記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
「第21回先端技術見本市 テクノトランスファー in かわさき2008」講演レポート |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
また、産学連携部門コーナーには黒田氏の明治大学理工学部機械工学科ロボット工学研究室も出展。講演で紹介されたロボットも展示された。講演内容と、展示されたロボットを紹介する。 ● ロボットが本当に動いてほしい場所ではロボット自身のセンサーが頼り 人はたやすく周囲の環境を認識して空間的な自分の位置を把握できることから、一見すると簡単なことに見えてしまうが、ロボットに位置を確認させることは非常に難しいと黒田氏はいう。現在は、カーナビでお馴染みのGPSがあり、その情報を使えば簡単に済むように思うかもしれないが、GPSは実はかなり大雑把なのはご存知の通り。確かに精度を上げることも可能だが、非常に広いエリアでの活用に向いているものであり、実際に精度が必要な人と共存するような場所では十分な精度を出せないという欠点を持つ。となると、ロボット自身が搭載する何らかのセンサー技術で位置情報を取得する必要がある。周囲にある人や建物などとの相対的な距離を正確に計測し、それらに対する位置を把握するというわけだ。しかしそのセンサーが、現状ではまだまだ不確実。例えば、方位角を調べるための方位計(磁気コンパス)の場合、ケーブルを1つまたいだだけで、そこから漏れる電磁波の影響を受け、角度が何十度もずれてしまったりする。つまり現在のセンサーの技術では、「すべての計測値に何らかの誤差(ノイズ)がある」という前提に立つ必要がある。そうした不正確さがつきまとう条件のもとでも、「いかに正確な位置を安定して得るか」が、ポイントなのである。 黒田氏は、センサーの信頼性を向上させるため、GPSとオドメトリ(車輪の回転数の計測計)、方位計、レートジャイロ(角速度センサー)を使用した実験を明治大学のキャンパス内で行なった。実際のところ、キャンパスでは感度のいいGPSを使用しても、正確に働く場所と建物や樹木の陰に入ってしまって不正確になってしまう場所がある。カーナビの画面も自車の位置がずれることがままあり、海や川の上を走った経験があると思うが、プレゼン画面「EKFによるセンサー信頼性の向上実地実験結果」の右側の実験結果は、まさにそれを示している。青色が実験の移動経路で、緑色がGPSの情報なのだが、後半に大きくずれてしまっているのがわかる。 このような、GPSからの情報が不正確であるように、各種センサーが得る情報もノイズが多い。そんな情報の正確さを向上させるのが、数学的な統計処理手法の1つであるカルマン・フィルタの拡張型であるEKF(Extended Kalman Filter)である。EKFで処理して各データを合成すると、正確さが向上し、実際の移動経路にほぼ等しい(多少のブレは存在するが)赤線が出力されたという次第だ。なお、この方法は、センサーの信頼性を向上させるための手法としては、初歩ということである。 黒田氏自身は環境によりGPSを使うが、基本的には使わない方向で現在は研究を進めているという。使うとしても、GPSが非常に高い精度の出る場所でほかのセンサーと一緒に使用するというもので、あとは使わないという方向だそうだ。あくまでもGPSは補助であり、基本はロボット自身が搭載するセンサーを使って周囲のものとの相対的な距離を測って、それで位置を導き出していくというわけである。
● 移動しながら地図を作製していく相対位置計測技術SLAM 続いて話題になったのが、相対位置計測技術のSLAM(Simultaneous Localization and Mapping)。位置を知ることと地図を作ることを同時に行なう、といった意味の略称である。この技術の特徴は、事前に地図や環境情報を持つ必要がないこと、環境に手を加える必要がないという2点。そこにあるものをカメラなどのセンサーを用いて計測=自然環境からランドマーク(特徴点)を見つけ出し、それらとの相対的な位置や距離の計測によって自分の位置を推定するという技術だ。ランドマークを自動的に次々と見つけ出していくことで、結果的に地図が作られていくことから、位置を知ることと同時に地図も作る、というわけである。ランドマークはあらかじめ人がマークしておくのではなく、あくまでも自分で見つけ出す形だ。また、ランドマークとは土地ごとにある目印になるような巨大建築物などを指すわけではなく、ロボットから見て周囲の環境の特徴となるポイントのことである。人の感覚に例えれば、机の角やカーペットのシミ、地面の穴といったもので、ロボットから見て周囲と区別しやすい部分を指す。 自分の現在地を見出しつつ、地図も作成してしまうあたりはまるで人のようで、ロボットもここまで来たか、と思った方もいるかも知れない。しかし、SLAMにも問題点はある。あくまでもロボットの位置が不確かな状態でランドマークまでの相対距離を測るため、ランドマークの位置も不確かなものになる。不確かな情報ばかりだったら、当然、情報は不正確になるわけだが、それを徐々に移動することで新たな情報を得て修整を行ない、正確さを上げていく。ランドマークとの相対距離を次々に計測し直していくことで、推定誤差(地図の歪み)が低減していくのである。もし、そうした計測途中で例えばGPSからの正確な情報を得ることができたとしたら、それによって一気に正確さは上がるし、グルっと回ってスタート地点に戻って来てそこがスタート地点だと認識できれば、同じようにより正確さが増すというわけだ。 ちなみにSLAMには多数のバリエーションがあり、黒田氏の研究室の学生が行なったシミュレーションでは、FastSLAM 2.0が利用された。FastSLAM 2.0は、統計処理手法としてEKFではなく、パーティクルフィルタ(particle filter)を用いたものである。EKFは実績のある統計処理手法で、現在も航空機やロケットなどの運航で実際に利用されているのだが、更なる精度の向上のためパーティクルフィルタを採用したというわけだ。 シミュレーションの内容は、擬似的に設定されたランドマーク(プレゼン画面「FastSLAM 2.0 シミュレーション結果」中の緑の点)と、ロボットがそこにあるだろうと推定しているランドマーク(ピンクの点)が散りばめられた平面を、FastSLAM 2.0の技術力で移動してスタート地点に戻ってくるというもの。このシミュレーションでは、実際のコース(青い線)に対し、推定したランドマークから自分の位置をFastSLAM 2.0で算出しつつ、移動したルート(赤い線)がどんどんズレてしまうように特別大きなノイズを混入している。このようなノイズの大きい情報でも、スタート地点に戻ってくると(すなわち過去に計測して場所がわかっているランドマークを見つけられると)、非常にいい精度に回復できることをデータが示している。
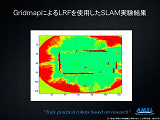
さらに次のシミュレーションは、ランドマークにノイズを入れた上に、処理の過程でも膨大なノイズを入れたという状況で2つの統計処理手法を比較した内容。比較を行なったのは、EKFと非線形のUKF(Unscented Kalman filter)で、実際のルート(青線)がきれいな円を描いているのに対し、EKFでは非常に乱れた軌跡になってしまう(黒線)。それに対し、UKFを用いた結果は、多少は実際のルートより離れてしまう部分もあるが、きれいな円を描いている(赤線)。こうしたことから、ノイズが多い計測値をもとにして精密に位置を把握するには、統計処理手法が非常に重要なファクターであることがわかる。なお、このシミュレーションでは、現実にはあり得ないほど大きなノイズを入れているそうで、UKFの有効性が確かめられたというわけだ。なお、これらのシミュレーションは、近いうちに実際にロボットを使用した実験に移るということである。 そして、実際にデスクトップサイズの小型ロボットを用いて行なった実験結果「GridmapによるLRFを使用したSLAM実験結果」も紹介された。部屋の中を移動し、レーザセンサーから取得したデータをSLAMで処理し、その部屋の形状を求めたというもので、部屋が長方形をしていることがわかる(移動ルートは描かれていない)。ほかの処理方法で走らせながら形状をセンシングした場合、まずこれほどきれいに長方形にはならないそうで、もっとぐにゃっと曲がった変な形になるそうだ。SLAMは、実際に走りながら計測して地形図を描くのに適した手法であることがわかる結果である。
● 統計処理をするためのデータを取得する手段にはステレオカメラを使用 統計処理をして位置を導き出す方法がここまで紹介されてきたわけだが、統計処理を行なうためには、もちろんデータが必要である。データがなければ処理のしようがないわけで、続いては「どのようにデータを取得するか」という話になった。黒田氏らは、最も使えるセンサーはビジョン(カメラ)であり、それもステレオカメラを考えているという。画像処理はとても難しい分野かと思っていたが、必ずしもそうではないらしい。しかも高級カメラを利用しているわけではなく、実際に黒田氏らが開発したロボットに搭載されているステレオカメラは、秋葉原などで簡単に手に入るごくごく普通の5,000円程度の製品を使っているそうだ。
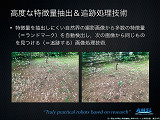
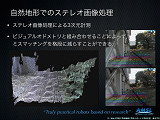
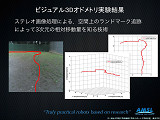
続いて紹介されたのが、「高度な特徴量抽出&追跡処理技術」と題されたプレゼン画面。公園かどこかの野原のような場所を撮影した画像が2点写っている。特徴的なのは、その風景上に無数の小さな点が尾を引いて移動しているのが被さって描かれていること。この小さな点の1つ1つが、風景の中から自動抽出したランドマーク(特徴点)だ。人の目で見た場合はわかりにくいのだが、ロボットからすると、識別可能なポイントというわけである。特徴点が尾を引いているのは、ロボットが移動しているため。移動すれば、当然視野が変化するため、検出したポイントが画像内を移動していくことになる。よって、その無数の尾の流れ方を見れば、どういう移動をしているかがわかるというわけだ。プレゼン画面の左の画像では、左に旋回しながら前進していて、右の画像は右に大きく旋回しながら前進しているというわけだ。特徴量の検出は数百点ほどだそうで、それに対して常に計算を行なっているという。ちなみに、数百点のランドマークの処理に必要な時間は、一般的なノートPCのスペックで1秒ほどだという。 次は、「自然地形でのステレオ画像処理」ということで、前述のステレオカメラで撮影した風景画像の処理について。ステレオカメラで撮影された2枚のほぼ同じ風景画像を比較し、マッチング作業を行なうことで、3次元の地形図を作成できる。ビジュアルオドメトリと組み合わせることで、つまり移動して計測することでより精度が上がるため、ミスマッチングを格段に減らすことが可能という仕組みだ。 さらに、ステレオカメラを用いた「ビジュアル3Dオドメトリ実験」も実施された。ステレオ画像処理による空間上のランドマークを追跡し、フル3次元で計算を行なうことで、ロボットの相対移動量が3次元的にわかるというもの。つまり、登り降りなどのアップダウンも含めて移動ルートがグラフ化されるというわけだ。プレゼン画面で紹介された実験が行なわれた場所は平らだったため、上下に関しては数10センチの範囲内でしか動かないのだが、それでもちゃんと上下が確認できたし、その場所がしっかり平らであることがわかるという結果だった。フル3次元で計測・計算ができることの重要性は、今後、ロボットが災害活動などに導入される場合により明確になる。アップダウンが激しい場所を移動するし、ロボット自身も傾斜したりするため、高低差などを確認できることがとても有意義なのだ。
● 画像のマッチング技術の応用から自ら地図を作成して移動する技術 また、画像のマッチング技術の応用することで、「特徴量地図データベース作成技術」に結びつけることができる。画像マッチング技術は、ステレオ画像にしか用いれない技術ではない。同じ対象物が写っている画像であれば、接写と望遠など、別々に撮った写真でも照合することで、同一の対象物が写っている画像だと判断が可能だ。そこで、あらかじめ特定の建物やオブジェなどの画像データとそれらがある場所の座標を持たせておけば、そのマッチング技術を使うことで、ロボットが自分の位置を確認するのに利用できる。ロボットが移動しながらあらかじめ画像や座標のデータを持つ建物やオブジェを見つけ、照合して間違いないことがわかれば、自動的に自分の現在位置がわかる。この技術を応用することで、ロボットに画像を伴った地図データベースを作成させることが可能になる。また、複数のロボットで地図データベースを作らせ、なおかつお互いがそれを参照できるようにすれば、複数台のロボットが効率よく動ける。将来的に、災害現場にロボットが導入されるようになると、何十台というロボットが連携して活動をするようなケースも考えられるわけだが、この技術を使えば、効率よく活動できるようになるだろうと黒田氏は語る。そしてロボットが動いて、環境を調べながら自ら地図を作成できるということが可能になってくると、もちろんその地図データベースを人も見たくなる(使いたくなる)はずだ。黒田氏は、この段階に至って初めて、ロボットが人のための道具に進化するといえるのではないかと述べた。 続いて紹介された実験も、明治大学のキャンパス内で行なわれた。建物のすぐ脇を、ロボットに通らせるというもので、ロボットに移動可能かどうか自分で判断させるというもの。建物の脇は、人なら簡単に通っていけるが、壁や路面の凹凸があり、いろいろなものが置いてあったりするため、車輪で移動するタイプのロボットが通るとなると、決して通りやすいとはいえない場所である。そこで、ロボットにそうした環境情報をセンサーで取得させ、3次元情報として再構築(周辺環境の認識)。その情報に基づいてロボット自身が通過可能かどうかを検出し、行動計画を決定し、先へ進んでいくというわけである。ロボットはリモートで移動して情報収集し、ネットワークでつながった別のコンピュータにも情報は転送されてくるので、使用者は部屋にいながらにしてロボットの現在の環境がわかる。 この実験で3次元情報の再構築同様にポイントとなっているのが、移動計画をロボット自身が立てる部分。一見すると移動ルートを見つけ出すのは大変そうな気もするが、黒田氏によると、しっかりとした地図さえ作ることができれば、ルートの算出は簡単なのだそうである。自分がどこにいるかがわからないことが問題になるのであって、地図を作ることができて、その地図の中で自分がどこにいるのかがわかりさえすれば、障害物を避けて移動していくのは難しくないのである。
● 黒田研究室で開発中の車輪型ロボットたち 最後に、黒田氏の研究室で開発している、これまでに紹介した各種技術を搭載した車輪型のロボットたちが紹介された。単純に車輪型というわけではなく、岩石や砂などに覆われた劣悪な環境での走破能力を高めるための工夫を凝らしたメカニズムが搭載されているのが特徴だ。10年ほど前から研究開発されてきたロボットが、5輪車の「PEGASUS」。メカニズムに対する名称にもなっており、同ロボットが搭載している走行システムのことを「PEGASUS機構」と呼ぶ。ボディが左右に分割されているため、段差を乗り越える能力が高く、車輪直径の1.5倍でも問題ない。そのPEGASUS(機構)を改良発展させた、最新型が「HEXUS」(機構)だ。産学連携で開発しており、協力関係企業との兼ね合いもあるため、まだ全体像を見せられないが、この秋に公開の方向で調整しているそうである。こちらは車輪が1つ増え、6輪車。PEGASUS以上に険しい環境も走行可能な特殊なシステムになっているという。このほか黒田氏の研究室では、地震や大雨・洪水などによる土砂災害が発生したような場所、また砂丘のような砂地の深い場所、泥濘地などでも効率よく移動できるような、車輪や足回りの研究・開発を行なっており、いいパフォーマンスを発揮するシステムもできてきているそうである。
また、今回ブースに展示されたロボットも紹介された。正確には、移動ロボットの研究開発用プラットフォームで、「infant」という。そして、その卓上サイズの小型版が「infant-mini」。今回紹介した実験結果は、すべてinfantかinfant-miniによって得られたものだ。単純にロボットという位置づけだけではなく、移動ロボットの研究開発用プラットフォームとされているのは、ロボットのソフトウェアの開発を主な目的としているからだ。infantシリーズ最大の特徴は、システムとソフトウェアの互換性が持たされている点。infantで大がかりな実験を行なう前に、まずinfant-miniで事前の準備的な実験を行ない、問題点などを洗い出した後にinfantにソフトを移して本格的に実施するという使い方ができるのである。実際、研究室では現在、この2種類が複数台ある体制で研究・開発が行なわれている。同研究室の学生がinfant-miniを使って室内を走らせつつプログラムを作成したら、1時間後にはinfantに移して屋外で実験というように効率が上がっているそうだ。何か問題がある度に、屋外の実験場と研究室を往来するという手間がだいぶ減らせるわけで、それだけでも手間や時間を節約できるというものである。この体制になって、ソフトウェアの開発速度は格段に上がったそうだ。 なお、infantの移動機構はアメリカ製の電動車イスを改良したもの。よって将来的には、infantはロボット(インテリジェント)型の車イスへの応用も考えているという。現在、車イスの利用者が事故に遭うケースが増えており、黒田氏は非常にその点を懸念している。本来身体に障害があるために車イスを使っているのだから、誤った操作や意図しない動作を車イスにさせてしまうことは起こりえるもの。そうした事故を防ぐためにセーフティ機能を備える必要があると考えており、それをロボット技術で実現しようというわけだ。黒田氏によれば、技術的にはすぐにでも可能ということである。
また、infantシリーズをベースにした製品が、オカテックから発売中だ。1つはインテリジェントモータコントローラ「OKA-D-102型」で、2008年8月末に発売開始。今後、infant台車とinfant-mini台車が発売される予定だ。 ● ロボットを真に「使える」ものにするために まとめとして、黒田氏は、ロボットを真に使えるものにするためには何が必要かということを語った。それには、数学理論に基づいた研究をしっかりと行ない、高度な自律移動技術を構築すること(を目指すこと)が必要という。自律移動するためには、周辺環境の把握も必要だし、自分の現在位置の確認も必要なわけだが、それらは今回紹介した画像処理を含む多数のセンサー処理技術により、3次元の高精度計測が可能になってきている。また、確実な移動手段も当然ながら必要。こちらも、メカニズム(モビリティ)研究により、人工地形を含めたさまざまな地形を自在に走行できるロボットシステムも製造可能になってきている。黒田氏によれば、年内ぐらいにはそうしたシステムを一般に公開できるようにしたいとのことであった。ロボットが自身に搭載したセンサーからの情報のみで精密に移動するためには、数学的な処理が非常に重要であることがわかるセミナーであった。自分で現在位置を把握しながら周辺環境をスキャンし、3次元地図を自分で描きながら移動できるロボットというと、まさに人がロボットに求めていることの1つではないだろうか。「あれをもらってきて」「これをどこどこまで持っていって」といったことがそう遠くない未来にできそうだし、災害現場で多数のロボットが連携しながら要救助者の捜索を行なうといったイメージが目に浮かんでくるような、素晴らしいセミナーであった。 ■URL 第21回先端技術見本市 テクノトランスファー in かわさき2008 http://www.tech-kawasaki.jp/ 明治大学理工学部機械工学科ロボット工学研究室 http://www.isc.meiji.ac.jp/~amslab/
( デイビー日高 )
- ページの先頭へ-
|