記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
「IDF 2008」にみるIntelのロボット研究 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
米Intelは2008年8月19日~21日に、開発者向け会議「IDF(Intel Developer Forum) 2008」を米国カリフォルニア州サンフランシスコ市Moscone Center Westで開催した。本レポートでは、IDF 2008に登場したロボット関連の講演や展示などを紹介する。
Intelが研究しているのは家庭やオフィスなどで使える汎用ロボットである。最初に披露されたのは自律移動型のロボットで、1本の腕とカメラを備えており、車輪で走行する。椅子やテーブルなどの障害物を認識し、障害物を避けて走行する。講演では、マグカップを認識したロボットが腕先の指(3本指)でカップを掴んで持ち上げ、ロボットの側面のポケットに置いて放すという動作が実演された。
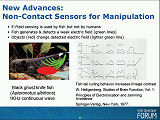
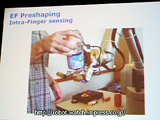
次に紹介されたのは、近接センサーを備えたアーム型のロボットである。近接センサーとは接触する直前に物体を検知するセンサー(「プリタッチセンサー」と呼んでいた)のことで、ロボットが物体を掴む直前に存在を検知する。この結果、物体を柔らかく掴むことができる。講演では、果物のリンゴや人間の肘などを掴んでみせていた。
基調講演終了後の技術セッション「Robotics at Intel」では、これらの2種類のロボットの詳細が技術開発者によって説明された。 自律移動型のロボットを開発しているのはピッツバーグの研究チームで、米Carnegie Mellon UniversityのQuality of Life Technology Centerと共同で開発を進めている。近接センサーを備えたアーム型のロボットを研究しているのはシアトルの研究チーム。同チームは米University of Washingtonと共同で開発を進めている。 技術セッションでは始めに、ピッツバーグの研究チームに所属するDave Ferguson氏がIntelのロボット研究の全体像を説明した。
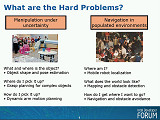
まずIntelが研究しているロボットは、「パーソナル・ロボット」だという。パーソナルとは、パーソナル・コンピュータ(PC)と同様に個人が利用するという意味である。 すでに工業用ロボットは企業の生産現場で大量に使われている。パーソナル・ロボットと工業用ロボットの大きな違いは、利用環境にある。工業用ロボットは使われる環境があらかじめ決まっており、何をするかも決まっている。確定した環境で確定した動作を実行するのが工業用ロボットである。 これに対し、パーソナル・ロボットは家庭やオフィスなどで使われるため、環境と動作が固定されていない。家庭やオフィスなどには人間がおり、常に移動している。椅子や備品などの位置も定まっていないので、揺れ動く不確定な環境でロボットは自分の位置を把握し、適切な経路を移動する必要がある。そして例えばテーブルのマグカップを片付ける動作をロボットにさせようとしても、マグカップの位置や置き方は一定していない。すなわち動作の詳細は定まっておらず、常に変動する。この不確定性(Uncertainty)こそが、パーソナル・ロボット開発の最大の課題だと述べていた。
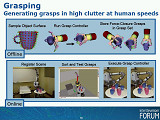
ピッツバーグの研究チームは最初のステップとして、「Robotic Busboy(給仕見習いロボット)」と呼ぶロボットを開発した。3本指の手と1本の腕と備えた固定ロボットと、テーブルと車輪を備えた自律移動式のロボットの組み合わせである。 自律移動式ロボットは、テーブル上に集められた汚れた食器(マグカップ)を運ぶ。固定ロボットは、集められたマグカップを食器洗い器のカゴに入れる。マグカップを掴む動作の速度が人間と同様であること、マグカップを運ぶ腕の動きがほかの食器に衝突しないこと、といった要求を満足させる必要がある。
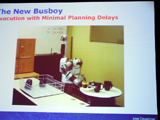
ここで講演者がSrinivasa氏に代わり、動作速度を改良した「New Busboy」ロボットを説明した。なお繰り返しになるがRattner氏の基調講演では、腕の部分と車輪を一体化した、別タイプのロボットを披露していた。技術セッションでの説明はなかったが、基調講演で披露されたタイプが最新型だと思われる。
ロボットに搭載した近接センサーは電界センサーなのだが、これは「ブラック・ゴースト・ナイフ・フィッシュ(Black Ghost Knife Fish)」と呼ぶ魚(ウナギの一種)が備えている交流電界センサーと類似のものだという。この電界センサーをロボットの手のひらと指に備えることで、物体の形状を認識して指の開きを調整する。また力覚センサーも備えており、物体を掴む強さを制御している。このため、人間が腕をロボットの手のひらに差し入れても、適度な強さで安全に掴まれる。
このほか併設の展示会では、スペインのPal Technologyがヒューマノイドロボット「REEM-B」を動作展示していた。「REEM-B」は展示ブースのフロアをゆっくりと二足歩行しており、来場者の注目を集めていた。
また米MobileRobotsは、小型の車輪で自律走行するガイドロボット「GuiaBot Robotic Kiosk」を展示会場で走行させていた。「GuiaBot Robotic Kiosk」は円筒形をしており、カメラで人間やテーブルなどの障害物を認識して自動的によけながら、かなりの速度(人間の歩行速度よりも少し早いくらい)で走行していた。
■URL Intel http://www.intel.com/ Personal Robotics http://personalrobotics.intel-research.net/
( 福田 昭 )
- ページの先頭へ-
|