記事検索 |
最新ニュース |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
東大オープンキャンパス2008開催 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
7月31日、東京大学の本郷キャンパスにおいて「東京大学オープンキャンパス2008」が催された。ここではオープンキャンパスで公開されていた数多くの研究から、特に弊誌に関係するユニークなロボットや技術について紹介する。 ● 試作2輪ビークルがキャンパスを走り回る まず工学部のキャンパスで記者が遭遇したのが、2輪倒立しながらスムーズに移動できるユニークなビークルだ。これは東大のIRT研究機構と鎌田・小竹研究室が共同で開発しているパーソナルモービル【写真1】。お馴染みの「Segway」やトヨタの「Winglet」と同様に、このパーソナルモービルも2輪スタイルをとっているが、最大の特徴は座りながら機体を容易に操作できる点にあるという【動画1】。また前後にも車輪付きのアームがあり、これによって段差などもうまく乗り越えられるようだ。現時点ではまだ正式に発表されていない試作機であるため、原理や機構などの詳細については秘密とのこと。今秋には正式なアナウンスがあるというので、楽しみに待ちたい。
計数工学科のシステム情報工学コース(原・津村研究室)では、「制御:動きをデザインする科学」をテーマに、不安定なシステムを自動制御技術によって安定化させる研究を紹介していた。たとえば振子を逆さに立てる倒立振子の実験機や、珍しい丸太乗りの曲芸ロボットのデモンストレーションが行なわれていた。これらは物理理論の理解と実践を目標に開発された教材で、モデルベースの開発と状態空間表現による制御を理解するためにつくられたものだという。 倒立振子の実験は、台車を前後に振りながら振子を立てるという一般的な制御ではなく、シーソーの上で台車がバランスをとり、さらに台車上の振子を倒立させるという難易度の高いもの【写真2】。その一方で見た目にもインパクトがあったのが、丸太乗りロボットによるデモンストレーションだ【写真3】。 こちらのロボットは名前のごとく、サーカス芸人のように親機の丸太ロボット(車輪)上で子機ロボットが乗り、うまくバランスをとって動いたり、静止することができるもの【動画2】。丸太の車輪にはジャイロが付いており、角速度(回転角)を検出できる。さらに無線通信によってそのデータを丸太上の子機側に飛ばし、うまく静止するように制御するという仕組み。将来的には、子機上にも倒立振子を乗せて制御することも考えているという。
また精密工学科の大田研究室では「自律移動ロボットの行動制御」に関するデモが行なわれていた【写真4】。この研究ではロボットの動作計画手法の問題を取り扱っている。複数のロボットを使って、ある物体を目標となる位置に運ぶ際に、できるだけ短時間で運べるような順序の最適解を求める。その際に複数台のロボットの経路計画をまとめて考えると、数え切れないほどの組み合わせになってしまうため、問題を切り分けて計算量を減らす工夫をしているそうだ。 たとえば、ロボットが3台あって12個の物体を運ぶ場合、それぞれのロボットのテリトリ(作業領域)を陣取り合戦のように決めていき、その境界線上でロボット同士が物体を受け渡すことにすれば、問題も比較的簡単になるという【動画3】。実際のロボット本体は市販部品を組み合わせて製作し、ロボットの自己位置同定は壁にあるランドマークをレーザーレンジファインダでセンシングして相対的な位置を求め、それをベースに自己位置を決める。 また、このセンサーによって物体の受け渡しのタイミングや、物体が置かれた場所なども分かるようにしているという。このような研究は、工場内の部品搬送などにおいて、AGV(無人搬送車)の経路設定をせず、多品種・多目的の供給が可能なシステムとして応用できるだろう。
● ネズミの脳の神経信号を計測してクルマを動かす! 計数工学科のシステム情報工学コース(満淵研究室)では、近年注目されているBMI(Brain-Machine Interface) をテーマに、とても興味深い研究を公開していた。BMIは、生物内部で情報伝送を担う神経系に着目し、機械との直接接続を行なうサイボーグ工学のひとつ。このようなBMI技術が進展すれば、脊髄損傷や麻痺など神経系機能が損なわれた人に対して、自分の意思で下肢を動かせるパワースーツのようなツールなども実現できる。同研究室では、あたかも自分の手で触れているように触圧覚を感じ、運動神経信号によって自由に動かせる次世代義手システムや、その基盤技術となる神経電極の研究などを紹介していた【写真5】【写真6】【写真7】。 さらに興味深かった研究は、ラットの大脳(運動野)から計測した多チャンネル神経信号によって、車両を制御できる「ラットカーシステム」だ【写真8】。これも自分の思い通りに動かせる義肢やクルマイスの応用を目指すための研究の一環だという。 具体的には、ラットの後足の運動指令を出す大脳皮質運動野に神経電極を埋め込んで信号を計測し、ラットが後足を動かそうとする意図に応じて、ラットカー駆動輪の回転を変化させる実験を試みたそうだ。写真8のような回転カゴによる実験システムと、ラットがクルマにのって操縦するラットカー【写真9】を紹介していた。 ラットカーは実際にラットと車体を移動できるため、ラットが自らの肢で移動しているような体感を持たせることできるという。ラットの意図どおりに動いているかどうかは、餌づけなどをして、その行動を評価するそうだ。
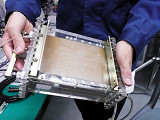
● ユニークな医療ロボットで、神の手クラスの手技を実現 産業機械工学科の光石・杉田研究室では、ユニークな「ロボット手術システム」が公開されていた。特に、低侵襲腹腔鏡下手術ロボット、高精度人工膝関節置換用の生体適合型ロボット、深部脳神経外科手術支援ロボットなど、珍しい医療ロボットが目を引いた。最近では、腹などに3つの穴を開けて、そこから患部を摘出する腹腔鏡手術が広く行なわれるようになっている。従来のようにメスで大きく開くのではなく、小さな穴で低侵襲な手術が可能なため、患者のダメージが少ないというメリットがある。とはいえ、このような腹腔鏡手術は熟練した医師による高度な技術を要する。 低侵襲腹腔鏡下手術ロボットは、2本の鉗子用と1本の腹腔鏡用の合計3本のアームを備えており、術者が腹腔鏡の映像を見ながらマスターマニュピレータを操作するもの。この一連の操作は、スレーブ側のマニュピレータに取り付けられている鉗子と腹腔鏡に伝わり、正確な遠隔手術を実現する。微細な操作が要求されるため、マスター側とスレーブ側の動きの比率を変えて、手ぶれの影響を小さくできるようになっている【写真10】。 執刀医が手術中に鉗子を静止させることは至難の業だが、このロボットでは、フットスイッチによってスレーブ側のロボットの動きを容易に制御できる。このロボットによって、すでにブタの胆嚢摘出の遠隔手術(東京大学ー静岡県の病院)を4度も成功させているという【写真11】【写真12】。
高精度人工膝関節置換用の生体適合型ロボットは、人工関節を患者の骨に埋め込む際に、患者の骨を正確に削ることを目的に開発されたもの。従来の手術では、まずX線やCTによって患部の様子を調べた後で、執刀医が患部を開いて骨を削っていくという流れだった。実際に患部を開いてから、執刀医の経験と勘が頼りとなり、高度な技術が要求される。このロボットでは、事前に調べたX線やCTのデータをベースにして、ロボット側にデータを送り、自動的に骨を削ることができる。術前の計画、術中のサポート、術後の歩行動作解析までをワンストップで行なえる【写真13】。人体標本による実験ベースでは、医師よりも正確に骨を削ることができたそうだ【写真14】。 通常の手術では不可能とされる「神の手クラス」の手技を実現する世界初の深部脳神経外科手術支援ロボットが「マイクロサージャリーロボットシステム MM-1」だ【写真15】。前述の低侵襲腹腔鏡下手術ロボットと同じような仕組みだが、脳の手術は他の臓器よりも特に神経や血管が密集する部位であるため、術者が操作するマスター・マニュピレータ【写真16】と、患部で正確な動作が可能なスレーブ・マニュピレータ【写真17】のほか、高精細映像のハイビジョン技術を応用した立体視ビデオ顕微鏡システム【写真18】も用意されている。 単に遠隔手術ができるだけでなく、術者が目にするものと同じレベルの画像を共有することも可能になるという。この手術支援ロボットは、愛・地球博やテレビ番組でも登場したことがあるため、ご存知の方も多いかもしれない。
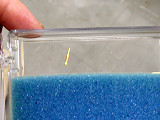
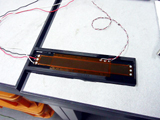
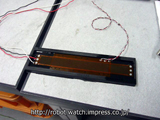
● MRIの強磁場環境下で利用できるアクチュエータの開発も 精密工学専攻の樋口・鳥居・山本研究室では、さまざまなメカトロニクスの要素技術を幅広く研究している。たとえば研究の1つとして、高精度な静電容量式フィルムエンコーダ【写真19】やMRIコンパチブルの静電アクチュエータ【写真20】が公開されていた。前者は静電フィルムを用いたリニアエンコーダで、発生する正弦波同士を合成することで、0.8μmという超高分解能を実現している。一方、後者は3相交流によって誘導されて動く軽量・薄型のリニアモータだ。非磁性材料だけで構成でき、高電圧・小電流で磁場の発生が少ないという特徴がある。そのため電磁モータが利用できないような場所、たとえばMRIなどの強磁場環境下で利用できるというメリットがあるそうだ【動画4】。 静電フィルム同士は、高電圧を掛けても耐えられるように「フロリナート」(フッ素系不活性液体)と呼ばれる絶縁液で保護されている。この静電フィルムは積層することができ、何枚も重ねることで大きな力を発生させられるという。10×15cmのフィルムを100枚ほど重ねると、30kgまでの重量を持ち上げられるようになる【写真21】。このほかにも静電フィルムアクチュエータを用いたジョイスティック型2自由度ハプティックデバイスも展示されていた【写真22】。
■URL 東京大学オープンキャンパス2008 http://www.u-tokyo.ac.jp/event/oc/opencampus2008.html
( 井上猛雄 )
- ページの先頭へ-
|