第5回「モノラボ・テクノ・フォーラム」レポート
~知能ロボット最前線 ロボカップの進化と共創知能プロジェクト
3月18日(水)、大阪工業大学大宮キャンパスにて第5回「モノラボ・テクノ・フォーラム」が開催された。主催は大阪工業大学モノラボ。
モノラボとは、大阪工業大学が大宮キャンパス内に開設した「ものづくりセンター」である。設計や造形などの最新機械と設備が設置されており、工学部の授業だけでなく、ロボット競技会に参加する学生や近隣住民に開放している。また、技術者や開発者を招きもの作りをテーマとした「モノラボ・テクノ・フォーラム」を定期的に開催している。
今回は、ゲストスピーカーに知能ロボット研究の第一人者で、「ロボカップ」設立者の一人でもある浅田稔氏(大阪大学大学院工学研究科教授、JST ERATO 浅田共創知能システムプロジェクト総括)を招いた。
浅田氏は、今年で13回目の開催となるロボカップがどのように進化してきたのかを解説。そしてロボカップが最終目標としている、人間とロボットの協調を実現するために必要な知能ロボット研究の現状とロボカップの役割などについて紹介した。会場には、一般社会人と、卒業式前日にもかかわらず100名以上の学生が会場に集まり、ロボカップの発展に伴いロボットが進化してきた過程や知能化技術について興味深く聴聞した。
 |  |  |
| 浅田稔氏(大阪大学大学院工学研究科教授) | 多くの学生が参加した | 大阪工業大学 |
●ロボカップ13年間の目覚ましい進化
「ロボットという言葉には魅力があり、多くの方が様々な思いを持っている。しかしながら現実のロボットテクノロジーと、一般の人たちが期待するSFやマンガに出てくるロボットのギャップがあまりに大きくて、過度な期待と失望を繰り返してきた」と浅田氏は語った。
大学では論文を書くためにロボットを使った実験を行なうが、極端な話10回試験して1回動いたデータでも通用してしまう。そうではなくて、ロボットを10回動かしたら、10回結果を出す。それも環境が整った実験室ではなく、どこでも動くようにしなくてはならない。この問題を一人一人が悩むのではなく、「一緒に面白いことをやりたいな」と考えて始めたのがロボカップだという。
ロボカップは、困難なテーマにチャレンジし、その結果として世の中の役に立つモノを生み出すランドマークプロジェクトという位置づけだ。最終目標は、“2050年の人間のワールドカップチャンピオンチームに勝つヒューマノイドチームを作ること”としている。そういうことができるくらいにロボットの技術が高まれば、いろいろな要素技術が我々の生活の中に入ってくるという考えに基づいている。
第1回大会は、1997年に名古屋で人工知能の国際会議と併催で40チームが参加し初開催した。この時には、シミュレーションリーグが多かったそうだ。その後、リーグ数も参加チーム数も増えた。運営上、出場チームをこれ以上増やせないところまでできているため、グラフではこの数年増加していないように見えるが、潜在的には世界中にもっと多くのチームがおり、全世界で40万人くらいの参加があるそうだ。中でも中国は、ロボットが科学技術振興に有益だと政府が非常に力を入れており、とても熱心に参加しているという。
第1回大会当時は、ほとんどのロボットが動かないので来場者から「試合は始まっているんですか?」と聞かれたそうだ。浅田氏は「5台のロボットを同時に動かすというのは、技術的に非常に厳しかった。1台を動かすのも難しい時代だった」と、当時を振り返る。
 |  |
| サッカーやレスキューをテーマにし、知能ロボット研究を世界規模で進めるランドマークプロジェクト | サッカーだけではなく、レスキューやジュニアもあり、産業への応用を目指している |
 |  |
| ロボカップでは、自律性の高いロボットを主体としている | 参加チーム数の推移 |
ロボカップでは、前述のとおりサッカーをテーマとして人間とロボットの協調を最終目標としている。そこでまずはロボット間の協調をやろうというこで、ロボット同士がサッカーの試合をしている。
当初は、シミュレーションリーグの他、小型リーグと中型リーグの3リーグでスタートした。
小さなロボットで完全自律型は難しいため、小型リーグでは天井カメラを使い中央集権制御でロボットを動かしている。ロボットの上にマーカーがついており、カラー画像処理でロボットの位置を検出し、敵味方とボール、ゴールを見分けている。つまり頭脳は1つでボディが複数あるわけだ。
第2回目のパリ大会までは、人間がリモコンでロボットを操縦するとロボットチームに勝ててしまうレベルだったそうだ。ところが1999年になると、もう人間では太刀打ちできないレベルになった。
この年に米国のコーネル大学がロボカップを教育として捉え、機械工学科と電気とビジネススクールの学生を合わせて、限られた予算でどれだけのことができるかとロボットを設計してきた。チーム内で、2つのロボットチームを作って開発を競わせ勝った方を世界大会に連れてきて、初出場初優勝した。
この時から小型リーグに関しては、人はロボットに敵わなくなっているそうだ。当初はフィールドサイズも卓球台くらいのサイズで、四方を壁に囲われていた。そのためビリヤードのような壁パスもできたという。それが今では、面積が約5倍となり、天井のマルチカメラは2台になった。また、壁もなくなったため、フィールドラインからボールがでないようにするなどの要素技術も要求されている。ロボットのスピードが非常に速いので、ある意味で熟成したと言われているそうだ。
 |  |
| 小型リーグは、天井カメラで遠隔知覚を行ない中央集権制御をしている | 天井カメラでエリア内のロボットを見たところ |
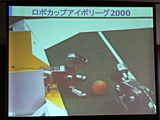
中型リーグは、ロボットのサイズが4~50cm位と大きく完全自律分散型制御になっている。ボールは4号球を赤く塗って使用している。パリ大会の動画を見ると、ドイツのゴールキーパーが道を空けてくれたおかげで、浅田研チームのゴールが決まっている。これが当時のベストショットで、ロボットが一番よく動いている場面だという。
この時使ったカメラは画角が60度位で、自分の周囲がたった1/6しか見えないため、すぐにボールを見失ってしまったそうだ。人間なら見失っても、ボールがどこにあるか推察できるが、ロボットは30msec毎でしか画像処理をできないため、一旦ボールを見失うとそれで終わってしまう。
そこで全方位画像カメラを作ったという。これは、上についている円錐形の鏡をテレビカメラが下から覗き込んで撮影している。この鏡によって周囲を360度全て見るので、自分がフィールド内のどこにいるのか分かり、ボールも見失わない。
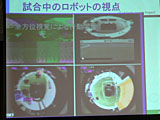 |
| 【動画A】ロボットの視点 |
【動画A】が試合中のオンボードの画像だ。右下はゴールキーパーで、黄色いゴールを背にして真ん中に立っている。この時は味方が敵フィールドを攻めているため、ゴールキーパーはほとんど動かない。右上と左下がフォワードプレイヤーで、右上は全方位カメラと通常カメラの2台を持っている。動画は、左下のフォワードプレイヤーがキーパーチャージを取られて退場と言われている間に、右上のプレイヤーが赤いボールを見つけてシュートする場面だ。
中型リーグも非常に進化が激しく、今では全方位画像も多くのチームが使っている。それ以外にも切り返しをせずに全方向に移動できるよう3輪の移動台車を使い、瞬時にして高速転換できるオムニホイールが採用されるなど要素技術が研究されている。
 |  |  |
| 中型リーグは、完全自律分散制御で実施 | 【動画】1998年パリ大会でロボットが一番動いていたシーン | 【動画】2年後のメルボルン大会でここまで動くようになった |
 | 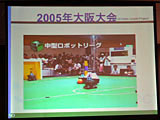 | |
| 中型リーグのロボットに搭載した全方位画像による位置同定 | 【動画】2005年大阪大会では、スピードも戦術も段違いに進化している |
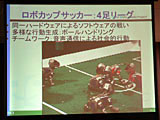
もう廃止されたが、ハードウェアを一緒にしてプログラム技術で競う四足歩行リーグが1999年に始まった。AIBOは当時25万円で、おもちゃとしては高価だが研究用としては格安で非常に優れたプラットフォームだったという。
初めて四足歩行リーグを実施した時には、各チームの動きはよくなかったそうだ。AIBOは鼻の先にCCDカメラがついているが、画角は43度と狭い。ジャイロセンサーが入っていて転倒を検出するが、転倒を回避するほど正確には動けない。ロボットは赤と青のユニフォームでチーム分けされているが、CCDカメラの性能が弱いものだから、ボールしか検出できない。そのため、チームワークも何もなくボールをみてゴールするという感じだったそうだ。
「四足歩行リーグもたった1年で、試合内容が激変した」と浅田氏はいう。
2000年にオーストラリアのニュー・サウス・ウェールズ大学が、前足の膝を折って匍匐前進させたのだ。すると重心が低くなり倒れ難くなる。頭を下げているため足下のボールを見失うことがない。普通にボールを蹴ると、ちょっとずれただけでどこに飛んでいくか分からないが、足でボールを押さえて、非常に正確で早いヘディングシュートをし、決勝戦では10-0で圧勝した。これについて他のチームから「ホールディングじゃないか」とクレームがついたそうだ。しかし協議の結果「前足だから、OK」ということになったらしい。そこで翌年から、全チームが同じプログラムを使ってきて同じ歩き方をするようになった経緯がある。
というのも、ロボカップは競技会が終わった後に、国際会議を開いて技術の情報交換をしているためだ。すると共振化現象というのが起こり、どのリーグも毎年どんどん技術が上がってくるという。
 |  |  |
| 【動画】1999年に初めて四足歩行リーグを実施。四足歩行リーグは同一ハードウェアを用い、ソフトウェアの性能を競う | 【動画】2000年には、出場チームのほとんどが同じモーションで試合をするようになった | 【動画】2005年大会風景。四足歩行リーグは、見た目に可愛らしく分かりやすいため、観客にも人気が高かった |
2002年には、いよいよヒューマノイドリーグが始まった。最初は試合ができるレベルではなかったため、PK戦を行なっている。この時、浅田研のロボットは、ボールが飛んでくる方向を右か左か判断してロボットが飛んで防いだ。実は飛んだ後に左肩を脱臼して、その後は使い物にならなかったそうだ。「ロボットは痛みを感じないけれど、私は痛かった」と浅田氏は苦笑いをする。ロボットのべースは富士通のHOAPを使っていて、本体価格が550万、改造費は100万程掛かっていたというから無理もない。
ヒューマノイドリーグには、2004年からTeam OSAKAが参戦し圧倒的な強さで優勝した。2002年の時は、リモートブレインや電源を外から供給することを許可していたが、2004年以降は完全自立型とし、バッテリやCPUも全てオンボードにして外から何も供給しないことにした。
 | 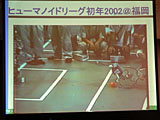 |  |
| 2002年よりヒューマノイドリーグがスタートした | 【動画】初のヒューマノイドリーグはPK戦で勝敗を競った | 【動画】2004年以降はTeam OSAKAが大活躍し、連勝を飾った |
2007年のアトランタ世界大会では、人間と中型リーグの優勝チームが実際にゲームをしたという。ロボットチームは人間チームと戦うことを想定したプログラムはされていないため、基本的にボールを追いかけることしかできない。スローインはできないためフリーキックだが、誰がキックするかは自動的に決められてプレイヤーがやってきてキックしている。最後のシーンでは、人のシュートをロボットキーパーが見事にセーブしている。
 |  |
| 【動画】昨年の世界大会エキシビションで、中型リーグロボット VS 人でゲームを実施 | 二足歩行ロボット「Nao」を使った共通プラットホームリーグも始まった |
●認知発達ロボティクスの取り組み
これまで紹介したようにロボカップを通じて、ハード面はものすごい勢いで進化している。しかし、知能の部分に関しては、シミュレーションリーグでは学習とか発達などアルゴリズムを入れており、実機にも多少は搭載されているものの、設計者が明示的に書かなければならない現状にある。
「そうではなくて、ロボット自身が理解の過程を自ら探し、学習発達していくということを狙いとし、そのことにより人間の知能というミステリーに迫りたい」と立ち上げたのが、浅田共創知能システムプロジェクトだ。
人のように自律的に動くロボットを作るために知能の部分をどう研究していくか考えた時、人間の知能そのものを知る必要があり、ロボットを通じて人間の心を理解する研究を始めたわけだ。
 |  |  |
| 脳科学の発達により、基本構造については理解が進んできた | “人の賢さ”を知るために、赤ちゃんの発達が手がかりになると考えた | 様々な分野の研究と連携して、ヒューマノイド・サイエンスを進めていく |
 |  |  |
| 認知発達ロボティクスとは? | ロボットをつくり動かして、人間の不思議に近づく | 関連書籍「やわらかな遺伝子」 |
 |  | |
| 「認知発達ロボティクス入門書」 | 「ロボット未来世紀」 |
同プロジェクトは、複数のグループから構成されているという。1つ目は「身体的共創知能」として運動の発達から認知の発達への繋がりを研究している。2つ目は「対人的共創知能」といい、赤ちゃんロボットや胎児シミュレーションを使い、お母さんと赤ちゃんがどのように相互作用をしているか研究している。3つ目に「社会的共創知能」があり、石黒浩先生が自分自身のアンドロイドを作っている。最後に脳神経科学のイメージングの研究や臨床検査からそれを構成モデル化などの検証をしているそうだ。
ロボットが感じて、判断して行動するようになった時、ロボットが人間を映す鏡となる。「ロボットをつくって動かすことで、人間の不思議を再発見する。その結果、ロボットを通じてその不思議を解明できるかもしれない」と、浅田氏は期待を寄せている。
 |  | 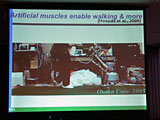 |
| JST ERATO 浅田共創知能システムプロジェクト | 身体・対人・社会という複合的な環境によって知能が発達していく | 【動画】身体的共創知能。人工筋肉を使った歩行の研究 |
 |  | |
| 寝返りやはいはいをするロボットで身体的な発達を研究 | 【動画】対人的共創知能。胎内にいる時も、自分の体を触り感覚運動により学習している |
●ロボカップの教育的効果
講演後、「学生がロボカップに参加することでどのような意義があるのか? 産業にどのように活かされるのか?」という質問があった。
それに対し、浅田氏はロボカップはあくまでもランドマークプロジェクトであって、これ自体で全てをまかなうものではないと前置きして、「今、具体的な産業用途を全て並べることは難しいが、芽は幾つかあると思っている」と述べた。
ロボカップで培った運動能力は、いろんなことに役立つだろうから、さまざまなカタチで社会にフィードバックしていくと考えているという。また産業用ロボットだけでなく、我々の日常にロボットが入ってくることを考えた時、人間とのインタラクションをどう考えるかというのは、非常にリアリスティックなテーマとなる。
最近では、ロボットが日常にどれだけ役に立つか試したいということで、ロボカップ@HOMEという競技がスタートした。そこでは、日常生活の中で人間とロボットがどういうカタチで協調しあうかを研究している。
これはドイツの人たちが始めたもので、日本では去年初めて参加チームがあり世界大会で優勝した。
ロボカップの中でそういう取り組みがはじまっていることも、将来的に人間との協調を目指す日常生活ロボットのコンペティションになればいいと思っているという。
参加する学生にとっては、実際にモノを作る・体験することを通じ、身体で覚えていくこと、そういう実体験自体が持っている教育的効果が大きいという。座学でいくら教えても通じないものが、確実に伝わる場というのがロボカップの強みだ。
大学では、機械系と電気系の学生がコミュニケーションをとる場があまりない。しかし、ロボットは機械と電気と情報が一緒にならないと動かないため、ロボットをつくることによって、これら全てを身体で理解できるようになる。するとどんな会社に行っても、人工物を作っている限りは全てに通じる。「ロボットをやっていれば、何でもできる」と浅田氏は言う。
また同じ世代の学生が同じ問題で苦しみ、解決するために英語でコミュニケーションしていることが、社会的勉強につながる。全世界にロボカップを通じて多くの友人ができることが何よりの財産であり、教育としても意味がある。浅田氏自身も、ロボカップで得た一番の財産は、ヒューマンネットワークだという。
何より、ロボカップに出場すると、普通のことではへこたれないタフな精神を育てられる。「学生の方々には、機会があればロボカップに出ていただきたい」と締めくくった。
2009/5/12 15:49