石井英男のロボットキットレビュー
姫路ソフトワークス「JO-ZERO」ハードウェア組み立て編(その2)
姫路ソフトワークスから登場した「JO-ZERO」は、全長300mm、重量約860g(バッテリ込み)という、小型で軽い二足歩行ロボットキットだ。これまでの二足歩行ロボットキットとは一線を画す、ロボットとしての「かっこよさ」を追求していることが魅力だ。
今回は、前回に引き続いて、組み立て作業の残りを行なう。
●腕の組み立て
JO-ZEROの組み立て作業は、「下半身組み立て」「胴体組み立て」「腕組み立て」「全体組み立て・配線」の4つのステップに分けられる。前回の記事では、ステップ2の胴体組み立てまでを紹介したので、今回は腕の組み立てから行なう。
なお、初期ロットのCD-ROMに収録されている組み立て説明書には、写真や説明キャプションなどにいくつか細かい間違いがあるが、それらの間違いを修正した組み立て説明書の最新版が、姫路ソフトワークスのJO-ZEROサポートページで公開されている。
また、同サポートページには、専用モーション作成ソフト「JOZコントローラ」の最新版やJOZコントローラのチュートリアル、サンプルモーションのデータ、モーションジェネレータ機能の使い方、赤外線リモコンやホビーロボット用送受信機の利用方法など、高機能なJO-ZEROを使いこなすために役立つ情報が多数公開されている。
サポートページには、かなり頻繁に情報やデータなどが追加されているので、JO-ZEROユーザーはもちろん、JO-ZEROに興味がある人はチェックしておくことをお勧めする。ホビーロボットは、組み立てたら終わりというものではないので、JO-ZEROのようにサポートページが充実していることは高く評価できる。
腕の組み立ては、まず上腕から行なう。右上腕と左上腕では、利用するサーボブラケットが異なるので間違えないようにしよう。前回の記事でも解説しているが、サーボブラケットBとサーボブラケットAは非常に似ている。右上腕にはサーボブラケットBを利用し、左上腕にはサーボブラケットAを利用する。上腕を組み立てたら、前腕を組み立てる。こちらも左右で利用するフレームと親指パーツが異なる。上腕と前腕ができたら、前腕と上腕を合体させれば、腕が完成する。なお、サーボホーンにブラケットを取り付ける際には、サーボホーンの切りかきの位置が説明書の指示通りになっているか、必ず確認すること。
 |  |  |
| 右上腕(第1工程)の組み立てに必要なパーツ。サーボブラケットはBを利用する | サーボモーターのケースビスをすべて取り外し、サーボブラケットBの穴にサーボモーターのケーブルを通す | サーボブラケットBをサーボモーターに装着し、M1.7-23.0ネジ4本で固定する |
 |  |  |
| 右上腕(第2工程)の組み立てに必要なパーツ。先ほどのブラケットにさらにサーボモーターを取り付ける | サーボモーターのケースビスを2本取り外し、サーボブラケットBにはめ込み、M1.7-25.0ネジ2本で固定する | 右上腕(第3工程)の組み立てに必要なパーツ |
 |  |  |
| サーボホーンの切りかきが短辺の中央(銘板とは反対側)に位置するようにして、コの字ブラケットBをはめ込み、M2.0-3.0ネジ4本で固定する | コの字ブラケットBを固定した状態を横から見たところ | 同様にして左上腕部も組み立てる |
 |  |  |
| 右上腕部と左上腕部は、このようにケーブルの出方も左右対称になる | 腕フレームは、左右でネジ穴の位置が違うので間違えないように気をつけよう。この写真で左側が右腕フレーム、右側が左腕フレームだ | 右前腕(第1工程)の組み立てに必要なパーツ |
 |  |  |
| 右腕フレームの内側に赤色の腕パーツAを取り付け、M1.7-3.0ネジ2本で固定する | 右手親指パーツを取り付け、M1.7-3.0ネジ2本で固定する | 腕パーツBをはめ込み、M1.7-3.0ネジ4本で固定する |
 |  |  |
| 腕パーツBを固定したところ | 右前腕フレームにケースビスを2本取り外したサーボモーターをはめ込み、M1.7-25.0ネジ2本で固定する | 同様にして左前腕部も組み立てる |
 |  |  |
| 右腕の組み立てに必要なパーツ。先ほど組み立てた右上腕部と右前腕部を合体させる | サーボホーンの切りかきの位置に注意しながら、右上腕と右前腕部を合体させ、M2.0-3.0ネジ3本で固定する | フリーホーン側もM2.0-3.0ネジ3本で固定する |
 | ||
| 同様にして左腕も組み立てる |
●全体の組み立て
いよいよ、JO-ZEROの組み立て作業も佳境に入ってきた。次は、これまでに組み立てた下半身と胴体、両腕を合体させ、JO-ZEROの全身を組み立てる作業になる。まず、下半身に胴体を合体させて、次に両腕を胴体に合体させる。合体させる際には、サーボホーンの切りかきが正しい位置にあるか、必ず確認しよう。
両腕を胴体に合体させたら、胸部パーツを取り付ける。胸部パーツには、赤いJのマークが別パーツとして用意されており、JO-ZEROのかっこよさを引き立てている。次に、頭部パーツを取り付ける。頭部パーツのデザインは神矢みのる氏によるもので、正統派ヒーローロボットらしい、精悍なデザインだ。また、頭の後ろにはスピーカーが内蔵されており、音声の再生が可能だ。
 |  |  |
| 先に組み立てた胴体と下半身を合体させるのに必要なパーツ | サーボホーンの切りかきの位置に注意して、胴体と下半身を合体させ、M2.0-3.0ネジ6本で固定する | 胴体と下半身を合体させたところ(正面から) |
 |  |  |
| 胴体と下半身を合体させたところ(側面から) | 両腕を取り付けたところ | 胸部の組み立てに必要なパーツ |
 |  |  |
| 胸カバーに赤い胸マークを取り付け、M1.7-1.8ネジ3本で固定する | 胸フレームの出っ張りに胸カバーの穴を引っかけて、胸カバーをはめ込み、M1.7-3.0ネジ4本で固定する | これで頭部以外は完成。胸の赤いJマークがかっこいい |
 |  |  |
| 頭部の組み立てに必要なパーツ | 胴体フレームにヘッドパーツCを取り付け、M1.7-3.0ネジ2本で固定する | スピーカーのケーブルをヘッドパーツCの穴に通して、スピーカーの裏に貼られている両面テープの保護紙を剥がして、貼りつける |
 |  | |
| ヘッドパーツAにヘッドパーツBを取り付け、M1.7-3.0ネジ1本で固定する | 頭部を胴体フレームにはめ込み、M1.7-3.0ネジ4本で固定する |
●コントロールボードの取り付けと配線
残る作業は、コントロールボードの取り付けとサーボケーブルなどの配線だ。コントロールボードのHSWB-03Fを取り付ける前に、付属のマイクロSDカードをPCに接続して、FAT16形式でフォーマットし、付属CD-ROMのHSWB03FDATフォルダ内のすべてのファイルをマイクロSDカードにコピーし、HSWB-03FのマイクロSDカードスロットに挿入しておくようにすること。この作業については、組み立て説明書ではなく、付属CD-ROMの「始めにお読みください.TXT」に書かれているが、筆者はこのファイルを見落としてしまっていた。
HSWB-03Fを背中に取り付けたら、サーボケーブルのコネクタをHSWB-03Fに接続する。コネクタの向きに気をつけよう。サーボケーブルの黒色の線が、HSWB-03Fの外側にくるように接続すればよい。また、サーボモーターの番号と接続するコネクタの対応もしっかり確認しておくこと。
配線が完了したら、余ったサーボケーブルを結束バンドでまとめていく。ケーブルのまとめ方がいい加減だと、見た目もかっこ悪いだけでなく、ケーブルがひっかかってトラブルの原因になる。組み立て説明書では、まとめ方はあまり詳しく説明されていないが、サポートページに、追加説明書として「サーボケーブルのまとめ方ガイド」が公開されているので、それを参考にするとよいだろう。基本的に、腕や足の先端部分からケーブルをまとめていき、余ったケーブルは背面カバー内にまとめて押し込む感じになる。サーボモーターの可動範囲を制限しないように、余裕を持ってまとめるようにする。腕や脚を動かしながら、ケーブルをまとめていくとよいだろう。
サーボケーブルの整理が終わったら、充電済みのバッテリを胸部に取り付け、バッテリのコネクタを電源コネクタに接続すれば、組み立て作業は一通り完了だ。
 |  |  |
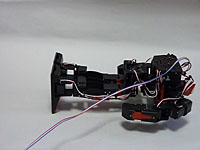
| コントロールボード「HSWB-03F」の取り付けに必要なパーツ | 胴体のサーボケーブルを左右に2本ずつ逃がし、M2.0-12.0ネジ4本とM2.0-8.0スペーサを利用してHSWB-03Fを取り付ける | 結束バンドを利用してサーボケーブルをまとめる |
 |  |  |
| サーボケーブルのコネクタをHSWB-03Fのコネクタに接続する。コネクタは、基板の外側が黒色になるように差し込むこと | すべてのサーボケーブルのコネクタをHSWB-03Fに接続する。差し込むコネクタを間違えないように注意すること | まずは、腕のサーボケーブルを結束バンドでまとめる。腕の先端部分から順にまとめていくのがコツ。各サーボモーターの可動範囲を制限しないように、余裕を持たせること |
 |  |  |
| 脚のサーボケーブルも結束バンドでまとめていく。サポートページで公開されている「サーボケーブルのまとめ方ガイド」を参考にするとよい | 膝からのケーブルと股関節ピッチ軸のケーブルは、股関節ピッチ軸フレームに空いている穴に結束バンドを通してまとめる | 余ったサーボケーブルは、背面部分にまとめて背面カバーを取り付ける |
 |  |  |
| ケーブルをまとめたところ | 背面側の様子 | バッテリは胸部に搭載する |
 | ||
| バッテリのコネクタを電源コネクタと接続すれば、動かす準備は完了だ |
●JOZコントローラの初期設定とホームポジションの設定
JO-ZEROには、専用モーション作成ソフト「JOZコントローラ」が付属しており、モーション作成や高度なプログラミングを行なうことが可能だ。JOZコントローラは非常に高機能で、二足歩行ロボットの肝である歩行モーションを自動生成してくれるモーションジェネレータ機能も搭載されている。JOZコントローラの使い方については、次回詳しく紹介する予定なので、ここでは初期設定の仕方とホームポジションの設定方法のみ紹介する。
JOZコントローラをインストールしたら、PCとHSWB-03Fの高速シリアル端子の間を付属のシリアルケーブルで接続する。最近のPC(特にノートPC)では、シリアルポートを搭載していない機種が多いが、その場合は、USB-シリアル変換アダプタを使えばよい。JOZコントローラを起動したら、まず、初期設定を行なう。初期設定では、JO-ZEROを接続するシリアルケーブルのポート番号を入力する。あらかじめデバイスマネージャで、ポート番号を確認しておくこと。次に、ポジションエディタ画面を開いて、JO-ZEROの電源スイッチを入れ、起動音が鳴り終わったことを確認して、「BOARD Link」にチェックをつければ、JO-ZEROがゆっくりとホームポジションへと移行する。JO-ZEROのサーボモーターは、あらかじめ原点調整済みなので、トリム調整は不要だ。初心者にとって、ホームポジションのトリム調整作業はややハードルが高い作業であり、トリム調整が不要なことは嬉しい。
 |  |  |
| 付属のシリアルケーブルをHSWB-03Fの高速シリアル端子に接続する。赤色の線がスイッチ側にくるように差し込むこと | PCにシリアルケーブルを繋ぎ(シリアルポートがないPCの場合は、USB-シリアル変換アダプタ経由で接続する)、専用モーション作成ソフト「JOZコントローラ」を起動する | JOZコントローラのメインメニュー。起動直後はこの画面となる |
 |  |  |
| まず、「Set Up」をクリックして、シリアルポート番号を入力し、「SetupClose」ボタンをクリックして閉じる | 「POSITION EDITOR」をクリックして、ポジションエディタ画面を開く | 【動画】JO-ZEROの電源を入れると、スピーカーから起動音が流れる。ポジションエディタ画面の「BORAD Link」にチェックを入れると、ホームポジションへゆっくりと移行する |
 | ||
| ホームポジション設定後の様子。サーボモーターの原点はあらかじ設定済みなので、ホームポジションの調整を行なう必要はない |
●歩行モーションやサンプルモーションの実行
最後に、モーションジェネレータ機能を利用して生成した歩行モーションの例や、サポートページで公開されているサンプルモーションの実行例を紹介しよう。歩行モーションの作成は、二足歩行ロボットのモーション作成の中でも、特に難易度が高いが、モーションジェネレータ機能に対応したJO-ZEROなら、いくつかのパラメーターを入力するだけで、最適な歩行モーションが計算によって生成されるので、非常に楽だ。また、執筆時点で公開されているサンプルモーションは全部で5種類だが、これらはJO-ZEROの豊富な軸数を活かしたもので、動きがダイナミックでかっこいい。
 |  |  |
| 【動画】モーションジェネレータを利用して生成した前進歩行モーションの例 | 【動画】パラメーターを少し変えるだけで、ダッシュ歩行を生成できる | 【動画】こちらはモーションジェネレータで生成した大股すり足歩行の例 |
 |  |  |
| 【動画】モーションジェネレータでは、横歩き(サイドステップ)の生成も可能 | 【動画】旋回モーションにも対応しているので、モーションジェネレータだけで基本移動モーションをすべて生成できる | 【動画】付属CD-ROMに収録されている仰向けからの起き上がりモーション。両脚を開いて、見事に置きあがる |
 |  |  |
| 【動画】同じく付属CD-ROMに収録されているうつ伏せからの起き上がりモーション。こちらもユニークな起き上がり方でかっこいい | 【動画】サポートページで公開されているサンプルモーションの一つ「アッパー」モーション。腰軸を活かした、かっこいいモーションだ | 【動画】同じくサポートページで公開されているサンプルモーションの一つ「横パンチ」モーション |
 |  |  |
| 【動画】同じくサポートページで公開されているサンプルモーションの一つ「パンチ」モーション | 【動画】同じくサポートページで公開されているサンプルモーションの一つ「キック」モーション | 【動画】同じくサポートページで公開されているサンプルモーションの一つ「体操」モーション。足裏が小さいのに、見事な体操を見せてくれる |
2009/10/2 18:24