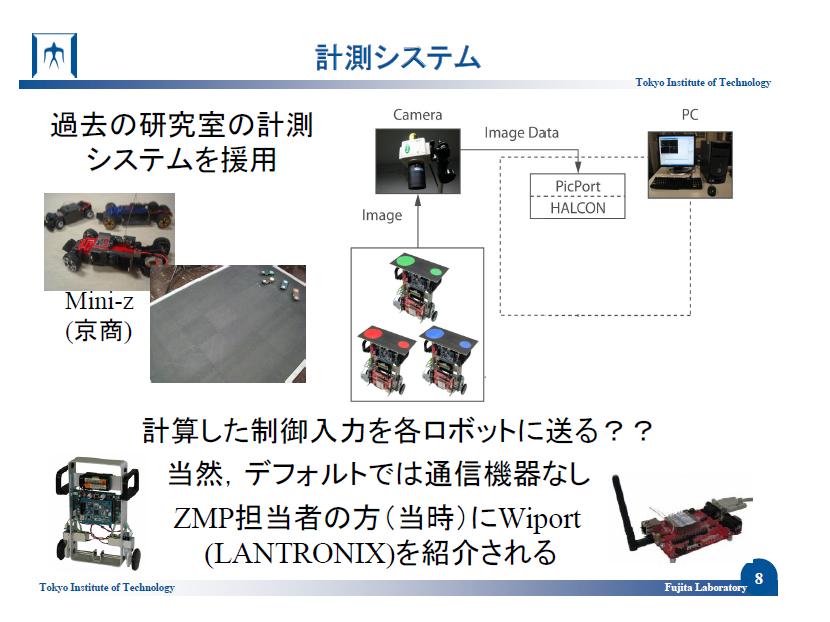
【写真36】複数ロボットの協調制御実験システム。フィールド上部にカメラを設置し、その画像情報をPCで処理し、抽出情報をもとに制御入力を計算。その結果を無線通信を介してロボットに送信して制御する仕組み。画像処理にはHALCONのライブラリーを利用