記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||
|
ターンやジャンプを試みるヒューマノイド |
||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||
|
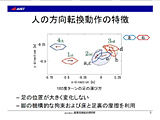
兵庫県にある神戸大学で開催された「第26回日本ロボット学会学術講演会」の二足歩行ロボットのセッションで、独立行政法人産業技術総合研究所(産総研)と川田工業が開発した研究プラットフォーム用ヒューマノイドロボット「HRP」を使った研究が発表された。そのうち2件の発表の内容を簡単にご紹介する。 ● 両足裏の滑りを利用したターン 産総研の知能システム研究部門ヒューマノイド研究グループ研究員の三浦郁奈子氏は、両足の滑りを利用したターン動作について発表した。同グループでは現在、「HRP-4」という女性型ヒューマノイドを開発中で、日本人の平均体型データに近づけることを目標としている。外形だけではなく歩き方も人間のような歩行を目指し、そして自然なターンを目指したという。まず「ウォーキング・スタジオ・レイ」の協力を得て、人間の方向転換の特徴を掴んだそうだ。人間は現在のHRPのように足を何度も踏み変えながら方向転換するのではなく、少ない踏み換え回数で大きな回転角を実現している。それをよく見ると、足の位置そのものはあまり変化させず、足裏を滑らせてクルッとターンしていることが分かる。つまり人間のようにターンするのであれば、脚の機構的な拘束を利用しつつ、足裏と床面の滑りを使ったターン運動を実現させなければならないというわけだ。
滑りを考慮した先行研究はいくつかあるが、それらはスリップからのリカバリーや転倒の予測というものが多い。一部スリップ利用のターン動作の研究もあるものの、積極的なスリップの利用にはまだまだ研究の余地があるという。 スリップを利用するためには、滑り現象のモデル化と所望の回転量を生成するための動作計画が必要だ。ロボットの足を前後に開いた状態から、足をひねりながらそろえていくと、それに応じて回転が起こる。つまり、大きく開いたものを閉じれば大きく回転する。三浦氏らは滑りを利用した回転運動モデルを立てるために、「足裏全体の仕事量が最小になるようロボットが回転する」という仮定を立ててモデルを作り、シミュレーションと実機実験を行なったそうだ。すると、数学的に足の軌道が決まると、足裏と床面の摩擦係数に関係なく、同じ回転角になるということが分かったという。ただ、実機実験では足腰の負荷を減らすため、足裏と床にプラスチックの板を張って摩擦係数を0.23前後にして行なっている。 このような動きは二足歩行ロボコンの「ROBO-ONE」では比較的よく見られる。だが、あまりきちんと解析された例はまだ少ないし、等身大のヒューマノイドで行なわれた例はない。また今回の映像を見ると分かるように、足先の重心移動を巧みに利用してほとんど足の位置を変えることのない人間のターン動作とは、まだだいぶ違うものだ。今後は、より複雑な足運びによる滑らかなターン動作の生成、手足や上体を利用した動的なターンの実現を目指すという。
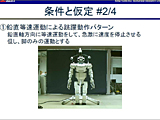
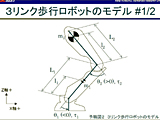
● HRP-3による垂直ジャンプ 同研究グループの金子健二氏は、「二足歩行ロボットの鉛直軸等速度運動による跳躍動作の一考察」と題して、ヒューマノイドによる鉛直ジャンプの発表を行なった。金子氏ら産総研のヒューマノイド研究グループは、これまでHRP-2、HRP-3P、HRP-3と研究開発プラットフォーム用ヒューマノイドを開発してきた。また、ヒューマノイドロボットの跳躍や走行については産総研のほか、ソニー、ホンダ、トヨタなど各メーカーから発表されている。では、与えられたハードウェア資産が実現可能な跳躍量、すなわち既存のロボットハードウェアがどのくらいジャンプできるのかを、求めることはできるのだろうか。また、その跳躍量は、ロボットのどのパラメータと関係があるのだろうか。それが分かれば、どのパラメータを変えると跳躍量をより伸ばすことができるのかが分かる。なお、この発表での跳躍量とは、重心位置が鉛直上向きに上がった量のことを指す。 ロボットのジャンプは、鉛直軸の離陸速度を上げれば上げるほど高く上がる。金子氏は足のみで運動した場合の動画を見せ、その後に数式を解説した。ロボットに鉛直軸方向に等速運動をさせて、急激に停止させる。つまり膝伸展運動を急激に停止させることで約3.4cm、跳躍時間0.167秒のジャンプを実現している。 さて、ロボットのモデルは太ももリンクと脛リンクの長さは同じで、ロボット全体の重心は股関節位置に集中している。そして関節はバネなどを使わずアクチュエータのみで駆動しており、減速比は一定と仮定する。そして膝速度が求まると跳躍可能速度が決まる。膝関節の運動方程式からジャンプ時(膝伸展を急停止させたとき)の膝関節角度と跳躍量の関係式を導いて検証したところ、減速比を変えてもある範囲内であれば、あまり最大跳躍量は変わらないことが分かったという。 なお上半身の運動も考慮した場合はどうなるのかは今後の課題であり、効率を考慮した減速比の選定方法などと合わせて研究を進めていくそうだ。
■URL 独立行政法人産業技術総合研究所知能システム研究部門ヒューマノイド研究グループ http://www.is.aist.go.jp/humanoid/index_j ■ 関連記事 ・ 「第26回日本ロボット学会学術講演会」が開催 ~展示ブースレポート(2008/09/16) ・ 「次世代スパコン」の脳神経系シミュレーションがロボットを変える ~第26回日本ロボット学会学術講演会 特別講演レポート(2008/09/12)
( 森山和道 )
- ページの先頭へ-
|