前の画像
この写真の記事へ
次の画像
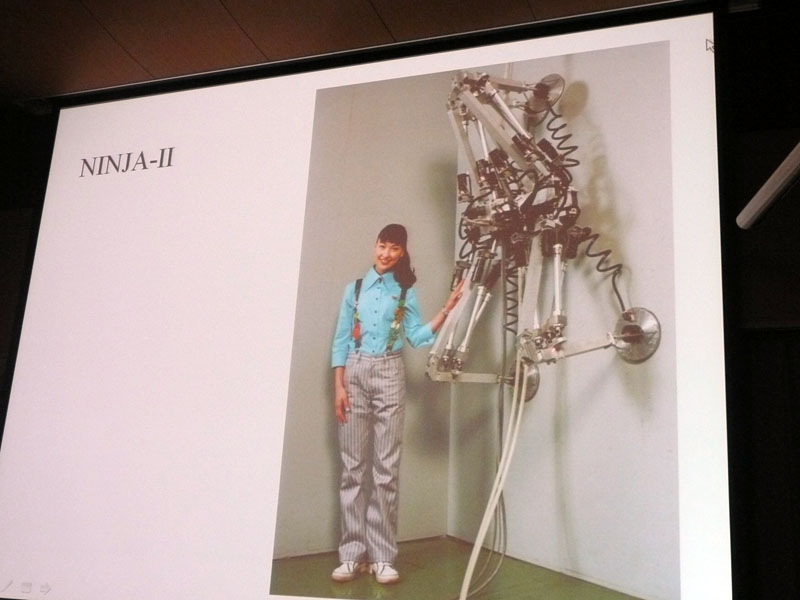
【写真15】3本の直動型アクチュエーターを並列にできるだけ重力方向を向く姿勢に保ち、干渉駆動の効果を発揮させる。写真は、脚機構の稼動範囲を関節を入れることで拡大した壁面移動ロボット「NINJA-II」