記事検索 |
最新ニュース |
|
|
|||||||||
|
IHI、バラ積みの物体も高速で判別可能な三次元物体認識技術を開発 |
|||||||||
|
|
|||||||||
|
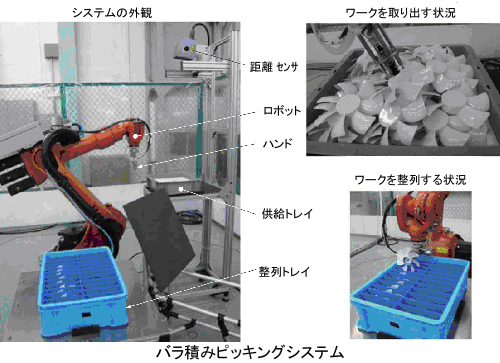
株式会社IHIは、バラ積みされた物体を高速で認識、ピッキングが可能になる産業用ロボット向けの三次元物体認識技術を開発した。 従来のカメラによる認識方法では周囲の明るさの影響や、実物の撮影が必要など手間がかかるうえ、二次元画像で認識するため、限られた形状の物しか認識できなかった。また、レーザーによる三次元計測ではデータ量が多く複雑な計算が必要で、対象物がバラ積みされたピッキングシステムなどでは認識に時間がかかり生産設備への適用が進んでいなかったという。 今回IHIは、東京大学大学院情報学環 池内研究室の協力を得て、独自のアルゴリズムを開発。まずバラ積みされた対象物を三次元レーザーセンサーで計測し、計測点群で構成される計測結果を作成。これをあらかじめ点群データに変換しておいた対象物の3D-CADデータと比較し、一致すると思われる位置・姿勢を検出。各点が対応する点を求めることで物体の形状を認識する。これにより、同一形状の部品が混在するなかで、どこまでが1つの部品であるかを短時間で認識し、複雑な形状の物体も高速で認識できるという。 これにより、CPUファンのような形状の複雑な対象物がバラ積みされた状態で2秒程度、バラ積みされたM20(直径20mm)ボルトでは1秒程度で正しい認識が可能になった。 同社では今後、セル生産など多品種少量生産における自動化に対応させるため、さらなる高速化と安定化を図り、今年度上期にはシステム化を目指すという。また、外販も行ない、本年度中にFA・生産分野への応用製品を中心に展開していく方針。
■URL IHI http://www.ihi.co.jp/ ニュースリリース http://www.ihi.co.jp/ihi/ihitopics/pressm/10116.html
( 清宮信志 )
- ページの先頭へ-
|