守ともにうまくいったが、後半戦はToyo Aegisが盛り返し、デイフェンスをかいくぐって得点を決めた【動画1】。準決勝1試合目の戦いを制したのはTeam JOYOであった。
準決勝2試合目の戦いは「Oh! Rollers」(株式会社岡本ローラ製作所)と「ATK」(株式会社エムエフケイ)だ。Oh! Rollersは単体のロボットで勝負していた【写真19】。単体で試合に望んだ理由は、ハンディがつき得点が2倍になるため、試合を有利に運べるものと考えたからだという。Oh! Rollersは社名からネーミングしたようだが、ロボットに乗っているRollersのロゴが格好よかった。基本的にボール狙いのマシンで、ボールをできるだけ多く取り込めるように、規定サイズいっぱいに開口部を広げており、何となく甲殻虫のようなイメージを彷彿させるロボットだ。 対するATKチームは3台のマシンで参戦した【写真20】。名前の由来はチームを構成する3人の頭文字をとったもので、各自で1台ずつロボットを製作していた。ボール狙いのロボットのほか、中央の箱狙い専用のロボットもあったが、こちらは改造を加えておらず、残念ながらモータパワー不足で箱をなかなか動かせなかったようだ。この試合に勝ったのはOh! Rollersだった【動画2】。
第3位決定戦は、準決勝で敗れたToyo AegisとATKの戦いとなった。Toyo Aegisは試合を重ねるうちに調子がよくなってきたようだった。実際この試合でToyo Aegisは箱の移動を2回とも決め、合計で86ポイントという高得点をはじき出した。一方のATKも2台のロボットがボールを相手陣地に運んで善戦したが【動画3】、Toyo Aegisが勝利した。 決勝戦は、Team JOYOとOh! Rollersというものづくりのスペシャリスト同士の一騎打ちとなった。Team JOYOは、決勝でも秘密兵器の逆V字型伸張ロボットを出走させ、駄目押しで勝ちを狙いにきた。自爆点はあったものの、前後半戦ともに優勢だった【動画4】。最終的に第一回川越さんぱくロボット競技会で初優勝をかざったチームはTeam JOYOであった。試合の最終的な結果は以下のとおりだ。入賞者には賞状、小江戸川越小判と姉妹友好都市の物産品が副賞として贈呈された【写真21】。 ■1位「Team JOYO」(常陽機械株式会社) ■2位「Oh! Rollers」(株式会社岡本ローラ製作所) ■3位「Toyo Aegis」(東洋大学Bチーム)
また今回の産業博覧会のテーマである「底力」を見せた2チームには特別賞が贈られた。 ■川越産業博覧会実行委員会顧問賞「ATK」(株式会社エムエフケイ)【写真22】 ■川越産業博覧会実行委員会会長賞「タカサゴ」(株式会社高砂精密)【写真23】【動画5】
以下、惜しくも入賞を逃したチームについても紹介しよう。「チーム Naka Naka」(株式会社中道工業)【写真24】は、2台のロボットを製作して参加していた。1台目のロボットは箱専用、2台目はボール専用にしていたが、やはり箱専用ロボットはパワーが足りなかったとのこと。ボール専用ロボットは、本体がボールに乗り上げることがあったので、移動の速さを変えたり、ロボットの高さを変えたりして工夫を凝らしたという。「Toyo Ajax」(東洋大学Aチーム)【写真25】は、ロボットはAegisと共通のロボットだったが、ミニ4駆ロボットなども用意していた。
全体的にみると、本競技はいかに先手必勝で得点を取れるかということがポイントになったようだ。またモータも大容量化するほうが有利だろう。そもそもデフォルトのモータだと箱を運ぶパワーがないため、勝利をつかむにはどうしても相応の改造が必要になる。またガチンコ勝負でも大容量モータのほうが有利だ。試合では何度かロボット同士が正面でぶつかり合うシーンもあったが、パワーの強いロボットが相手側のロボットを敵陣へ押し切っていた。 競技で特に面白かった点は、ロボット自身にはタッチセンサーしか付いていないにもかかわらず、時として高度な知能や感情でも持っているような予想外の動きを見せるシーンがあったことだ。たとえば1対1でガチンコ勝負になって膠着状態になっているところに、なぜかもう1台のロボットが助け舟のようにやってきて戦うシーンなどは、カメラが付いてセンシングしているのではないかと錯覚してしまった【動画6】【写真26】。 この競技会は初開催のため、競技者も運営側も試行錯誤で進めることが多かったようだ。とはいえ競技はシンプルで分かりやすく、ロボットが予想外の動きをみせてくれるなど、観戦側も十分に楽しめた。勝敗だけでなく、ロボットに縁のないハイテク企業が交流する機会にもなったようだ【写真27】。来年の競技会のさらなる盛り上りに期待したい。
● セグウェイ試乗会やサッカーロボットのデモなど楽しい催しも なお今回開催された川越産業博覧会2008では、ロボット競技会のほかにも面白いイベントや展示が行なわれていた。競技会が開かれた総合体育館内ではセグウェイの試乗会コーナーもあり、人気を博していた【写真28】。また東洋大学の松元研究室では、ロボカップ中型リーグで入賞したサッカーロボットのデモを実施【写真29】【写真30】。ロボカップのメンバーは、2050年までにワールドカップ優勝チームと勝負し、試合に勝つという目標を掲げている。ループシュートなどを放つロボカップ中型リーグは最も人に勝てそうな可能性がある部門だ。実際にデモでも人とロボットが対決していたが、ほぼ互角に戦えていた【動画7】【動画8】【動画9】【動画10】。来場者は御年寄りや子供が多く、初めて見るサッカーロボットに驚き、感心の声を上げていた。
■URL 川越さんぱくロボット競技会2008 http://robot.eng.toyo.ac.jp/robolab/kawagoecity/sanpaku2008/
( 井上猛雄 )
- ページの先頭へ-
|